




 线搜索在数值优化中扮演关键角色,涉及到步长α的选择及其算法。精确算法包括一元二次问题的求解,非精确算法如Armijo、Curvature、Wolfe和Goldstein条件用于步长确定。此外,介绍了步长求解算法,如二次和三次插值法,以及zoom算法。线搜索的收敛性和收敛速度取决于搜索方向,如最速下降、牛顿或拟牛顿方法。最后讨论了牛顿方法中Hessian矩阵的替代策略。
线搜索在数值优化中扮演关键角色,涉及到步长α的选择及其算法。精确算法包括一元二次问题的求解,非精确算法如Armijo、Curvature、Wolfe和Goldstein条件用于步长确定。此外,介绍了步长求解算法,如二次和三次插值法,以及zoom算法。线搜索的收敛性和收敛速度取决于搜索方向,如最速下降、牛顿或拟牛顿方法。最后讨论了牛顿方法中Hessian矩阵的替代策略。
概述
在求解最优化问题中,线搜索是一类非常重要的迭代算法。线搜索的迭代过程是xk+1=xk+αkpk。其中αk和pk分别表示搜索步长和搜索方向,因此线搜索需要解决如何求解步长和确定搜索方向,该小结主要介绍
1. 步长αk的选择
2. 步长的实现算法
2. 线搜索的收敛性
3. 牛顿方法的优化
步长α的选择
根据迭代算法xk+1=xk+αkpk,根据之前的介绍搜索方向pk需要满足,它是一个下降方向,即满足∇fkpk≤0,则pk=−B−1k∇fk,B为对称非奇异矩阵,根据Bk的选择会产生以下几个方向:
1. Bk=I时,搜索方向为负梯度方向,该方法为最速下降方向。
2. Bk=∇2fk时,该方法为牛顿方法。
3. Bk需要满足对称正定矩阵,该方法为拟牛顿方法。
当搜索方向确定后,下一步就要确定步长。
问题形式
求解步长需要解决的一个最优化问题是,在确定了下降方向pk后,求解一个一元最优化问题
精确算法
对于一个一元二次问题,最优解形式为∇Tf(xk+αpk)pk=0,即∇Tfk+1pk=0
性质:对于最速下降法,当选择最优步长时,每一步的搜索方向和上一步是正交的,即pTk+1pk=0
证明:由于当选择为最优步长时满足∇Tfk+1pk=0。因此性质成立,pk+1=−∇fTk+1
非精确算法
非精确算法的思路就是寻找步长α的一个区间,通过逐步二分的方法去寻找满足条件的点。当搜索结束时,需要满足该步长能够对目标函数带来充分的减少。为提高非精确算法的搜索效率,α需要满足一定的条件。
Armijo条件
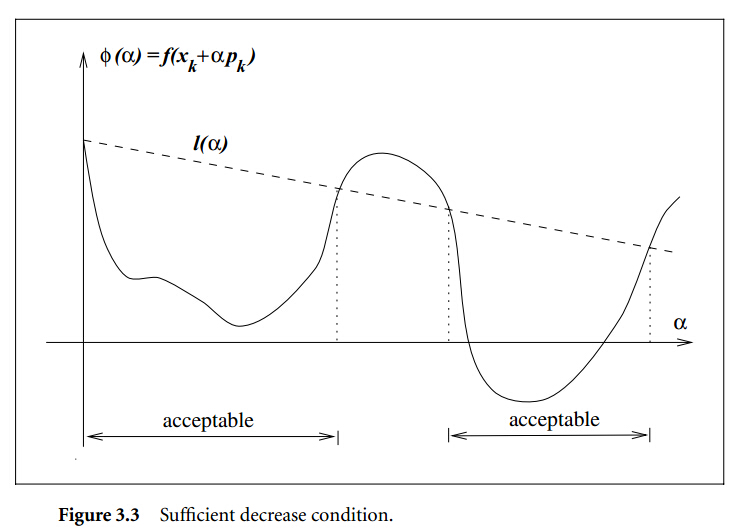
Armijo是一个相对比较简单的条件,即目标函数需要充分小。
通常情况下记:
在实际应用中,c1选择为10^-4,满足Armijo条件的情况如下图所示
Curvature条件
Curvature条件是指:
Curvature条件中的左边就是ϕ′(αk),而右边是ϕ′(0),或者l′(α),即在第K点的曲率要比初始点的曲率要大。由于右边是负值,则左边就是一个接近0或者大于0的一个值。
直观上看,如果该值接近0时,曲率接近水平,这样就接近最优解。图示如下

