







#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/dnn/dnn.hpp"
#include "opencv2/ml/ml.hpp"
#include "opencv2/objdetect/objdetect.hpp"
#include <string>
#include <iostream>
#include <stdio.h>
#include <time.h>
#include <vector>
int main(int argc,char* argv[]){
//init time param
clock_t t_start,t_end;
//init dnn
cv::Ptr<cv::dnn::Importer> importer;
std::string modelTxt = "./deploy.prototxt";
std::string modelBin = "./googlenet_finetune_web_car_iter_10000.caffemodel";
importer = cv::dnn::createCaffeImporter(modelTxt,modelBin);
if(!importer){
std::cerr << "Can't load network by using the following files: " << std::endl;
std::cerr << "prototxt: " << modelTxt << std::endl;
std::cerr << "caffemodel: " << modelBin << std::endl;
exit(-1);
}
cv::dnn::Net net;
importer->populateNet(net);
importer.release();
//init cascades
std::string cascadeModel = "./cars.xml";
cv::CascadeClassifier cascade;
if( !cascade.load(cascadeModel) ){
std::cerr << "Can't load cascade model:" << std::endl;
std::cerr << "cascade: " << cascadeModel << std::endl;
exit(-1);
}
cv::Mat frame;
char image_path[32];
//int i = atoi(argv[1]);
for(int i=1;i<=1700;i++){
t_start = clock();
sprintf(image_path,"/home/xyl/caffe/lesson4/cars_input/cars_input/in%06d.jpg",i);
std::cout<<image_path<<std::endl;
frame = cv::imread(image_path);
std::vector<cv::Rect> cars;
cascade.detectMultiScale(frame,cars,1.1,2,0);
for(int j=0;j<cars.size();j++){
cv::Mat car_candidate = frame(cars[j]);
cv::resize(car_candidate,car_candidate,cv::Size(224,224));
cv::dnn::Blob inputBlob = cv::dnn::Blob(car_candidate);
net.setBlob(".data",inputBlob);
net.forward();
cv::dnn::Blob prob = net.getBlob("prob");
cv::Mat probMat = prob.matRefConst().reshape(1,1);
double classProb;
cv::minMaxLoc(probMat,NULL,&classProb);
char temp[10];
sprintf(temp, "%lf", classProb);
std::string s(temp);
cv::putText(frame,s,cv::Point(cars[j].x,cars[j].y-10),cv::FONT_HERSHEY_SCRIPT_SIMPLEX,0.5,cv::Scalar::all(255),1,8);
cv::rectangle(frame,cars[j],cv::Scalar(255,0,0));
}
t_end = clock();
//show processing time
std::cout<<"time:"<<double(t_end-t_start)/CLOCKS_PER_SEC<<std::endl;
//show result
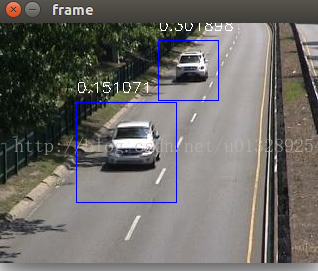
cv::imshow("frame",frame);
cv::waitKey(1);
} //--end for loop
}运行之后,结果是这样的:















 992
992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









