






作者:Frank
转载请注明出处
一直没时间写博客,最近抽时间写了些关于在ORB_SLAM2在Android上的移植过程,也算是点经验吧。
写完后一个手贱点了个链接,瞬间1/3工作量没了,深夜弄完也是醉了。。。
正文开始
这篇博客讲述如何在Android平台上移植ORB_SLAM2,讲述过程包括基本的Android环境的搭建和NDK环境的配置,Android下移植的基本概念,ORB的具体移植步骤等。
Android平台搭建和NDK环境配置
系统:windows7 32bit
IDE:Eclipse Luna
环境工具: ADT24.0.2、Android SDK、NDK r10b
PS:不推荐使用集成了ADT环境的Eclipse版本,因为在NDK编译的时候可能会报各种莫名其妙的错。同时默认JDK环境已经装好。
组件下载地址:百度网盘(包括ADT、NDK。SDK太大,请自行下载)
步骤:
- 安装Eclipse,注意区分Eclipse是32位还是64位的,下载对应版本安装即可。下载地址在前面给出。
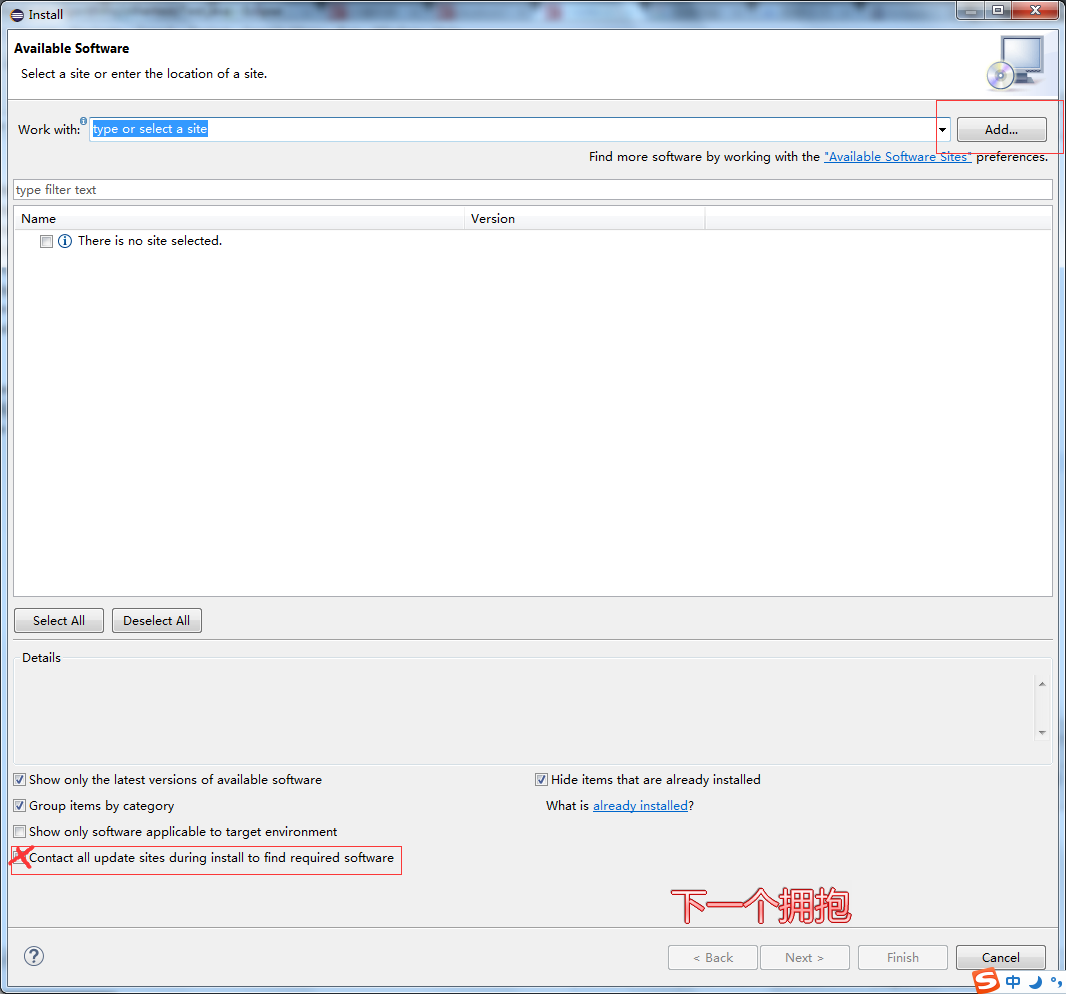
- 下载ADT,不需要解压。打开安装好的Eclipse,在菜单栏点击Help–>Install new software,弹出如下界面:
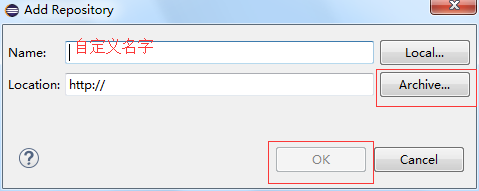
点击右上角Add,出现:
第一栏随便填个名字,例如ADT,第二栏点击Archive,选择你下载的ADT压缩包,确定。在出现的列表中,全部选中,并取消勾选Contact all update sites….。点击next,则开始了ADT的安装,大概需要10分钟。可能还需要accept 协议什么的,这里略过不表。安装完成后提示重启Eclipse即安装成功。- 下载Android SDK,并解压(路径不要有中文)。在Eclipse中选择Window–>preferences。在左边栏选中Android,在SDK Location中填入你解压文件夹的根目录,点击apply和OK,则Android环境配置基本完成。这是你的菜单栏应该有了这两项
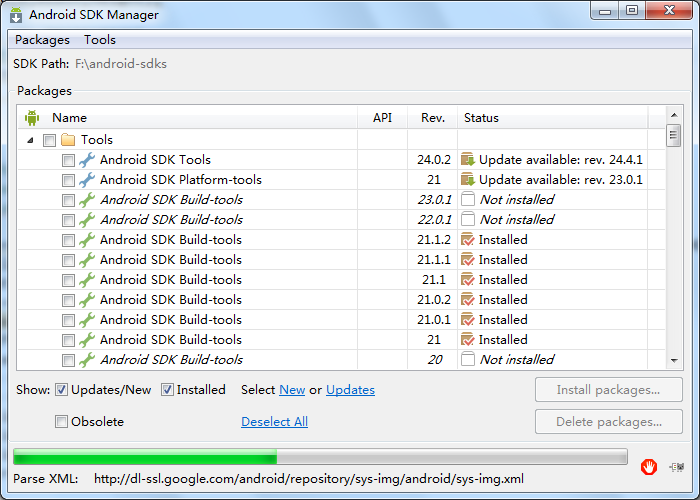
- 更新SDK。点击Window–>Android SDK manager,弹出如下界面:
可能由于墙的问题会弹出列表无法加载,需要用代理或镜像,当然如果你有梯子也可以。这里介绍些镜像吧:
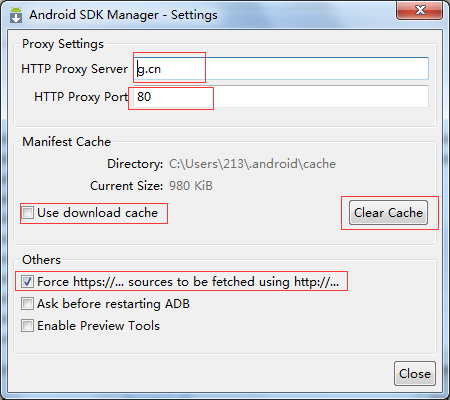
g.cn:80,在SDK Manager 中点击tools–>options:
