







0、内容提要
这篇博客想试图证明卡尔曼滤波器(KALMAN FILTER),即就是说明KF(KALMAN FILTER)和EKF(EXTENDED KALMAN FILTER)算法中的步奏是怎么来的,为什么是这样的。
1. 卡尔曼滤波器(KALMAN FILTER)的数学原理
2. 扩展卡尔曼滤波器(EXTENDED KALMAN FILTER)简介
1、卡尔曼滤波器(KALMAN FILTER)的数学原理
1.1、多元正太分布和贝叶斯公式
在KF和EKF的证明中用到了贝叶斯公式和多元正太分布,下面我们简单回顾:
首先是贝叶斯公式:

由于
p(y)
并不是依赖于
x
的变量,所以我们就可将

再看看多因素的贝叶斯公式

贝叶斯公式是后验概率,那么他的全概率公式就是:

但是上面个这个式子(2.24)并不能暗示任何概率独立的信息,即就是它推不出独立,独立也推不出它:


再来看看多元正态分布,他的表达式如下:

其中均值为 μ ,协方差矩阵为 ∑
1.2、卡尔曼滤波器描述
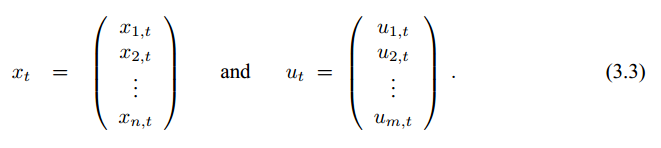
在这里我们简单的再说说卡尔曼滤波器的模型假设和算法步奏,一边更好的理解推导过程。下面分别介绍卡尔曼滤波器的过程模型和观察模型,过程模型主要描述的是相邻时刻状态转移关系。

公式中的
xt
是
t
时刻的状态向量,
由于 At,Bt 是矩阵,那么就可与正太分布相加,那么就可以得到 xt 的条件概率密度:

观察模型描述的是状态与观察结果之间的关系:

其中,
zt
是一个
k
维向量,

最后我们再给出卡尔曼滤波器的算法描述:
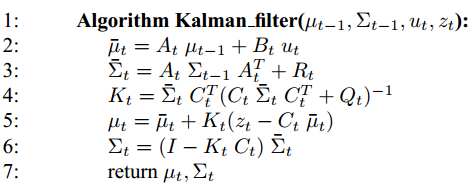
可以看出卡尔曼滤波器算法是一个递归算法,那么他的第一状态向量怎么得到?

这就第一个状态向量的概率密度,服从 N(μ0,∑0) ,后面的证明中 bel(x)=p(x) 。
1.3、数学证明
卡尔曼滤波器算法步奏可以分成三部分,2、3行是预测部分,4行是求卡尔曼增益部分,5、6行是修正部分。下面我们以此证明这三个部分:
Part 1:预测,在证明过程中变量头顶有横线的都表示预测。首先利用全概率公式得到,
t
时刻的状态概率表达式:

将其展开:

下面是他的简写形式:

其中:

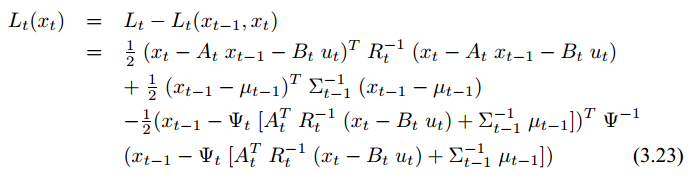
将

与 xt−1 有关的都包含在了 Lt(xt−1,xt) 中,有 Lt(xt) 无关,我们就可以将它移动到积分号外面:
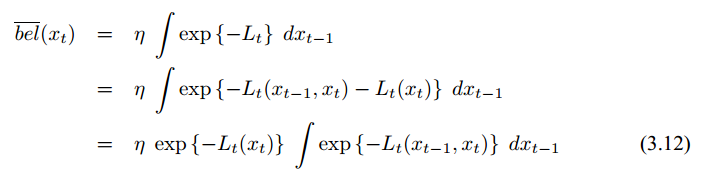
积分是一个常数,我们既可以将它包含到参数 η 中。则上式就可以进一步简化:

下面分别对 Lt 进行一阶导和二阶导:


