







如果图中任意两点都是连通的,那么图被称作连通图。如果此图是有向图,则称为强连通图
1,图(Graph)是由顶点的有穷非空集合和顶点之间的边的集合组成,通常表示为:G(V,E),
其中,G表示一个图,V是图G中顶点的集合,E是图G中边的集合
1,线性表中我们把数据元素叫元素,树中将数据元素叫节点,在图中数据元素,
我们则称之为顶点(Vertex)
2,线性表中可以没有数据元素,称为空表.数中可以没有节点,叫做空树.但是对于图而言,
不允许没有顶点,顶点集合是有穷非空的
3,线性表中,相邻的数据元素之间具有线性关系,树结构中,相邻的两层节点具有层次关系.
而图中,任意两定点之间都可能有关系.
2,无向边:若顶点Vi到Vj之间的边没有方向,则称这条边为无向边(Edge),用无序偶对
(Vi,Vj)来表示。如果图中任意两个顶点之间的边都是无向边,则称该图为无向图
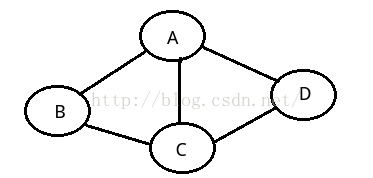
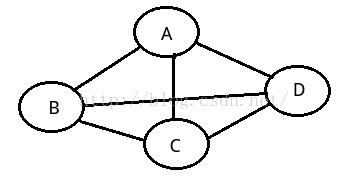
如上:无向图G1来说:G1= {V1,{E1}},其中顶点集合V1={A,B,C,D};边集合
E1 = {(A,B),(B,C),(C,D),(D,A),(A,C)};
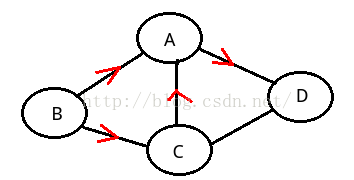
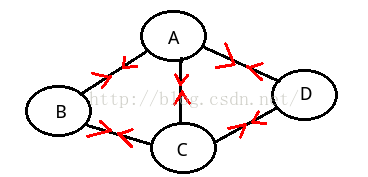
有向边:若从顶点Vi到Vj的边为有方向,则称这条边为有向边,也称为弧(Arc),用有序偶
<Vi,Vj>来表示,Vi称为弧尾(Tail),Vj称为弧头(Head)。如果图中任意两个顶点之间
的边都是有向边,则称该图为有向图。如下:
简单图:在图中,若不存在顶点到其自身的边,且同一条边不重复出现。
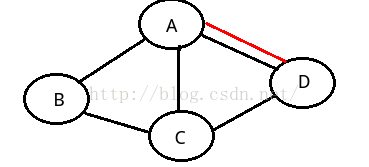
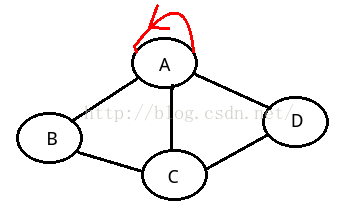
如上两个图都不是简单图。。。
无向完全图:在无向图中,如果任意两个顶点之间都存在边。如下图....。。。。
有向完全图:如果任意两个顶点之间都存在方向互为相反的两条弧。
稀疏图:有很少条边的图
稠密图:有很多条边的图(相对而言。。。)
网:图的边或者弧有与它相关的数字,这种与图的边或弧相关的数叫做权(weight)。权可以表示
从一个顶点到与另一个顶点的距离或耗费。。。称之为往。。。
连通图:任意两个顶点都是连通的。。。。

