






目录

💥1 概述
使用描述物理现象的方程构建的动态模型可能需要通过调整参数来调整,以便预测输出与实验数据匹配。移动地平线估计是一种优化方法,用于将动态模型与连续测量保持一致。
使用描述物理现象的方程构建的动态模型通常需要进行参数调整,以便能够预测与实验数据相符的输出。移动地平线估计是一种常见的优化方法,用于通过最小化模型预测与测量数据之间的差异来调整模型参数,并将动态模型与连续测量保持一致。
移动地平线估计的步骤如下:
1. 确定目标函数:首先,你需要定义一个目标函数,用于衡量模型预测与测量数据之间的差异。常见的目标函数包括均方根误差(RMSE)或最小二乘法等。
2. 选择优化算法:根据问题的复杂性和要求,选择适当的优化算法进行参数调整。常见的优化算法包括梯度下降法、Levenberg-Marquardt算法或遗传算法等。
3. 初始参数设置:为了开始优化过程,需要初始化动态模型的参数。可以使用理论知识、经验数据或先前研究的结果来设置初始参数。
4. 迭代优化:开始迭代优化过程,根据选择的优化算法,在每次迭代中更新参数以最小化目标函数。迭代过程将根据测量数据的可用性和优化算法的设置进行调整。
5. 收敛判据:设定一个收敛判据,用于确定优化过程何时达到稳定状态。常见的收敛判据可以是目标函数值的变化小于某一阈值或达到一定的迭代次数等。
6. 结果评估:优化过程完成后,评估优化结果的质量。比较优化后的模型预测与测量数据,检查是否达到了匹配的结果。
7. 进一步分析:如果优化结果不够理想,可以进一步分析原因,并根据需要进行调整和改进。可能需要重新审查模型假设、增加额外的测量数据或调整优化算法的设置等。
需要注意的是,移动地平线估计是一个迭代过程,可能需要多次优化才能获得令人满意的结果。在整个过程中,持续的分析和调整是必要的,以确保动态模型与测量数据的一致性。
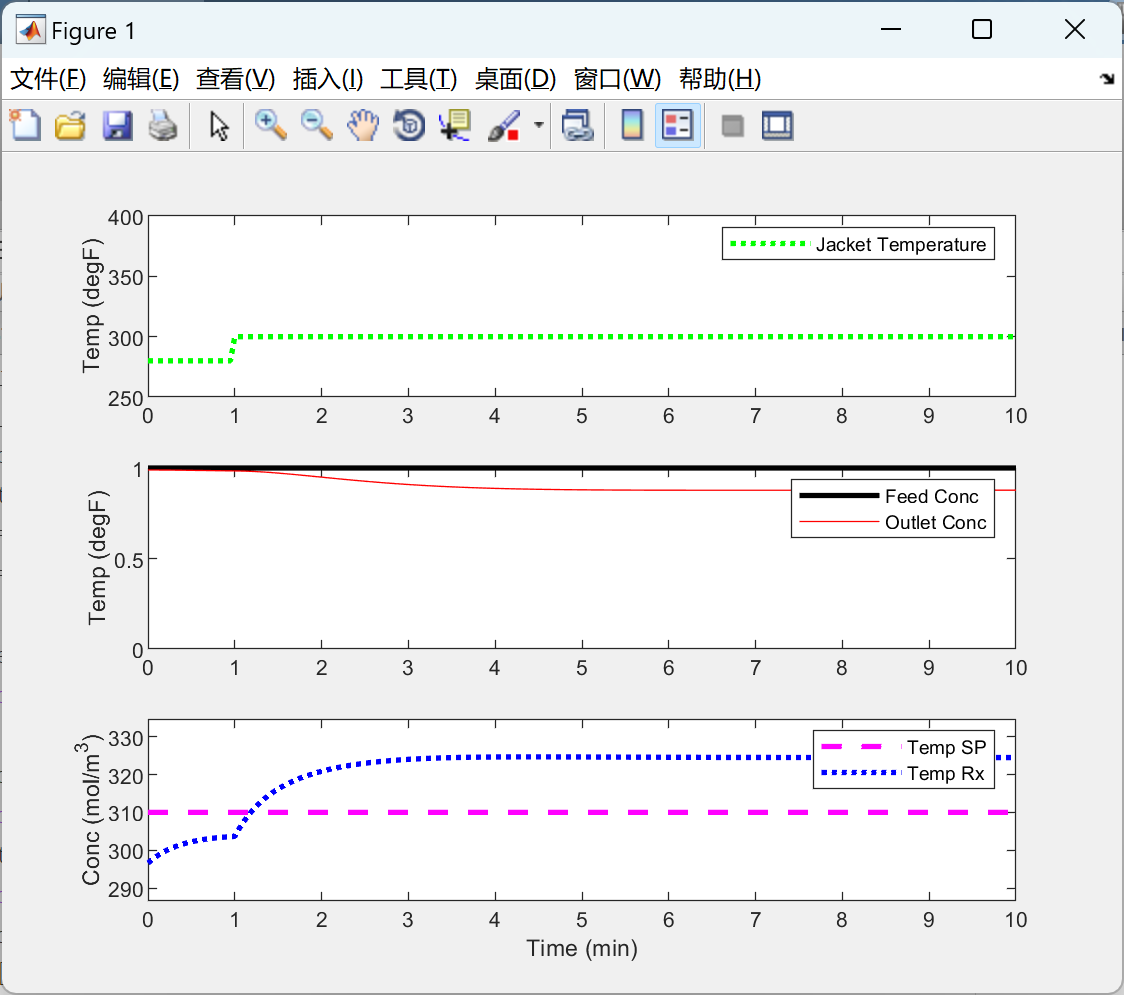
