







 本文介绍了解决在使用printf函数时遇到的无法进入仿真问题的方法。通过对usart文件进行相应配置,包括添加与printf相关的函数和支持代码,可以有效解决该问题。此外,还讨论了在移植串口文件过程中遇到的问题及解决策略。
本文介绍了解决在使用printf函数时遇到的无法进入仿真问题的方法。通过对usart文件进行相应配置,包括添加与printf相关的函数和支持代码,可以有效解决该问题。此外,还讨论了在移植串口文件过程中遇到的问题及解决策略。
一. 问题描述
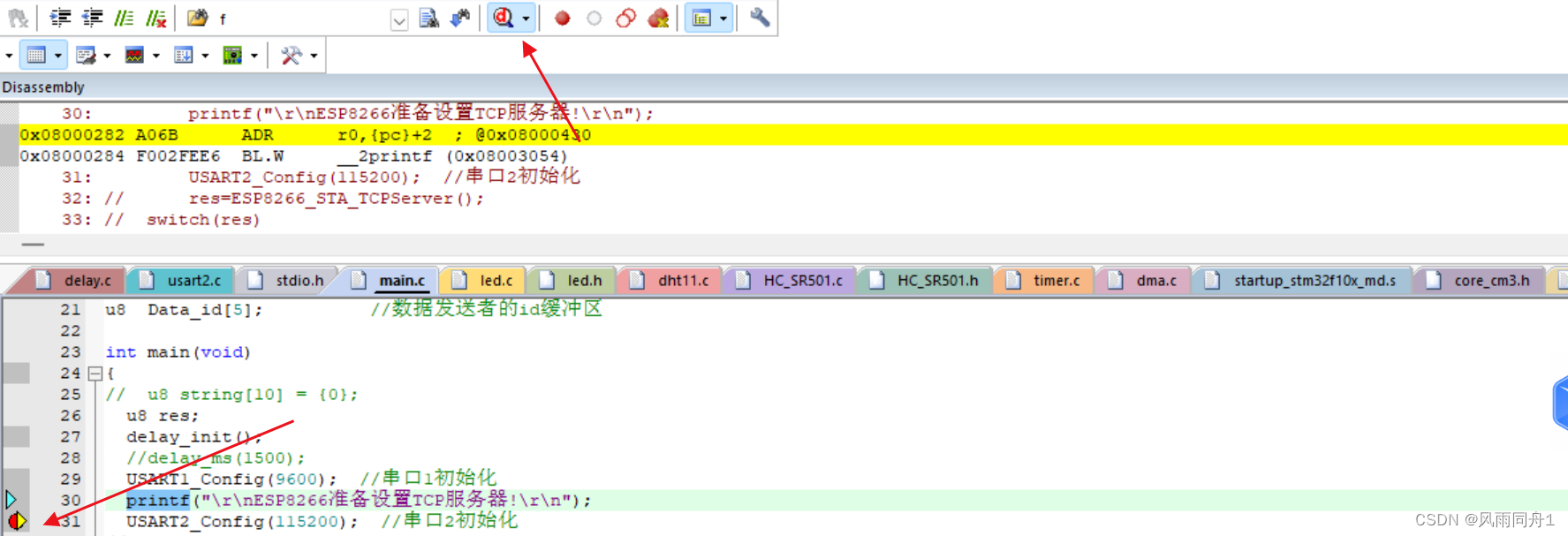