按照上图设置即可。其他的镜像源还有北京化工大学镜像站,请自行谷狗。设置好后点击Packages–>reload即可得到对应的镜像。有默认选中的一些选项,一般选中一个sdk tools,一份sdk build-platform-tools,一个sdk build tools,然后一个Android版本即可(一般4.0以上)。选中后点击Install就会从镜像中下载对应的SDK,这个过程有长有短,视网络而定。
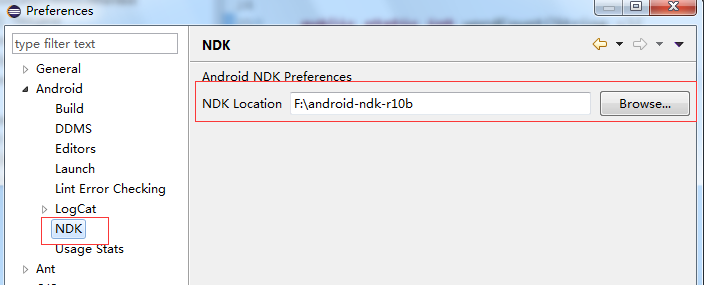
当上述步骤都完成后,Android开发环境就配置好了。 - NDK环境配置:从上面给的百度网盘中下载ndk,解压(规则同sdk),打开Eclipse,点击Window–>Preferences,选择Android–>NDK,在右边界面中填入NDK Location即可。

Android移植基础
NDK是集成的Android中调用C++代码的工具包,核心是JNI(Java Native Interface)技术,具体这里略过不表。只说说NDK开发的基本步骤:
1. 编写Java代码:在Java中定义一个类,比如说叫NDKHelper吧,里面定义几个java的方法,只需要声明,不需要实现,如下所示:
public class NDKHelper {
//NDK示例方法1
public static native void ndkOne(int a,long b);
//NDK示例方法2
public static native int ndkTwo(String a,String b);
}native标识符表示该函数将会利用C++代码完成实现。
接下来在工程上右键,Android Tools–>Add native support,出现如下界面:
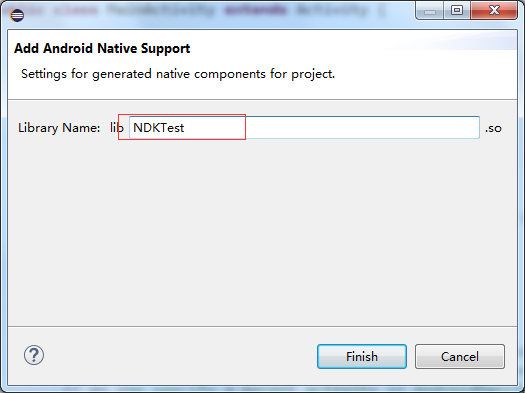
名字就是最后我们要生成的库的名字,随便填,可修改。点击确定就会给你的工程添加C++编译支持,菜单栏会多了个小锤子:

这个是用来编译C++的快捷键。在你的工程目录下会新建jni目录和obj目录,其中jni目录用来存放和C++代码有关的东西,obj则存放C++进行编译时产生的中间件,最后生成的library会写入到libs文件夹下。
在jni文件夹中生成了如下文件,一个.cpp,一个Android.mk,其中.cpp是自动生成的,是用来编写C++部分的,而Android.mk类似C++里面的CMakeList,用来指定需要编译的文件和编译生成的模块名,一个最简单的Android.mk文件如下所示:
LOCAL_PATH := $(call my-dir)
include $(CLEAR_VARS)
LOCAL_MODULE := NDKTest
LOCAL_SRC_FILES := NDKTest.cpp