如上图:A永远都到不了E,所以不是连通图。。。
无向图节点的边数叫做度,有向图的顶点分为入度和出度
1,邻接矩阵
图的邻接矩阵存储方式是用两个数组来表示图。
一个一维数组存储图中的顶点信息,一个二维数组存储图中的边或弧的信息
(无向图)
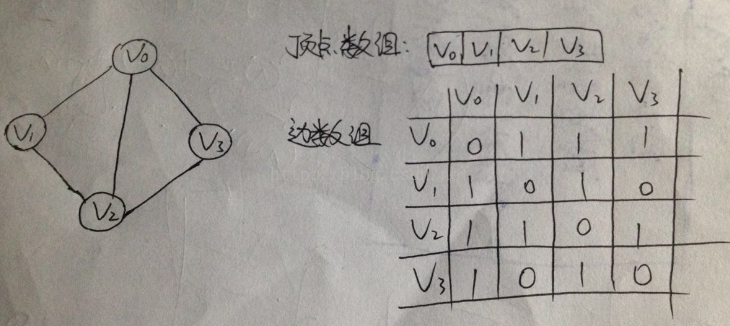
可以知道:无向图是一个对称矩阵。。。。。
(有向图)
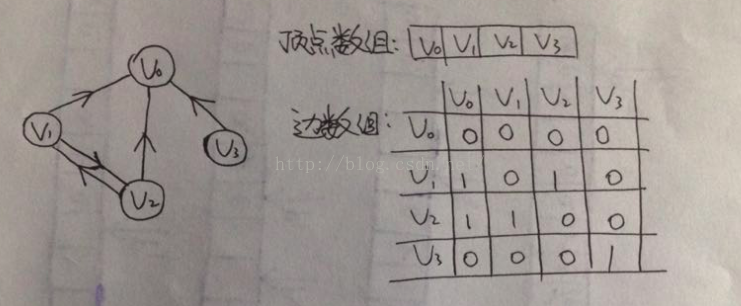
有向图讲究出度和入度,我们正好可以根据行列各数之和求出入度和出度。。。。。
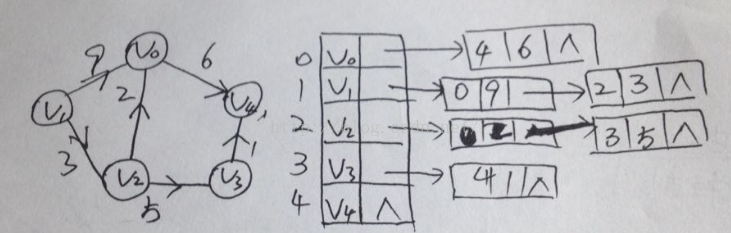
(网)

我们用无穷来表示一个计算机允许的,大于所有边上权值的值,也就是一个不可能的极限值。。。。
为什么不用0来表示呢???
权值大多数情况下是正值,但是个别时候可能就算0,甚至有可能是负值(范围表示)
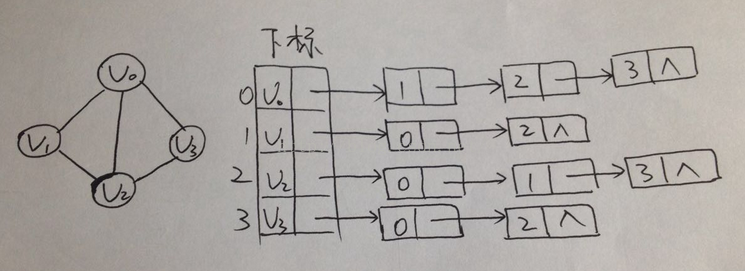
2,邻接表
邻接矩阵是不错的一种图存储结构,但是我们也发现,对于边数相对较少的图,这种结构是
对存储空间的极大的浪费。如:我们的图为下面的稀疏图的时候。
所以,我们就需要考虑另外一种存储结构了,我们也知道:当顺序存储结构造成空间的浪费
问题的时候,出现了链式结构。所以:我们将数组和链表相结合产生的存储方式称为邻接表。
1,图中顶点用一个一维数组存储,此外:对于顶点数组中,每个数据元素还需要存储指向
第一个邻接点的指针。
2,图中每个顶点的所有邻接点构成一个线性表,由于邻接点的个数不一定,所以用单链表
存储。。。
(无向图)
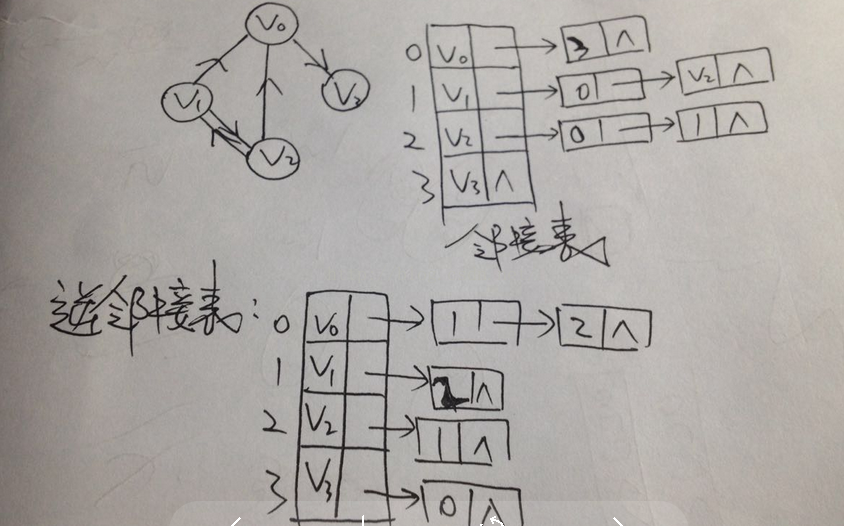
(有向图)
网:
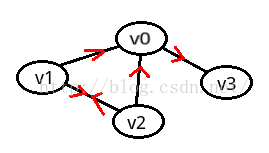
3,十字链表
对于有向图而言,邻接表是有缺陷的。关心了出度问题,想要知道入度就必须要遍历整个图才能直到,
反之,逆邻接表解决了入度却不了解出度的问题。那么有没有可以把邻接表和逆邻接表结合起来的方
法呢???
答案是肯定的,就是把它们整合在一起。这就是我们要提到的有向图的一种存储方式:十字链表
重新定义顶点表节点结构