在使用仿真调试的时候,发现只要将printf函数添加上之后,就出现无法进入仿真的问题,程序即使下载到板子上,也无法更新程序
二.解决方法
在usart文件中,添加上与printf相关的函数,添加后编译烧录可正常进入仿真
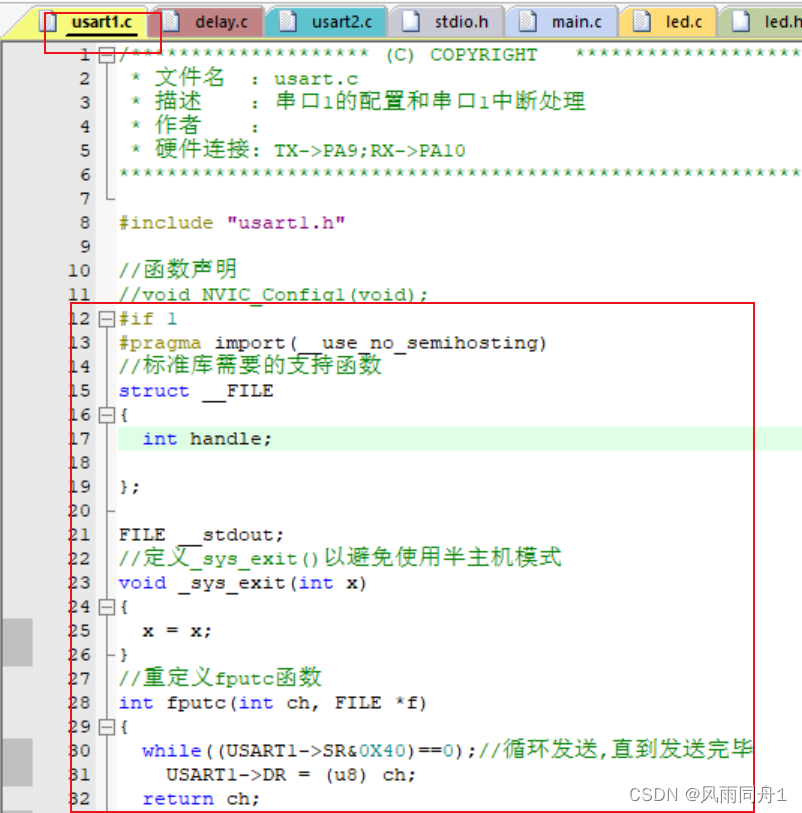
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
三.问题扩展
在移植串口文件时,由于usart 文件重名的原因,移除旧的串口文件,出现新的函数找不到的问题,USART1_Config进入不了定义,程序正常编译和烧录,但是无法进入仿真