include $(BUILD_SHARED_LIBRARY)LOCAL_PATH :=$(call my-dir)表示包含当前目录。
include $(CLEAR_VARS)表示清除全部非系统变量和部分系统变量;
LOCAL_MODULE := NDKTest 表示当前生成的模块名,最终会生成libNDKTest.so文件
LOCAL_SRC_FILES := NDKTest.cpp 表示当前需要编译的cpp文件;
include $(BUILD_SHARED_LIBRARY) 表示生成共享库,需要生成静态库请修改成BUILD_STATIC_LIBRARY。
其他基础命令:
LOCAL_C_INCLUDES:= 表示添加头文件进入编译环境
LOCAL_LDLIBS:= 表示添加系统静态库
LOCAL_SHARED_LIBRARIES:= 表示添加共享库
其他命令请自行查看API文档。
这里指定了进行编译时的各项条件,如果需要指定编译器版本和编译目标平台等信息,则需要在jni目录下新建Application.mk文件,基本语句如下:
APP_STL := gnustl_static
APP_CPPFLAGS := -frtti -fexceptions
NDK_TOOLCHAIN_VERSION := 4.8
APP_ABI :=armeabi-v7aAPP_STL :=表示使用stl库,APP_CPPFLAGS表示一些CPP编译参数,NDK_TOOLCHAIN_VERSION 表示NDK使用的编译器版本,APP_ABI表示编译的目标平台,可以指定多个平台,平台之间用空格隔开,或者指定all则为全平台编译(armeabi,armeabi-v7a,mips,x86)。其他命令请自行查看API。
接下来编写对应的C++文件。
打开eclipse,点击Project–>build Project(若build automatically已勾选则会自动编译)打开命令行,cd到你的工程文件夹下的bin–>classes文件夹下,输入如下命令:

javah com.example.ndktest.NDKHelper回车,则在你的classes文件夹下会生成对应的头文件。这里com.example.ndktest是你的package名字,NDKHelper是你的NDK函数的类名。
生成的头文件如下:
/* DO NOT EDIT THIS FILE - it is machine generated */
#include <jni.h>
/* Header for class com_example_ndktest_NDKHelper */
#ifndef _Included_com_example_ndktest_NDKHelper