其中firstin表示入边表头指针,指向该顶点的入边表中的第一个节点,firstout表示出边表头指针,
指向该顶点的出边表中的第一个节点。
重新定义的边表节点结构
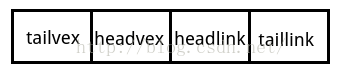
其中tailvex是指弧起点在顶点表的下标,headvex是指弧终点在顶点表中下标,headlink是指入边表
指针域,指向终点相同的下一条边,taillink是指边表指针域,指向起点相同的下一条边。如果是网
,还可以增加一个weight域来存储权值。。。。。
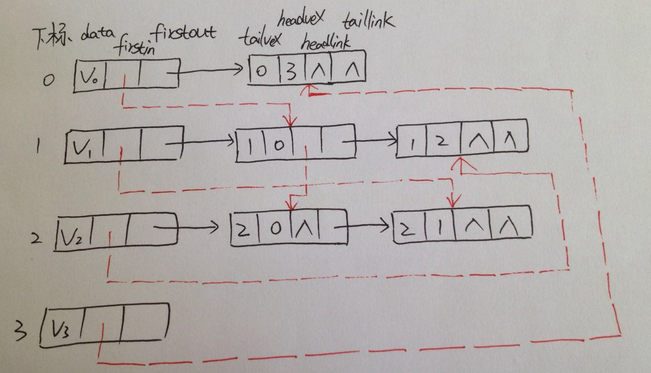
十字链表的好处就是将邻接表和逆邻接表整合在了一起,这样可以很容易的求出入度和出度。。。。
同样的,除了结构复杂一点外,其实创建图算法的时间复杂度和邻接表是相同的。。。。
4,图的遍历
从图中某一顶点出发访遍图中其余顶点,且使每一个顶点仅被访问一次。
1,深度优先
深度优先遍历(Depth_First_Search),也有称为深度优先搜索,简称DFS。
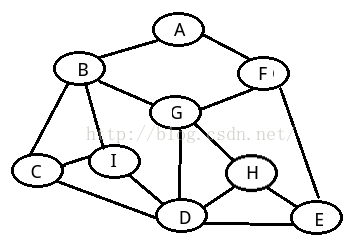
我们深度遍历:A,B,C,D,E,F,G,H,I
2,广度优先遍历
广度优先遍历(Breadth_First_Search),又称为广度;优先搜索,简称BFS
同样的,我们广度搜索:A,(B,F),(C,I,G,E),(D,H)
5,最小生成树
我们把构造连通网的最小代价生成树称为最小生成树(Minimum Cost Spanning Tree)
1,尽可能选取权值小的边,但是不能构成回路
2,选取n-1条恰当的边以连接网中的n个顶点
找连通网的最小生成树,经典的有两种算法:普利姆算法和科鲁斯卡尔算法(都属于贪心算法)
1,普利姆(Prim)算法
1).输入:一个加权连通图,其中顶点集合为V,边集合为E;
2).初始化:Vnew = {x},其中x为集合V中的任一节点(起始点)
3).重复下列操作,直到Vnew = V:
a.在集合E中选取权值最小的边<u, v>,其中u为集合Vnew中的元素,而v不在Vnew集合当中,并且 v∈V(如果存在有多条满足前述条件即具有相同权值的边,则可任意选取其中之一);
b.将v加入集合Vnew中,将<u, v>边加入集合Enew中;
4).输出:使用集合Vnew和Enew来描述所得到的最小生成树。
下面对算法的图例描述
| 图例 | 说明 | 不可选 | 可选 | 已选(Vnew) |
|---|---|---|---|---|
|
| 此为原始的加权连通图。每条边一侧的数字代表其权值。 | - | - | - |
|
| 顶点D被任意选为起始点。顶点A、B、E和F通过单条边与D相连。A是距离D最近的顶点,因此将A及对应边AD以高亮表示。 | C, G | A, B, E, F | D |
|
| 下一个顶点为距离D或A最近的顶点。B距D为9,距A为7,E为15,F为6。因此,F距D或A最近,因此将顶点F与相应边DF以高亮表示。 | C, G | B, E, F | A, D |
 | 算法继续重复上面的步骤。距离A为7的顶点B被高亮表示。 | C | B, E, G | A, D, F |
|
| 在当前情况下,可以在C、E与G间进行选择。C距B为8,E距B为7,G距F为11。E最近,因此将顶点E与相应边BE高亮表示。 | 无 | C, E, G | A, D, F, B |
|
| 这里,可供选择的顶点只有C和G。C距E为5,G距E为9,故选取C,并与边EC一同高亮表示。 | 无 | C, G | A, D, F, B, E |
|
| 顶点G是唯一剩下的顶点,它距F为11,距E为9,E最近,故高亮表示G及相应边EG。 | 无 | G | A, D, F, B, E, C |
|
| 现在,所有顶点均已被选取,图中绿色部分即为连通图的最小生成树。在此例中,最小生成树的权值之和为39。 | 无 | 无 | A, D, F, B, E, C, G |