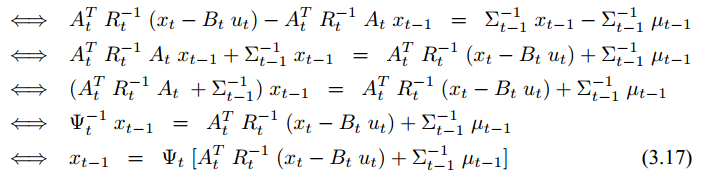
上式中, =: 表示记做。令一阶导数为零:

求解 xt−1 :
那么我们就可得到 Lt(xt−1,xt) 的表达式(这个我也没太看懂):

在将它带回高斯分布密度函数:

概率密度函数求和为1

移项之后:

可以看出这是一个与 xt 无关的量,那么:

中的 η 含有的与上式后面积分项有关的部分为常数。再利用前面的分解式(3.11)得到 Lt(xt) 的表达式:
用 Lt 的二阶导代替掉 Ψ ,参看(3.15)。其中 xt−1 的一次项下划线为单线,二次项为双线。
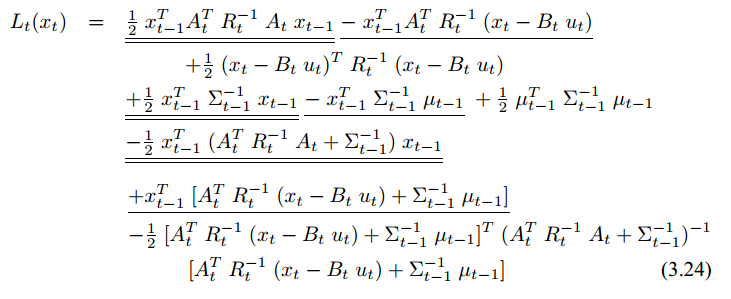
上式是关于 xt 的函数,又由于他对应的高斯分布使用了参数 η ,所以可以将关于 xt−1 的项直接删除掉。

在对其求导:
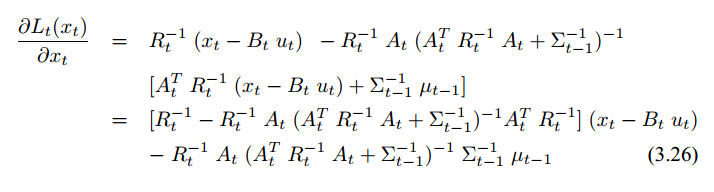
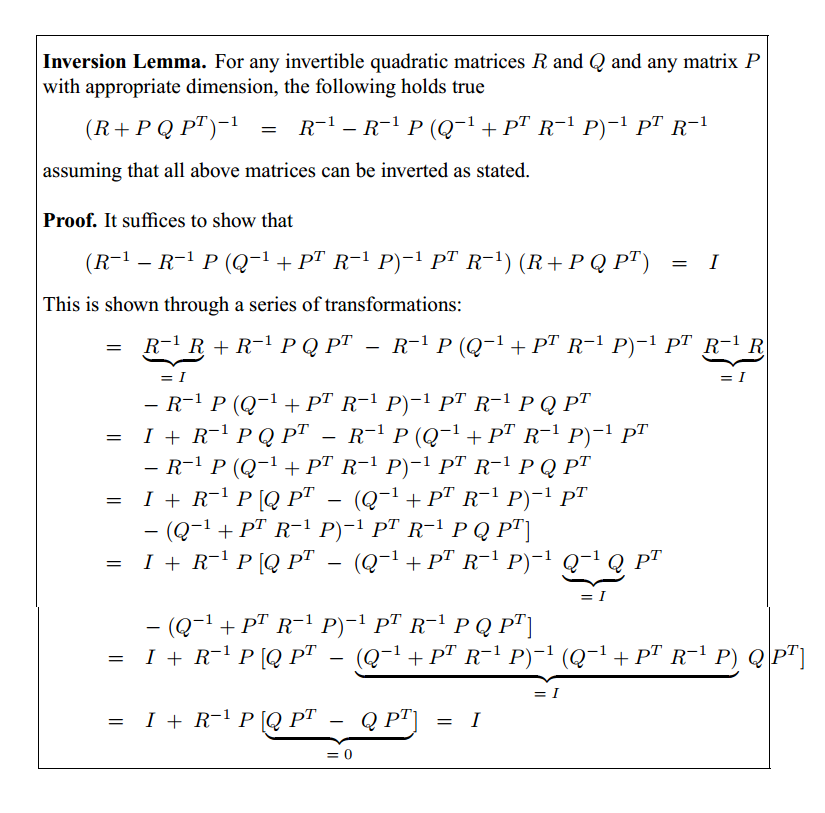
对上式使用Inversion Lemma:

