







在关于move base 的配置文章中,关于planner部分的分析有一句:
对于global planner,可以采用以下三种实现之一:
"navfn/NavfnROS","global_planner/GlobalPlanner","carrot_planner/CarrotPlanner"本文分析其中的一种实现"global_planner/GlobalPlanner" :
首先,move base是通过plugin调用它的:
文件bgp_plugin.xml
<library path="lib/libglobal_planner">
<class name="global_planner/GlobalPlanner" type="global_planner::GlobalPlanner" base_class_type="nav_core::BaseGlobalPlanner">
<description>
A implementation of a grid based planner using Dijkstras or A*
</description>
</class>
</library>
然后在package.xml的配置中,加入如下行:
<export>
<nav_core plugin="${prefix}/bgp_plugin.xml" />
</export>planner 部分的入口:
int main(int argc, char** argv) {
ros::init(argc, argv, "global_planner");
tf::TransformListener tf(ros::Duration(10));
costmap_2d::Costmap2DROS lcr("costmap", tf);
//需要一个costmap,传递给planner初始化
global_planner::PlannerWithCostmap pppp("planner", &lcr);
ros::spin();
return 0;
}在class PlannerWithCostmap 的构造函数中:
PlannerWithCostmap::PlannerWithCostmap(string name, Costmap2DROS* cmap) :GlobalPlanner(name, cmap->getCostmap(), cmap->getGlobalFrameID())
{
ros::NodeHandle private_nh("~");
cmap_ = cmap;
make_plan_service_ = private_nh.advertiseService("make_plan", &PlannerWithCostmap::makePlanService, this);
pose_sub_ = private_nh.subscribe<rm::PoseStamped>("goal", 1, &PlannerWithCostmap::poseCallback, this);
}
这里开启了两个线程,第一个是提供plan service,一旦由请求,就调用bool success = makePlan(req.start, req.goal, path);;第二个是去订阅goal,拿到goal之后,就调用makePlan(start, *goal, path); 。
而的定义是:bool GlobalPlanner::makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, double tolerance, std::vector<geometry_msgs::PoseStamped>& plan)
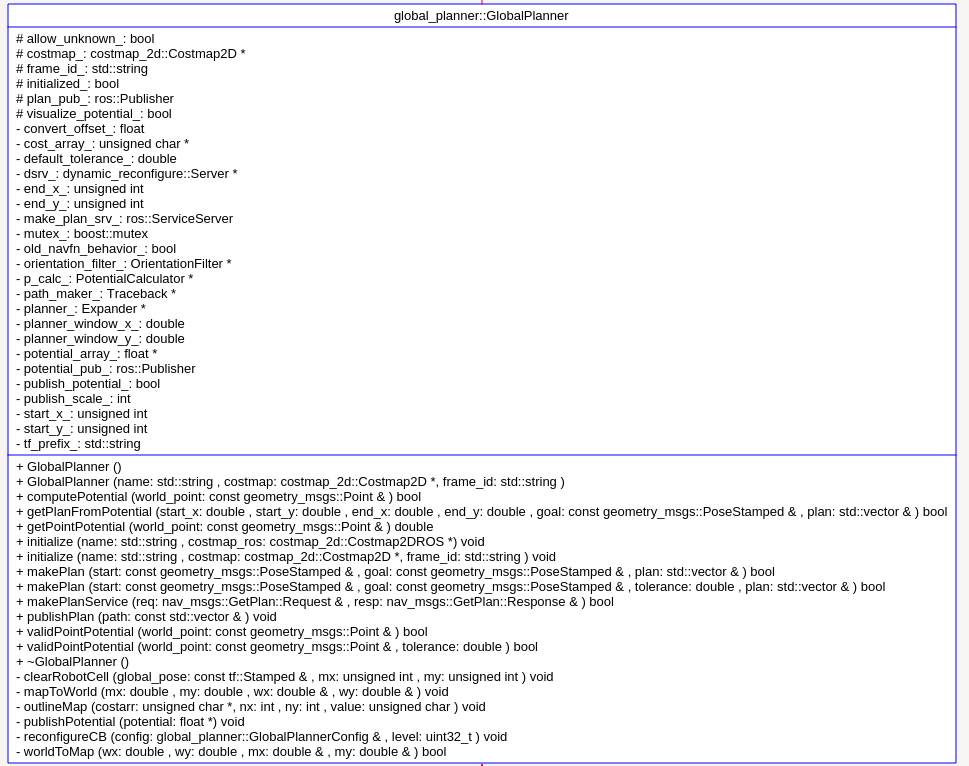
主要的逻辑部分在于class GlobalPlanner:
makePlan 函数体的主要内容:
bool GlobalPlanner::makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, double tolerance, std::vector<geometry_msgs::PoseStamped>& plan)
{
plan.clear();//清除plan
double wx = start.pose.position.x;
double wy = start.pose.position.y;
costmap_->worldToMap(wx, wy, start_x_i, start_y_i)//将start转到地图的cell表达坐标
...