Wolfe条件
把上面两个条件组合后就是Wolfe条件,即需要满足
如果进一步进行约束,强Wolfe条件需要满足
满足Wolfe条件的区间如下图

满足强Wolfe条件的区间如下图

Wolfe条件存在性证明
定理:假设目标函数f是一个连续可导的,并且搜索方向pk为下降方向,同时函数f是有界的,在射线xk+αpk之下,则如果0<c1<c2<1,存在步长α满足Wolfe条件和强Wolfe条件。
证明:由于f在被限定在射线xk+αpk之下,则函数ϕ(α)=f(xk+αpk)和函数l(α)=fk+αc1∇fTkpk存在交点。
1. 记最小的交点为α′,则小于α′的区间都满足Wolfe的第一个条件。交点满足
2. 随机选择α′′∈(0,α′),根据中值定理有
3. 根据上面两个等式有
此时α′′满足Wolfe的第二个条件
Goldstein条件
该条件类似于Wolfe条件,但是需要步长减少的不能太少。该条件为
满足该条件的步长被两个射线包围着,使用该方法可能会错过最优解,图示如下

步长α求解算法
根据上面的介绍,我们可以知道求解步长,需要解决的问题是
1. 如果目标函数是凸函数,并且f(x)=12xTQx−bTx,则步长的最优解为α=−∇fTkpkpTkQpk
2. 如果目标函数是一个非线性问题,就需要用到迭代算法求解,寻找最优步长或者满足上述必要条件的步长。本节主要讨论目标函数的梯度存在,如果不存在还会有其他算法。求解步骤一般分为两步,一是寻找一个包含解的区间,二是逐渐放大该步长,直到满足条件。
插值法
使用插值法的目标是寻找一个步长的递减序列,直到找到一个满足约束的步长。
二次插值
根据Armijo条件,步长的选择应该满足使得目标函数充分减小,该条件为
对于初始值α0满足上述约束,则结束。否则减小步长值,即α1∈(0,α0)。
此时运用二次插值法,寻找插值函数ϕq(α)满足一下条件
三次插值
如果上述\alpha_1满足约束条件则结束,否则需要进行三次插值,即寻找插值函数ϕc(α)满足一下值相等,ϕ(0),ϕ′(0),ϕ(α0),ϕ(α1)。假设求得ϕc(α)为
如果满足约束则结束,否则继续利用最近的两个步长值和初始值继续进行三次插值,直到结束。如果两次的步长比较相近,则αk=αk−12
初始化步长选择
对于牛顿或者拟牛顿法,初始化步长可以选择为1,对于其他非scaled的方法,初始化比较重要。
1. 方法一假设在xk和xk−1处一阶梯度改变相同,即满足α0∇fTkpk=αk−1∇fTk−1pk−1
2. 在f(xk−1),f(xk),∇fTk−1pk−1处进行二次插值,此时α0=2(fk−fk−1)ϕ′(0)
步长求解算法
寻找满足强Wolfe条件的步长,该条件为
该算法分为两步,一是寻找一个包含解的区间;二是运用zoom算法寻找满足约束条件的解。
算法框架
在调用zoom算法前,寻找一个步长的下界使得在该区间内包含最优解α∗,算法描述如下
算法主要包含以下4步
1. 评价当前步长,判断是否满足充分小条件,如果不满足说明最优解在(αi−1,αi)之间。
2. 否则满足强Wolfe的条件1,验证条件2是否满足,如果满足则结束。
3. 如果不满足条件2,并且当前梯度为正值时,交互上一个步长调用zoom算法结束(为什么调换,看zoom算法介绍)
4. 求解下一个步长点,可以采用插值法。
下图描述了需要调用zoom算法的两类条件,分别对应1和3:

