







 本文深入探讨了摄像机标定的原理,包括摄像机成像模型(透镜投影、正交、透视模型)、三个坐标系(世界坐标、摄像机坐标、图像坐标)的定义及其关系,以及刚体变换、几何畸变(径向畸变、切向畸变、薄棱镜畸变)的详细解析,提供了数学模型和相关效应示例。
本文深入探讨了摄像机标定的原理,包括摄像机成像模型(透镜投影、正交、透视模型)、三个坐标系(世界坐标、摄像机坐标、图像坐标)的定义及其关系,以及刚体变换、几何畸变(径向畸变、切向畸变、薄棱镜畸变)的详细解析,提供了数学模型和相关效应示例。
摄像机标定------标定原理
一:摄像机成像原理

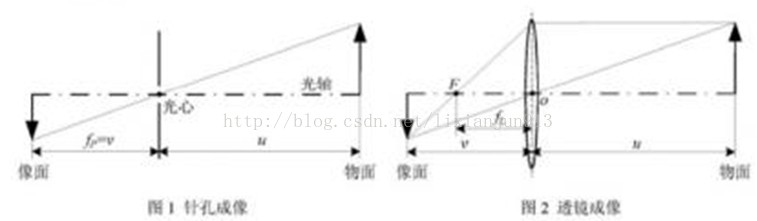
摄像机成像模型一般有三种:透镜投影模型(小孔摄像机模型)、正交投影模型和透视投影模型
光学中最基本的高斯成像公式:1/u + 1/v = 1/f (式一)
原理图如下:
二:认识三个坐标系
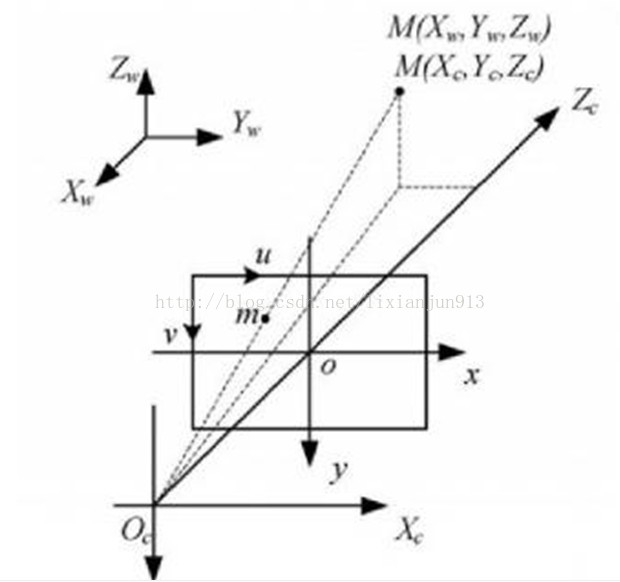
三个坐标系的关系图
如上图表示的三个坐标系分别为世界坐标系,摄像机坐标系,图像坐标系
1:世界坐标系(Xw Yw Zw)
一:摄像机成像原理
摄像机成像模型一般有三种:透镜投影模型(小孔摄像机模型)、正交投影模型和透视投影模型
光学中最基本的高斯成像公式:1/u + 1/v = 1/f (式一)
原理图如下:
二:认识三个坐标系
三个坐标系的关系图
如上图表示的三个坐标系分别为世界坐标系,摄像机坐标系,图像坐标系
1:世界坐标系(Xw Yw Zw)
 1277
1277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























