







 本文探讨了三角测量原理在双目视觉中的应用,如何利用两台相机从不同角度拍摄的图像恢复物体的三维坐标信息,特别是景深信息的计算。通过相似三角形的原理,建立了景深、基线距离和视差之间的关系,进而恢复X和Y坐标维度信息。然而,确定像点对应关系和求解视差是这一过程中的主要难点。
本文探讨了三角测量原理在双目视觉中的应用,如何利用两台相机从不同角度拍摄的图像恢复物体的三维坐标信息,特别是景深信息的计算。通过相似三角形的原理,建立了景深、基线距离和视差之间的关系,进而恢复X和Y坐标维度信息。然而,确定像点对应关系和求解视差是这一过程中的主要难点。
1.引言
眼睛是灵敏的光学感觉器官,是一切动物与外界联系的信息接受器。众所周知人类依靠双眼可以感知现实世界:物体的颜色、距离、大小等。随着生物解剖学的发展,人们对人眼的生物结构及机能有了科学的认识。人眼是一个天然的高级光学系统。结构非常复杂。形象的说,人眼像一架自动摄像机,水晶体如同摄像机的物镜,能够在人的神经器官的控制下自动调焦,瞳孔如同光圈,视网膜如同相机底片,接受物体的 影像信息。人眼感知景深的机制给了人们启发。 经过研究发现由相机在两个不同的视角下拍摄的两幅图片,如果知道现实物点 P 在两
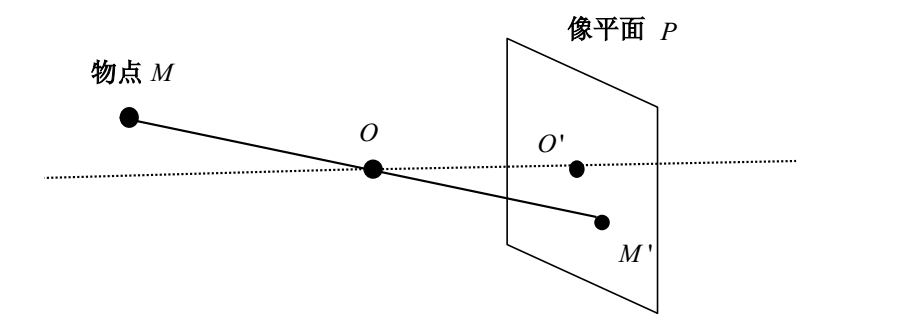
幅图片中的对应关系, 就可以精确计算出 P 点的三维坐标信息。可以用针孔模型来近似描述相机的成像机制,如图所示。 M 为现实场景中的一物点, O为相机的光心, O' 为光心在像平面上的投影, OO'为相机光轴,M '为物点 M 在像平面 P 上的像点。
针孔模型
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