下面是Inversion Lemma的证明:
令 Lt(xt) 的一阶导为零:

解得 xt :
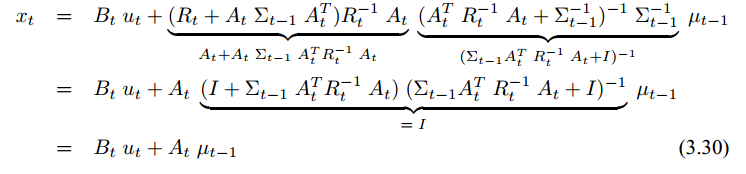
这样我们就证明了算法的第2行。在对 Lt(xt) 求二阶导:

这是 Lt(xt) 的曲率,所以它的转置就是 bel¯¯¯¯(xt) 的协方差矩阵。这样我们就证明算法的第3行。
part 2:卡尔曼增益和参数修正。根据观察模型可得:

做如下简写:

其中:

并对 Jt 求一阶导和二阶导:

Jt 的二阶导数就是 bel(xt) 的协方差矩阵:

令 Jt 一阶导数为零:

对上式左端项进行凑项,然后使用分配率:

将上式带回(3.38)式:

因此:

现在定义卡尔曼增益:

便可以从(3.41)中解得:

这就证明了算法的第5行。下面给变换卡尔曼增益 Kt 的形式,使其方便的融入算法流程中:
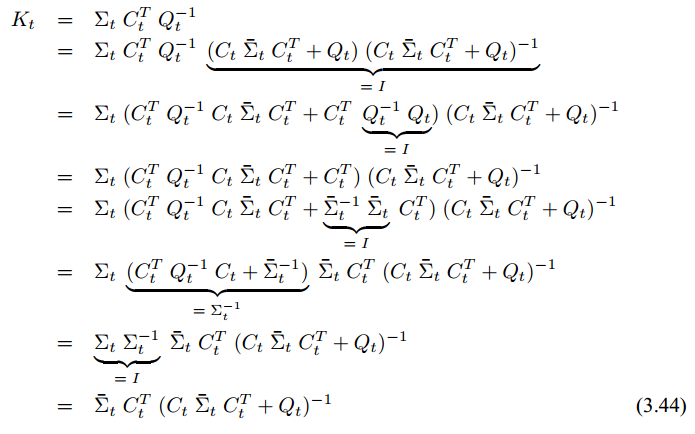
这就证明了算法的第4行。最后再将(3.37)使用Inversion Lemma进一步变形:
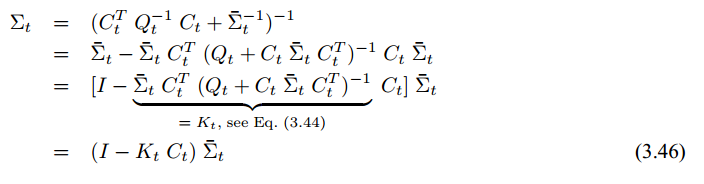
至此我们就从数学上严格的证明了卡尔曼滤波器算法。
2、扩展卡尔曼滤波器(EXTENDED KALMAN FILTER)简介
卡尔曼滤波器是线性算法,我们可定想将它推广到非线性。下面给是EKF的描述:
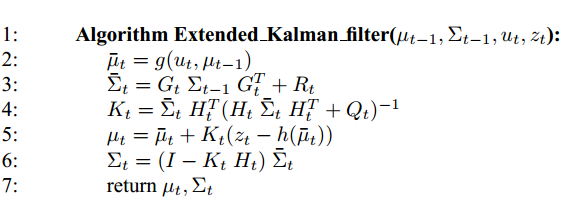
他的证明与卡尔曼滤波器类似。
3、参考文献
Probabilistic Robotics http://download.csdn.net/detail/a_cainiao_a/9447292
end














 534
534











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