Kruskal算法
1.概览
Kruskal算法是一种用来寻找最小生成树的算法,由Joseph Kruskal在1956年发表。用来解决同样问题的还有Prim算法和Boruvka算法等。三种算法都是贪婪算法的应用。和Boruvka算法不同的地方是,Kruskal算法在图中存在相同权值的边时也有效。
2.算法简单描述
1).记Graph中有v个顶点,e个边
2).新建图Graphnew,Graphnew中拥有原图中相同的e个顶点,但没有边
3).将原图Graph中所有e个边按权值从小到大排序
4).循环:从权值最小的边开始遍历每条边 直至图Graph中所有的节点都在同一个连通分量中
if 这条边连接的两个节点于图Graphnew中不在同一个连通分量中
添加这条边到图Graphnew中
图例描述:
 首先第一步,我们有一张图Graph,有若干点和边
首先第一步,我们有一张图Graph,有若干点和边

将所有的边的长度排序,用排序的结果作为我们选择边的依据。这里再次体现了贪心算法的思想。资源排序,对局部最优的资源进行选择,排序完成后,我们率先选择了边AD。这样我们的图就变成了右图
 在剩下的变中寻找。我们找到了CE。这里边的权重也是5
在剩下的变中寻找。我们找到了CE。这里边的权重也是5
 依次类推我们找到了6,7,7,即DF,AB,BE。
依次类推我们找到了6,7,7,即DF,AB,BE。

