







自己添加头文件把
// HOGDescriptor visual_imagealizer
// adapted for arbitrary size of feature sets and training images
Mat get_hogdescriptor_visual_image(Mat& origImg,
vector<float>& descriptorValues,
Size winSize,
Size cellSize,
int scaleFactor,
double viz_factor)
{
Mat visual_image;
resize(origImg, visual_image, Size(origImg.cols*scaleFactor, origImg.rows*scaleFactor));
int gradientBinSize = 9;
// dividing 180° into 9 bins, how large (in rad) is one bin?
float radRangeForOneBin = 3.14/(float)gradientBinSize;
// prepare data structure: 9 orientation / gradient strenghts for each cell
int cells_in_x_dir = winSize.width / cellSize.width;
int cells_in_y_dir = winSize.height / cellSize.height;
int totalnrofcells = cells_in_x_dir * cells_in_y_dir;
float*** gradientStrengths = new float**[cells_in_y_dir];
int** cellUpdateCounter = new int*[cells_in_y_dir];
for (int y=0; y<cells_in_y_dir; y++)
{
gradientStrengths[y] = new float*[cells_in_x_dir];
cellUpdateCounter[y] = new int[cells_in_x_dir];
for (int x=0; x<cells_in_x_dir; x++)
{
gradientStrengths[y][x] = new float[gradientBinSize];
cellUpdateCounter[y][x] = 0;
for (int bin=0; bin<gradientBinSize; bin++)
gradientStrengths[y][x][bin] = 0.0;
}
}
// nr of blocks = nr of cells - 1
// since there is a new block on each cell (overlapping blocks!) but the last one
int blocks_in_x_dir = cells_in_x_dir - 1;
int blocks_in_y_dir = cells_in_y_dir - 1;
// compute gradient strengths per cell
int descriptorDataIdx = 0;
int cellx = 0;
int celly = 0;
for (int blockx=0; blockx<blocks_in_x_dir; blockx++)
{
for (int blocky=0; blocky<blocks_in_y_dir; blocky++)
{
// 4 cells per block ...
for (int cellNr=0; cellNr<4; cellNr++)
{
// compute corresponding cell nr
int cellx = blockx;
int celly = blocky;
if (cellNr==1) celly++;
if (cellNr==2) cellx++;
if (cellNr==3)
{
cellx++;
celly++;
}
for (int bin=0; bin<gradientBinSize; bin++)
{
float gradientStrength = descriptorValues[ descriptorDataIdx ];
descriptorDataIdx++;
gradientStrengths[celly][cellx][bin] += gradientStrength;
} // for (all bins)
// note: overlapping blocks lead to multiple updates of this sum!
// we therefore keep track how often a cell was updated,
// to compute average gradient strengths
cellUpdateCounter[celly][cellx]++;
} // for (all cells)
} // for (all block x pos)
} // for (all block y pos)
// compute average gradient strengths
for (int celly=0; celly<cells_in_y_dir; celly++)
{
for (int cellx=0; cellx<cells_in_x_dir; cellx++)
{
float NrUpdatesForThisCell = (float)cellUpdateCounter[celly][cellx];
// compute average gradient strenghts for each gradient bin direction
for (int bin=0; bin<gradientBinSize; bin++)
{
gradientStrengths[celly][cellx][bin] /= NrUpdatesForThisCell;
}
}
}
cout << "descriptorDataIdx = " << descriptorDataIdx << endl;
// draw cells
for (int celly=0; celly<cells_in_y_dir; celly++)
{
for (int cellx=0; cellx<cells_in_x_dir; cellx++)
{
int drawX = cellx * cellSize.width;
int drawY = celly * cellSize.height;
int mx = drawX + cellSize.width/2;
int my = drawY + cellSize.height/2;
rectangle(visual_image,
Point(drawX*scaleFactor,drawY*scaleFactor),
Point((drawX+cellSize.width)*scaleFactor,
(drawY+cellSize.height)*scaleFactor),
CV_RGB(100,100,100),
1);
// draw in each cell all 9 gradient strengths
for (int bin=0; bin<gradientBinSize; bin++)
{
float currentGradStrength = gradientStrengths[celly][cellx][bin];
// no line to draw?
if (currentGradStrength==0)
continue;
float currRad = bin * radRangeForOneBin + radRangeForOneBin/2;
float dirVecX = cos( currRad );
float dirVecY = sin( currRad );
float maxVecLen = cellSize.width/2;
float scale = viz_factor; // just a visual_imagealization scale,
// to see the lines better
// compute line coordinates
float x1 = mx - dirVecX * currentGradStrength * maxVecLen * scale;
float y1 = my - dirVecY * currentGradStrength * maxVecLen * scale;
float x2 = mx + dirVecX * currentGradStrength * maxVecLen * scale;
float y2 = my + dirVecY * currentGradStrength * maxVecLen * scale;
// draw gradient visual_imagealization
line(visual_image,
Point(x1*scaleFactor,y1*scaleFactor),
Point(x2*scaleFactor,y2*scaleFactor),
CV_RGB(0,0,255),
1);
} // for (all bins)
} // for (cellx)
} // for (celly)
// don't forget to free memory allocated by helper data structures!
for (int y=0; y<cells_in_y_dir; y++)
{
for (int x=0; x<cells_in_x_dir; x++)
{
delete[] gradientStrengths[y][x];
}
delete[] gradientStrengths[y];
delete[] cellUpdateCounter[y];
}
delete[] gradientStrengths;
delete[] cellUpdateCounter;
return visual_image;
}
int main()
{
HOGDescriptor hog;
hog.winSize=Size(80,128);
vector<float> des;
Mat src = imread("d:/1.jpg");
Mat dst ;
resize(src,dst,Size(80,128));
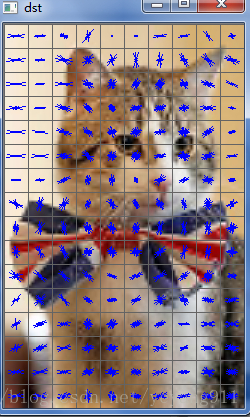
imshow("src",src);
hog.compute(dst,des);
Mat d = get_hogdescriptor_visual_image(dst,des,hog.winSize,hog.cellSize,3,2.0);
imshow("dst",d);
waitKey();
return 0;
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