//同样,将目标点也转到map表达
costmap_->worldToMap(wx, wy, goal_x_i, goal_y_i))
...
//然后将开始点设置为FREE_SPACE
clearRobotCell(start_pose, start_x_i, start_y_i);
//分配空间,大小和costmap一样大
p_calc_->setSize(nx, ny);
planner_->setSize(nx, ny);
path_maker_->setSize(nx, ny);
potential_array_ = new float[nx * ny];
//调用以下函数将costmap的四个边的全部cell都设置为LETHAL_OBSTACLE
outlineMap(costmap_->getCharMap(), nx, ny, costmap_2d::LETHAL_OBSTACLE);
//计算potential
bool found_legal = planner_->calculatePotentials(costmap_->getCharMap(), start_x, start_y, goal_x, goal_y, nx * ny * 2, potential_array_);
planner_->clearEndpoint(costmap_->getCharMap(), potential_array_, goal_x_i, goal_y_i, 2);
if (found_legal)
{
if (getPlanFromPotential(start_x, start_y, goal_x, goal_y, goal, plan)) //extract the plan
{//make sure the goal we push on has the same timestamp as the rest of the plan
geometry_msgs::PoseStamped goal_copy = goal;
goal_copy.header.stamp = ros::Time::now();
plan.push_back(goal_copy);
}
}
//增加orientation 信息
orientation_filter_->processPath(start, plan);
}在上面的分析中,有两个核心的东西:
//计算potential
bool found_legal = planner_->calculatePotentials(costmap_->getCharMap(), start_x, start_y, goal_x, goal_y, nx * ny * 2, potential_array_);
//提取plan
getPlanFromPotential(start_x, start_y, goal_x, goal_y, goal, plan)计算potential,调用的是:
Expander::virtual bool calculatePotentials(unsigned char* costs, double start_x, double start_y, double end_x, double end_y,int cycles, float* potential) = 0;其实现有两种:
class AStarExpansion : public Expander
class DijkstraExpansion : public Expander 而后面的提取plan,调用的是:
Traceback::virtual bool getPath(float* potential, double start_x, double start_y, double end_x, double end_y, std::vector<std::pair<float, float> >& path) = 0;这是一个纯虚函数,实现有两种:
class GradientPath : public Traceback
class GridPath : public Traceback 噢噢,接下来就到算法核心部分了,关于这四种算法的具体分析是怎么实现:
A*, Dijkstra,gradient_path, grid_path 。
A*算法:
bool AStarExpansion::calculatePotentials(unsigned char* costs, double start_x, double start_y, double end_x, double end_y,
int cycles, float* potential)
{
queue_.clear();
int start_i = toIndex(start_x, start_y);
queue_.push_back(Index(start_i, 0));//push the start point into queue_
std::fill(potential, potential + ns_, POT_HIGH);//initial all the potential as very large value
potential[start_i] = 0;//initial the start position at potential as 0
int goal_i = toIndex(end_x, end_y);
int cycle = 0;
while (queue_.size() > 0 && cycle < cycles)
{
Index top = queue_[0];//get the Index that with mini cost
std::pop_heap(queue_.begin(), queue_.end(), greater1());//build the heap sort
queue_.pop_back();//remove the Index with mini cost
int i = top.i;//the Index's i from (i,cost)
if (i == goal_i)//stop condition
return true;
//add the neighborhood 4 points into the search scope
add(costs, potential, potential[i], i + 1, end_x, end_y);
add(costs, potential, potential[i], i - 1, end_x, end_y);