zoom算法
zoom算法的输入比较特殊,输入需要满足(αl,αh)
1. 该区间内包含满足强Wolfe条件的步长
2. 步长αl是两个值中目标函数值较小的一个
3. 选择αh如果该点满足ϕ′(αl)(αh−αl)<0,表明该区间是一个连续下降的区间
zoom算法描述如下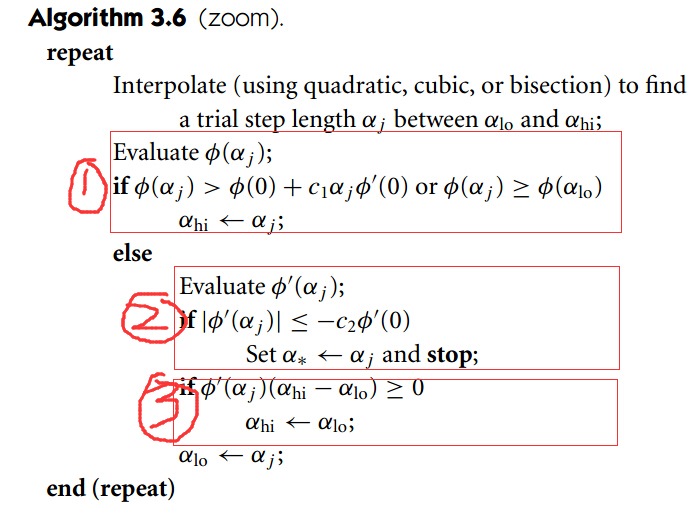
算法流程为
1. 检查是否满足Wolfe的条件一,如果不满足缩减区间。
2. 检查是否满足条件2 ,如果满足则返回
3. 检查是否是递增区间,如果是进行调整,使其满足zoom输入条件。
线搜索的收敛性
- 如果搜索方向选择为“最速下降方向”即负梯度方向,则能达到一个“全局收敛”状态,此时满足limk→∞||∇fk||=0
- 对于牛顿方法或者伪牛顿方法(pNk=−B−1k∇fk)只要满足Bk的条件数有界限并且正定则也能达到全局收敛。
- 对于共轭梯度方法,只要满足limk→∞inf||∇fk||=0,即只要一个子序列收敛即可。
- 对于任何搜索方向,只要满足1)每一个步目标值都在下降2)每隔一定步数都能达到一个最优下降方向,都能收敛。即不要求每一步都下降,可以周期性下降。
收敛速度
当搜索方向为最优下降方向是,为线性收敛速度。
当搜索方向为牛顿方向,即pNk=−∇2f−1k∇fk,如果∇2fk正定,则牛顿法为二次收敛。(但是牛顿方向不总是为正定,因此Hessian在使用时需要进一步调整)
当搜索方向为伪牛顿方向时,收敛速度为超线性。
牛顿方法–Hessian矩阵替代品
- 牛顿方法中,搜索方向需要满足∇2fkpNk=−∇fk,如果∇2fk正定,可以得到搜索方向
牛顿方法中,Hessian矩阵不总是正定的,会导致搜索方向不总是下降方向,从而导致牛顿方法不总能找到最优解。
但是可以找到一些替代方法,例如
- 通过特征值修改:∇2fk=QΛQ
- 添加常数因子,$B_k=\nabla^2f_k+λI\$
- 修改Cholesky算法
总结
通过该章的学习,能够了解
1. 线搜索的基本形式以及需要解决的问题
2. 常见步长α需要满足的条件以及实现算法
3. 线搜索的收敛速度
4. 牛顿方法的优化

















 979
979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