下面继续选择, BC或者EF尽管现在长度为8的边是最小的未选择的边。但是现在他们已经连通了(对于BC可以通过CE,EB来连接,类似的EF可以通过EB,BA,AD,DF来接连)。所以不需要选择他们。类似的BD也已经连通了(这里上图的连通线用红色表示了)。
3.简单证明Kruskal算法
对图的顶点数n做归纳,证明Kruskal算法对任意n阶图适用。
归纳基础:
n=1,显然能够找到最小生成树。
归纳过程:
假设Kruskal算法对n≤k阶图适用,那么,在k+1阶图G中,我们把最短边的两个端点a和b做一个合并操作,即把u与v合为一个点v',把原来接在u和v的边都接到v'上去,这样就能够得到一个k阶图G'(u,v的合并是k+1少一条边),G'最小生成树T'可以用Kruskal算法得到。
我们证明T'+{<u,v>}是G的最小生成树。
用反证法,如果T'+{<u,v>}不是最小生成树,最小生成树是T,即W(T)<W(T'+{<u,v>})。显然T应该包含<u,v>,否则,可以用<u,v>加入到T中,形成一个环,删除环上原有的任意一条边,形成一棵更小权值的生成树。而T-{<u,v>},是G'的生成树。所以W(T-{<u,v>})<=W(T'),也就是W(T)<=W(T')+W(<u,v>)=W(T'+{<u,v>}),产生了矛盾。于是假设不成立,T'+{<u,v>}是G的最小生成树,Kruskal算法对k+1阶图也适用。
由数学归纳法,Kruskal算法得证。
7,最短路径。。。。。
最短路径是指两顶点之间经过的边上的权值之和最少的路径,并且我们称为路径上的第一个顶点是源点
,最后一个是终点。。。。
Dijkstra算法
1.定义概览
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。注意该算法要求图中不存在负权边。
问题描述:在无向图 G=(V,E) 中,假设每条边 E[i] 的长度为 w[i],找到由顶点 V0 到其余各点的最短路径。(单源最短路径)
2.算法描述
1)算法思想:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
2)算法步骤:
a.初始时,S只包含源点,即S={v},v的距离为0。U包含除v外的其他顶点,即:U={其余顶点},若v与U中顶点u有边,则<u,v>正常有权值,若u不是v的出边邻接点,则<u,v>权值为∞。
b.从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。
c.以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边上的权。
d.重复步骤b和c直到所有顶点都包含在S中。
执行动画过程如下图

先给出一个无向图

用Dijkstra算法找出以A为起点的单源最短路径步骤如下

一.问题引入
问题:从某顶点出发,沿图的边到达另一顶点所经过的路径中,各边上权值之和最小的一条路径——最短路径。解决最短路的问题有以下算法,Dijkstra算法,Bellman-Ford算法,Floyd算法和SPFA算法,另外还有著名的启发式搜索算法A*,不过A*准备单独出一篇,其中Floyd算法可以求解任意两点间的最短路径的长度。笔者认为任意一个最短路算法都是基于这样一个事实:从任意节点A到任意节点B的最短路径不外乎2种可能,1是直接从A到B,2是从A经过若干个节点到B。
二.Dijkstra算法
该算法在《数据结构》课本里是以贪心的形式讲解的,不过在《运筹学》教材里被编排在动态规划章节,建议读者两篇都看看。

观察右边表格发现除最后一个节点外其他均已经求出最短路径。
(1) 迪杰斯特拉(Dijkstra)算法按路径长度(看下面表格的最后一行,就是next点)递增次序产生最短路径。先把V分成两组:
- S:已求出最短路径的顶点的集合
- V-S=T:尚未确定最短路径的顶点集合
将T中顶点按最短路径递增的次序加入到S中,依据:可以证明V0到T中顶点Vk的最短路径,或是从V0到Vk的直接路径的权值或是从V0经S中顶点到Vk的路径权值之和(反证法可证,说实话,真不明白哦)。
(2) 求最短路径步骤
- 初使时令 S={V0},T={其余顶点},T中顶点对应的距离值, 若存在<V0,Vi>,为<V0,Vi>弧上的权值(和SPFA初始化方式不同),若不存在<V0,Vi>,为Inf。
- 从T中选取一个其距离值为最小的顶点W(贪心体现在此处),加入S(注意不是直接从S集合中选取,理解这个对于理解vis数组的作用至关重要),对T中顶点的距离值进行修改:若加进W作中间顶点,从V0到Vi的距离值比不加W的路径要短,则修改此距离值(上面两个并列for循环,使用最小点更新)。
- 重复上述步骤,直到S中包含所有顶点,即S=V为止(说明最外层是除起点外的遍历)。
下面是上图的求解过程,按列来看,第一列是初始化过程,最后一行是每次求得的next点。