add(costs, potential, potential[i], i + nx_, end_x, end_y);
add(costs, potential, potential[i], i - nx_, end_x, end_y);
}
return false;
}
void AStarExpansion::add(unsigned char* costs, float* potential, float prev_potential, int next_i, int end_x,int end_y)
{
if (potential[next_i] < POT_HIGH)//it means the potential cell has been explored
return;
if(costs[next_i]>=lethal_cost_ &&
!(unknown_ && costs[next_i]==costmap_2d::NO_INFORMATION))//it means this cell is obstacle
return;
// compute the next_i cell in potential
// costs[next_i] + neutral_cost_:original cost + extra cost
// potential[next_i] means the cost from start to current
potential[next_i] = p_calc_->calculatePotential(potential, costs[next_i] + neutral_cost_, next_i, prev_potential);
int x = next_i % nx_, y = next_i / nx_;
float distance = abs(end_x - x) + abs(end_y - y);
//distance * neutral_cost_ means the current to the target
//f(n)=g(n)+h(n)
queue_.push_back(Index(next_i, potential[next_i] + distance * neutral_cost_));
std::push_heap(queue_.begin(), queue_.end(), greater1());//sort about the previous insert element
}而这行potential[next_i] = p_calc_->calculatePotential(potential, costs[next_i] + neutral_cost_, next_i, prev_potential);的调用是:
virtual float calculatePotential(float* potential, unsigned char cost, int n, float prev_potential=-1)
{
if(prev_potential < 0)
{
// get min of neighbors
float min_h = std::min( potential[n - 1], potential[n + 1] ),
min_v = std::min( potential[n - nx_], potential[n + nx_]);
prev_potential = std::min(min_h, min_v);
}
return prev_potential + cost;
}通过设置的代价potential[next_i] + distance * neutral_cost_ 代表了A*的核心思想,寻找距离start和goal代价距离都最少的点。
A* 算法是策略寻路,不保证一定是最短路径。
Dijkstra 算法是全局遍历,确保运算结果一定是最短路径。
Dijkstra 需要载入全部数据,遍历搜索。
ROS的DijkstraExpansion实现,代码明显不如A*的实现优雅,还使用了宏定义函数,额,所以暂时放一放吧。
然后来看grid_path的实现:
bool GridPath::getPath(float* potential, double start_x, double start_y, double end_x, double end_y, std::vector<std::pair<float, float> >& path) {
std::pair<float, float> current;
current.first = end_x;
current.second = end_y;
int start_index = getIndex(start_x, start_y);
path.push_back(current);
int c = 0;
int ns = xs_ * ys_;
while (getIndex(current.first, current.second) != start_index) {
float min_val = 1e10;
int min_x = 0, min_y = 0;
for (int xd = -1; xd <= 1; xd++) {
for (int yd = -1; yd <= 1; yd++) {
if (xd == 0 && yd == 0)
continue;
int x = current.first + xd, y = current.second + yd;
int index = getIndex(x, y);
if (potential[index] < min_val) {
min_val = potential[index];
min_x = x;
min_y = y;
}
}
}
if (min_x == 0 && min_y == 0)
return false;
current.first = min_x;
current.second = min_y;
path.push_back(current);
if(c++>ns*4){
return false;
}
}
return true;
}
这个算法很好理解,首先将goal所在的点的(x,y)塞到path,然后搜索当前的点的四周的四个临近点,选取这四个临近点的potential的值最小的点min,然后把这点塞到path,然后再将当前点更新为min这点,由于start 点的potential的值是0,所以这是个梯度下降的方法。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