#define _Included_com_example_ndktest_NDKHelper
#ifdef __cplusplus
extern "C" {
#endif
/*
* Class: com_example_ndktest_NDKHelper
* Method: ndkOne
* Signature: (IJ)V
*/
JNIEXPORT void JNICALL Java_com_example_ndktest_NDKHelper_ndkOne
(JNIEnv *, jclass, jint, jlong);
/*
* Class: com_example_ndktest_NDKHelper
* Method: ndkTwo
* Signature: (Ljava/lang/String;Ljava/lang/String;)I
*/
JNIEXPORT jint JNICALL Java_com_example_ndktest_NDKHelper_ndkTwo
(JNIEnv *, jclass, jstring, jstring);
#ifdef __cplusplus
}
#endif
#endif
其他不用管,我们关注中间的两个函数声明:
JNIEXPORT void JNICALL Java_com_example_ndktest_NDKHelper_ndkOne(JNIEnv *, jclass, jint, jlong);这个函数就是NDKHelper类中ndkOne函数对应的C++版本,其中JNIEXPORT和JNICALL是固定字段,void是函数返回值,函数名由Java字段+包名+类名+函数名组成,参数则多了几个JNI的系统参数JNIEnv 和jclass,其他的就是NDKHelper类中的对应参数,ndk会对该函数进行解析和链接,实现java和C++的对接。
将生成的.h头文件复制到jni目录下,新建对应的cpp文件,将该头文件include进来并对对应函数进行实现,实现过程就视函数功能而定。
这些工作完成后需要修改你的Android.mk文件,将刚刚新建的cpp和h文件包括进来。
然后点击开始那个小锤子或者直接项目右键RunAs–>Android Application,则C++部分会开始编译,编译具体过程可以在Eclipse下方Console窗口看到(如果没有Console窗口则点击Window–>Show Views,选择Console确定即可)。
编译完成后会生成对应的库存放在libs目录下,则你可以开始在Java里面调用刚才定义的ndkOne和ndkTwo函数实现具体的功能。
NDK基础到此为止,更深入的学习可以下载Android官方给的ndk samples.