最后通过修改文件名,重新添加源文件,重新包含文件路径,可成功进入USART1_Config定义,并且正常编译和烧录,与仿真。

第二个问题
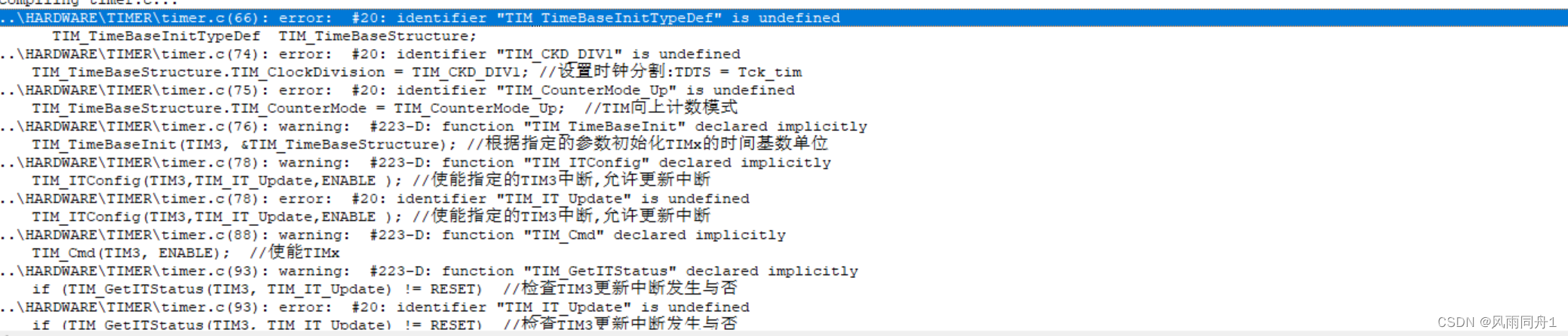
比如结构体无法找到
TIM_TimeBaseInitTypeDef
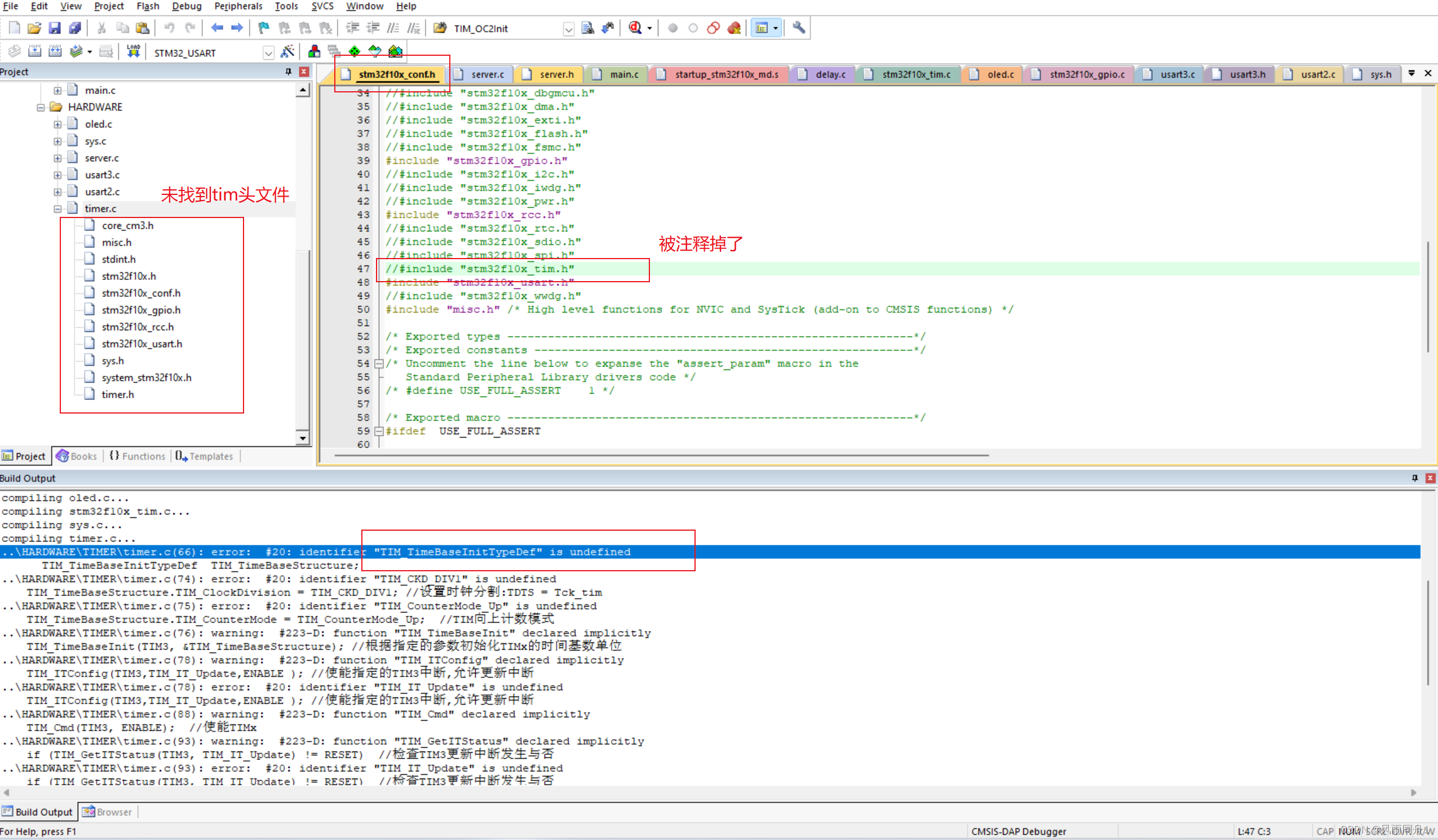
第二个问题解决



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