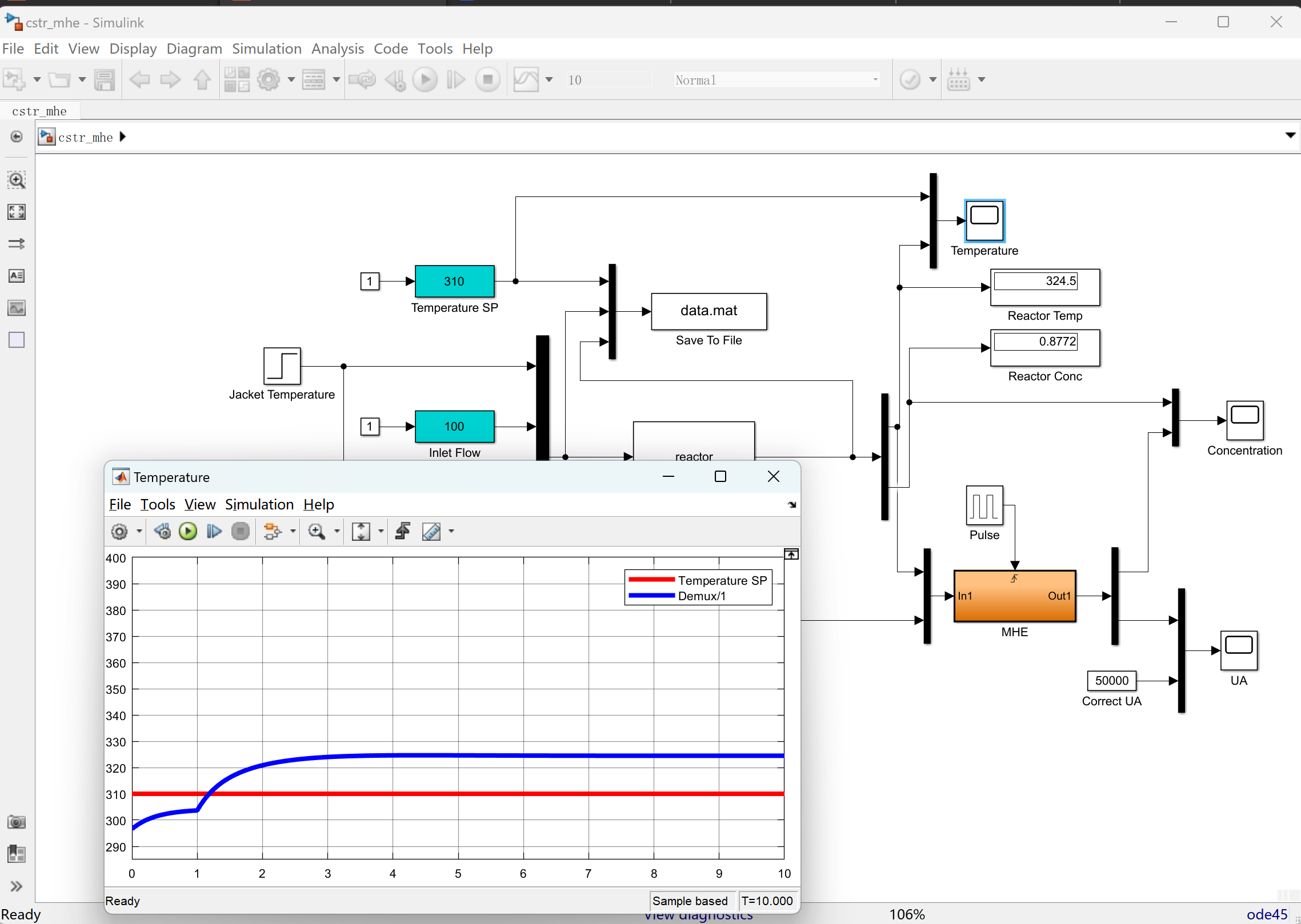
📚2 运行结果


部分代码:
%% Process
% input Tc (jacket cooling temperature)
apm_meas(s,a1,'Tc',Tc_meas(i));
% solve process model, 1 time step
output = apm(s,a1,'solve');
% retrieve Ca and T measurements from the process
Ca_meas(i) = apm_tag(s,a1,'Ca.model');
T_meas(i) = apm_tag(s,a1,'T.model');
%% Estimator
% input process measurements, don't use Ca_meas
% input Tc (jacket cooling temperature)
apm_meas(s,a2,'Tc',Tc_meas(i));
% input T (reactor temperature)
apm_meas(s,a2,'T',T_meas(i));
% solve process model, 1 time step
output = apm(s,a2,'solve');
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1].车行大唐路,安达地平线大唐移动与地平线签署5G+AI战略合作协议[J].数据通信,2020(06):4.
[2].车行大唐路,安达地平线大唐移动与地平线签署5G+AI战略合作协议[J].数据通信,2020(06):4.















 7678
7678











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