ORB_SLAM2的移植
不想知道移植过程的童鞋可以直接下载我的Github源码:https://github.com/FangGet/ORB_SLAM2_Android 直接按照步骤进行即可。
移植过程
先看目录:
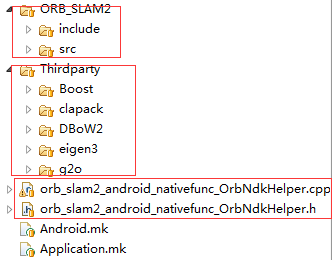
分为ORB和ThirdParty,其中ThirdParty包括boost clapack DBow2 g2o eigen3。
clapack和eigen来自于一个github的开源库:https://github.com/simonlynen/android_libs 这里集成了一些经典的C++库的ndk版本,下载即可使用。g2o和DBoW2则来自于ORB_SLAM2原作者的github地址,Boost是自己编译的lib,这里只介绍clapack和opencv的库配置。
clapack配置
从前述的开源库中将clapack目录拷贝到Thirdparty的对应目录下,clapack中已经包含了对当前目录极其子目录的编译过程,我们在jni目录下的Android.mk文件中加入如下内容:
include $(CLEAR_VARS)
MAINDIR:= $(LOCAL_PATH)
include $(MAINDIR)/Thirdparty/clapack/Android.mk
LOCAL_PATH := $(MAINDIR)
include $(CLEAR_VARS)
MAINDIR:= $(LOCAL_PATH)
LOCAL_MODULE:= lapack
LOCAL_SHORT_COMMANDS := true
LOCAL_STATIC_LIBRARIES := tmglib clapack blas f2c
LOCAL_EXPORT_C_INCLUDES := $(LOCAL_C_INCLUDES)
LOCAL_PATH := $(MAINDIR)
include $(BUILD_SHARED_LIBRARY)这里的基本命令之前都已经讲过了,只补充如下几点内容:
- LOCAL_SHORT_COMMANDS是为了防止Windows对g++编译命令长度的限制而设置的参数,该参数会拖慢整个编译过程,因此请谨慎使用;
- LOCAL_EXPORT_C_INCLUDES表示将当前库的头文件EXPORT给系统,让程序代码中能实现<>的调用过程,若不设置这一参数则在cpp文件中可能无法引用该库;
- LOCAL_STATIC_LIBRARIES := tmglib clapack blas f2c是引用lapack子目录中编译好的一些依赖模块
这里会编译出一个名为lapack的库工程,该工程就可以作为依赖项被ORB所引用。
OpenCV的编译
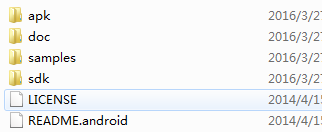
opencv4Android是opencv官网为了对Android的支持而推出的一个工具集,可以在opencv官网进行下载。其目录结构如下:
其中sdk为核心部分,opencv4Android包含两个版本,一个是opencv为java做的本地化sdk,另一个是opencv利用ndk编译C++版本得到的库工程。我们将opencv4android解压后放置到ORB_SLAM2项目的同级目录下,如下所示:
之后在jni目录下的Android.mk中需要引用到OpenCV的地方加入如下代码:

OPENCV_LIB_TYPE:=STATIC
ifeq ("$(wildcard $(OPENCV_MK_PATH))","")
#try to load OpenCV.mk from default install location
include E:/ORB_SLAM2/OpenCV-2.4.9-android-sdk/sdk/native/jni/OpenCV.mk
else
include $(OPENCV_MK_PATH)
endif 这里opencv.mk我给的是绝对地址,其实相对地址也是可以的。上面这段引用会将opencv进行编译并引入到当前的工作模块上来,这里就完成了opencv库的基本调用。如果为了方便还可以将opencv自身单独编译成一个库工程并开放给其他模块引用。
其他libraries的编译过程和上述工程大同小异,其主要步骤可以概括如下:
- 将当前库复制到jni的特定目录下;
- 在Android.mk中新建一个模块并对模块进行命名;
- LOCAL_C_INCLUDE引入库的头文件,LOCAL_SRC_FILES引入库的cpp文件;
- LOCAL_LDLIBS/LOCAL_SHARED_LIBRARIES/LOCAL_STATIC_LIBRARIES引入依赖库;
- LOCAL_C_FLAGS设置编译参数;
ORB_SLAM2的编译
这里我们将ORB_SLAM2的源文件也编译为一个library以供调用,其编译过程和上面雷同,需要注意的是,由于pangolin编译有问题,我拆了源文件的pangolin部分并注释了对应的部分代码,同时引入了opengl es 来进行map和pose的绘制。同时,为了完成特征检测图像的回调,我改变了System.cc中TrackMonocular的返回值,将其返回值改成了Mat。
当上述过程完成后,我们的C++编译工作就基本完成了,最后也是最重要的一步是为Java中定义的native方法做C++的实现,在JAVA中,我定义了如下native函数:
/**
* jni中初始化SLAM系统
* @param VOCPath
* @param calibrationPath
*/
public static native void initSystemWithParameters(String VOCPath,String calibrationPath);
/**
* Dataset模式中ORB系统的start函数
* @param curTimeStamp
* @param data
* @param w
* @param h
* @return
*/
public static native int[] startCurrentORB(double curTimeStamp,int[] data,int w,int h);
/**
