






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
移动机器人路径规划涉及的基本算法包括RRT、PRM、Dijkstra算法以及一些元启发式算法。这些算法在不同情境下被广泛应用,RRT和PRM主要用于处理复杂环境下的路径搜索,Dijkstra算法通常用于寻找最短路径。此外,一些元启发式算法如A*、遗传算法和模拟退火算法等也被引入,以进一步优化路径规划的效果。这种多样化的算法组合使得移动机器人能够在各种复杂场景中高效且安全地规划路径。
路径规划是机器人导航和自主移动的关键问题之一。栅格地图路径规划是指在离散化的地图上,机器人需要从起点到达目标点,并且需要避开障碍物。改进遗传算法是一种用于优化问题的启发式算法,适用于求解路径规划问题。
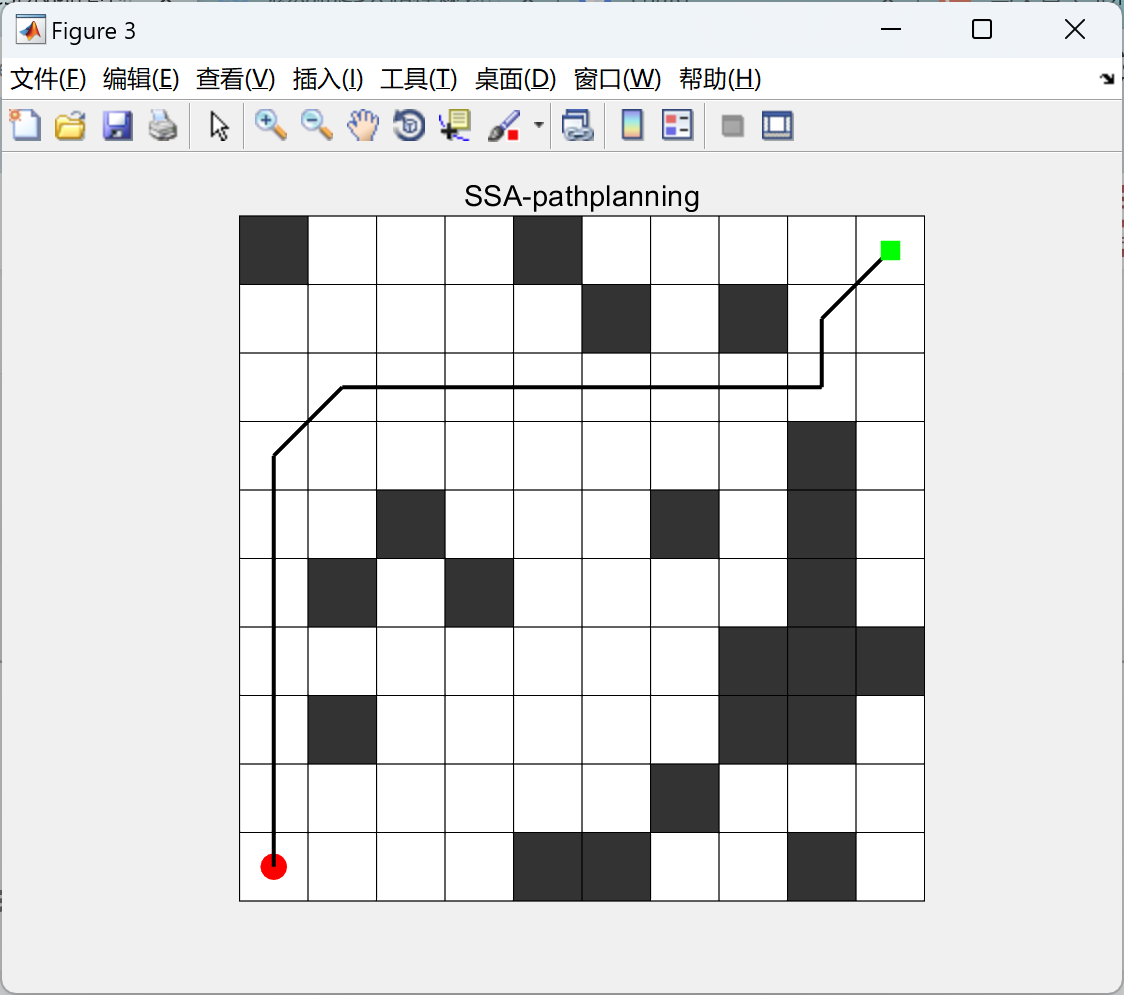
在基于改进遗传算法求解机器人栅格地图路径规划的研究中,首先需要将栅格地图进行离散化表示,将障碍物和可通行区域进行标记。然后,使用改进遗传算法来搜索最优路径,以使机器人能够安全、高效地到达目标点。
改进遗传算法通常包括选择合适的遗传操作(如选择、交叉和变异)以及适应度函数的设计。在路径规划中,适应度函数可以根据路径的长度、避障能力和平滑性等因素进行评估,以找到最优的路径。
通过基于改进遗传算法的路径规划研究,可以实现机器人在复杂环境中的自主导航和避障,提高机器人的智能水平和实际应用价值。这种方法在自动驾驶、无人机导航、仓储机器人等领域都具有重要的应用前景。
📚2 运行结果
部分代码:
CaseToBeRun = 17;
if CaseToBeRun == 1
run('./TestCase_1/RRT.m');
saveas(gcf,'../results/RRT','png');
elseif CaseToBeRun == 2
run('./TestCase_2/RRTconnect.m');
saveas(gcf,'../results/RRTconnect','png');
elseif CaseToBeRun == 3
run('./TestCase_3/RRTstar.m');
saveas(gcf,'../results/RRTstar','png');
elseif CaseToBeRun == 4
run('./TestCase_4/PRM.m');
saveas(gcf,'../results/PRM','png');
elseif CaseToBeRun == 5
run('./TestCase_5/dijkstra.m');
saveas(gcf,'../results/dijkstra','png');
elseif CaseToBeRun == 6
run('./TestCase_6/Astar.m');
saveas(gcf,'../results/Astar','png');
elseif CaseToBeRun == 7
run('./TestCase_7/APF.m');