(3) 问题:Dijkstar能否处理负权边?(来自《图论》)
答案是不能,这与贪心选择性质有关(ps:貌似还是动态规划啊,晕了),每次都找一个距源点最近的点(dmin),然后将该距离定为这个点到源点的最短路径;但如果存在负权边,那就有可能先通过并不是距源点最近的一个次优点(dmin'),再通过这个负权边L(L<0),使得路径之和更小(dmin'+L<dmin),则dmin'+L成为最短路径,并不是dmin,这样dijkstra就被囧掉了。比如n=3,邻接矩阵:
0,3,4
3,0,-2
4,-2,0,用dijkstra求得d[1,2]=3,事实上d[1,2]=2,就是通过了1-3-2使得路径减小。不知道讲得清楚不清楚。
二.Floyd算法
参考了南阳理工牛帅(目前在新浪)的博客。
Floyd算法的基本思想如下:从任意节点A到任意节点B的最短路径不外乎2种可能,1是直接从A到B,2是从A经过若干个节点到B,所以,我们假设dist(AB)为节点A到节点B的最短路径的距离,对于每一个节点K,我们检查dist(AK) + dist(KB) < dist(AB)是否成立,如果成立,证明从A到K再到B的路径比A直接到B的路径短,我们便设置 dist(AB) = dist(AK) + dist(KB),这样一来,当我们遍历完所有节点K,dist(AB)中记录的便是A到B的最短路径的距离。
很简单吧,代码看起来可能像下面这样:
for (int i=0; i<n; ++i) {
for (int j=0; j<n; ++j) {
for (int k=0; k<n; ++k) {
if (dist[i][k] + dist[k][j] < dist[i][j] ) {
dist[i][j] = dist[i][k] + dist[k][j];
}
}
}
}但是这里我们要注意循环的嵌套顺序,如果把检查所有节点K放在最内层,那么结果将是不正确的,为什么呢?因为这样便过早的把i到j的最短路径确定下来了,而当后面存在更短的路径时,已经不再会更新了。
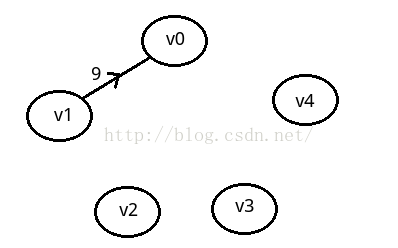
让我们来看一个例子,看下图:

图中红色的数字代表边的权重。如果我们在最内层检查所有节点K,那么对于A->B,我们只能发现一条路径,就是A->B,路径距离为9,而这显然是不正确的,真实的最短路径是A->D->C->B,路径距离为6。造成错误的原因就是我们把检查所有节点K放在最内层,造成过早的把A到B的最短路径确定下来了,当确定A->B的最短路径时dist(AC)尚未被计算。所以,我们需要改写循环顺序,如下:
ps:个人觉得,这和银行家算法判断安全状态(每种资源去测试所有线程),树状数组更新(更新所有相关项)一样的思想。
for (int k=0; k<n; ++k) {
for (int i=0; i<n; ++i) {
for (int j=0; j<n; ++j) {
/*
实际中为防止溢出,往往需要选判断 dist[i][k]和dist[k][j
都不是Inf ,只要一个是Inf,那么就肯定不必更新。
*/
if (dist[i][k] + dist[k][j] < dist[i][j] ) {
dist[i][j] = dist[i][k] + dist[k][j];
}
}
}
} 如果还是看不懂,那就用草稿纸模拟一遍,之后你就会豁然开朗。半个小时足矣(早知道的话会节省很多个半小时了。。![]() )
)
再来看路径保存问题:
void floyd() {
for(int i=1; i<=n ; i++){
for(int j=1; j<= n; j++){
if(map[i][j]==Inf){
path[i][j] = -1;//表示 i -> j 不通
}else{
path[i][j] = i;// 表示 i -> j 前驱为 i
}
}
}
for(int k=1; k<=n; k++) {
for(int i=1; i<=n; i++) {
for(int j=1; j<=n; j++) {
if(!(dist[i][k]==Inf||dist[k][j]==Inf)&&dist[i][j] > dist[i][k] + dist[k][j]) {
dist[i][j] = dist[i][k] + dist[k][j];
path[i][k] = i;
path[i][j] = path[k][j];
}
}
}
}
}
void printPath(int from, int to) {
/*
* 这是倒序输出,若想正序可放入栈中,然后输出。
*
* 这样的输出为什么正确呢?个人认为用到了最优子结构性质,
* 即最短路径的子路径仍然是最短路径
*/
while(path[from][to]!=from) {
System.out.print(path[from][to] +"");
to = path[from][to];
}
}













 753
753











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