* Camera模式中ORB系统的start
* @param curTimeStamp
* @param addr
* @param w
* @param h
* @return
*/
public native static int[] startCurrentORBForCamera(double curTimeStamp,long addr,int w,int h);
/**
* Opengl es 的初始化
*/
public native static void glesInit();
/**
* opengl es绘制更新
*/
public native static void glesRender();
/**
* 防止opengl es窗口resize带来的影响
* @param width
* @param height
*/
public native static void glesResize(int width, int height);其对应的C++代码为:
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: initSystemWithParameters
* Signature: (Ljava/lang/String;Ljava/lang/String;)V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_initSystemWithParameters
(JNIEnv * env, jclass cls, jstring VOCPath, jstring calibrationPath) {
const char *calChar = env->GetStringUTFChars(calibrationPath, JNI_FALSE);
const char *vocChar = env->GetStringUTFChars(VOCPath, JNI_FALSE);
// use your string
std::string voc_string(vocChar);
std::string cal_string(calChar);
env->GetJavaVM(&jvm);
jvm->AttachCurrentThread(&env, NULL);
s=new ORB_SLAM2::System(voc_string,cal_string,ORB_SLAM2::System::MONOCULAR,true);
env->ReleaseStringUTFChars(calibrationPath, calChar);
env->ReleaseStringUTFChars(VOCPath, vocChar);
init_end=true;
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: startCurrentORB
* Signature: (DDD[I)[I
*/
JNIEXPORT jintArray JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_startCurrentORB(
JNIEnv * env, jclass cls, jdouble curTimeStamp, jintArray buf, jint w,
jint h) {
jint *cbuf;
cbuf = env->GetIntArrayElements(buf, false);
if (cbuf == NULL) {
return 0;
}
int size = w * h;
cv::Mat myimg(h, w, CV_8UC4, (unsigned char*) cbuf);
cv::Mat ima = s->TrackMonocular(myimg, curTimeStamp);
jintArray resultArray = env->NewIntArray(ima.rows * ima.cols);
jint *resultPtr;
resultPtr = env->GetIntArrayElements(resultArray, false);
for (int i = 0; i < ima.rows; i++)
for (int j = 0; j < ima.cols; j++) {
int R = ima.at < Vec3b > (i, j)[0];
int G = ima.at < Vec3b > (i, j)[1];
int B = ima.at < Vec3b > (i, j)[2];
resultPtr[i * ima.cols + j] = 0xff000000 + (R << 16) + (G << 8) + B;
}
env->ReleaseIntArrayElements(resultArray, resultPtr, 0);
env->ReleaseIntArrayElements(buf, cbuf, 0);
return resultArray;
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: glesInit
* Signature: ()V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_glesInit
(JNIEnv *env, jclass cls) {
// 启用阴影平滑
glShadeModel(GL_SMOOTH);
// 黑色背景
glClearColor(1.0f, 1.0f, 1.0f, 0.0f);
// 设置深度缓存
glClearDepthf(1.0f);
// 启用深度测试
glEnable(GL_DEPTH_TEST);
// 所作深度测试的类型
glDepthFunc(GL_LEQUAL);
// 告诉系统对透视进行修正
glHint(GL_PERSPECTIVE_CORRECTION_HINT, GL_NICEST);
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: glesRender