saveas(gcf,'../results/APF','png');
elseif CaseToBeRun == 8
run('./TestCase_8/DWA.m');
saveas(gcf,'../results/DWA','png');
elseif CaseToBeRun == 9
run('./TestCase_9/GA.m');
saveas(gcf,'../results/GA','png');
elseif CaseToBeRun == 10
run('./TestCase_10/ACO.m');
saveas(gcf,'../results/ACO','png');
elseif CaseToBeRun == 11
run('./TestCase_11/PSO.m');
saveas(gcf,'../results/PSO','png');
elseif CaseToBeRun == 12
run('./TestCase_12/BFO.m');
saveas(gcf,'../results/BFO','png');
elseif CaseToBeRun == 13
run('./TestCase_13/ABC.m');
saveas(gcf,'../results/ABC','png');
elseif CaseToBeRun == 14
run('./TestCase_14/CSA.m');
saveas(gcf,'../results/CSA','png');
elseif CaseToBeRun == 15
🎉3 参考文献
[1]马玉佳,李锦红.全媒体时代主流意识形态传播的现实境遇与路径优化[J].传播与版权,2024(02):72-75.DOI:10.16852/j.cnki.45-1390/g2.2024.02.022.
[2]D. H P N ,Daniel T . Optimizing Snow and Ice Route Removal Operations Using Vehicle Routing Problems and Geographic Information System[J]. Journal of Cold Regions Engineering,2024,38(2).
[3]张晓倩,黄磊,石雨婷等.基于蚁群与DWA融合的移动机器人动态路径规划[J].组合机床与自动化加工技术,2024(01):9-13.DOI:10.13462/j.cnki.mmtamt.2024.01.003.
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]田欣.基于改进遗传算法的移动机器人路径规划研究[D].郑州大学,2016.
[2]吴佳丽.改进遗传算法的机器人路径规划研究[D].西北大学,2012.















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