* Signature: ()V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_glesRender
(JNIEnv * env, jclass cls) {
glClear (GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glMatrixMode (GL_MODELVIEW);
glLoadIdentity ();
if(init_end)
s->drawGL();
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: glesResize
* Signature: (II)V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_glesResize
(JNIEnv *env, jclass cls, jint width, jint height) {
//图形最终显示到屏幕的区域的位置、长和宽
glViewport (0,0,width,height);
//指定矩阵
glMatrixMode (GL_PROJECTION);
//将当前的矩阵设置为glMatrixMode指定的矩阵
glLoadIdentity ();
glOrthof(-2, 2, -2, 2, -2, 2);
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: readShaderFile
* Signature: (Landroid/content/res/AssetManager;)V
*/
JNIEXPORT jintArray JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_startCurrentORBForCamera
(JNIEnv *env, jclass cls,jdouble timestamp, jlong addr,jint w,jint h) {
const cv::Mat *im = (cv::Mat *) addr;
cv::Mat ima = s->TrackMonocular(*im, timestamp);
jintArray resultArray = env->NewIntArray(ima.rows * ima.cols);
jint *resultPtr;
resultPtr = env->GetIntArrayElements(resultArray, false);
for (int i = 0; i < ima.rows; i++)
for (int j = 0; j < ima.cols; j++) {
int R = ima.at < Vec3b > (i, j)[0];
int G = ima.at < Vec3b > (i, j)[1];
int B = ima.at < Vec3b > (i, j)[2];
resultPtr[i * ima.cols + j] = 0xff000000 + (R << 16) + (G << 8) + B;
}
env->ReleaseIntArrayElements(resultArray, resultPtr, 0);
return resultArray;
}这里解释下Dataset和Camera模式下start方法的区别。其实就是图像参数传递的方式不一样。在DataSet模式中,我们是用ImageView显示图片,用Bitmap读取文件中的图片,而非基本类型的数据都是不能被jni接口所接受的因此我们需要利用Bitmap的getPixels方法将其转换成int[]型数据进行传递,在jni中int[]对应的数据类型为jintArray,我们可以在获取到数据后将jintArray转换成Mat进行后续处理;而在Camera模式中我们是利用opencv android sdk中的cvCameraView 来直接进行摄像头的调用和图像的显示。其onCameraFrame(CvCameraViewFrame inputFrame)中的inputfram可以通过rgba()方法转换成Mat类型数据,而Mat类型同样不被jni识别,因此需要利用Mat的getNativeObjAddr方法获取Mat数据的long型指针传递到jni中进行处理。关键代码如下:
DataSet 的Java部分:
int w = tmp.getWidth(), h = tmp.getHeight();//其中tmp为bitmap
int[] pix = new int[w * h];
tmp.getPixels(pix, 0, w, 0, 0, w, h);C++部分:
jint *cbuf;
cbuf = env->GetIntArrayElements(buf, false);
if (cbuf == NULL) {
return 0;
}
int size = w * h;
cv::Mat myimg(h, w, CV_8UC4, (unsigned char*) cbuf);Camera的Java部分:
Mat im=inputFrame.rgba();
synchronized (im) {
addr=im.getNativeObjAddr();//addr为函数传递的图像参数
}C++部分:
const cv::Mat *im = (cv::Mat *) addr;//addr为传入的图像参数结尾
当上述步骤都完成后,我们会得到最终生成的sdk。Android部分的布局文件和对应activity文件在这里也略过不表。当得到最终生成的apk后,我们如果要测试Camera模式,需要先将opencv4Android中apk文件夹中对应类型的opencv manager安装到手机中并预先打开才能使用,否则会提示找不到opencv的支持库;若只需测试Dataset模式则无需上述步骤。
水平有限,如有错误请不吝指正,谢谢。

















 8126
8126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









