






 本文介绍了如何在Autoware1.12环境中使用NDT点云定位,包括解决坐标系问题、加载地图并确保TF变换正确,以及关键步骤如加载滤波器和启动特定节点。作者通过实践解决了坐标固定问题并展示了rviz中坐标随车辆运动的变化过程。
本文介绍了如何在Autoware1.12环境中使用NDT点云定位,包括解决坐标系问题、加载地图并确保TF变换正确,以及关键步骤如加载滤波器和启动特定节点。作者通过实践解决了坐标固定问题并展示了rviz中坐标随车辆运动的变化过程。
Autoware 1.12学习整理--03--NDT点云定位_ndt 定位算法 官网-CSDN博客
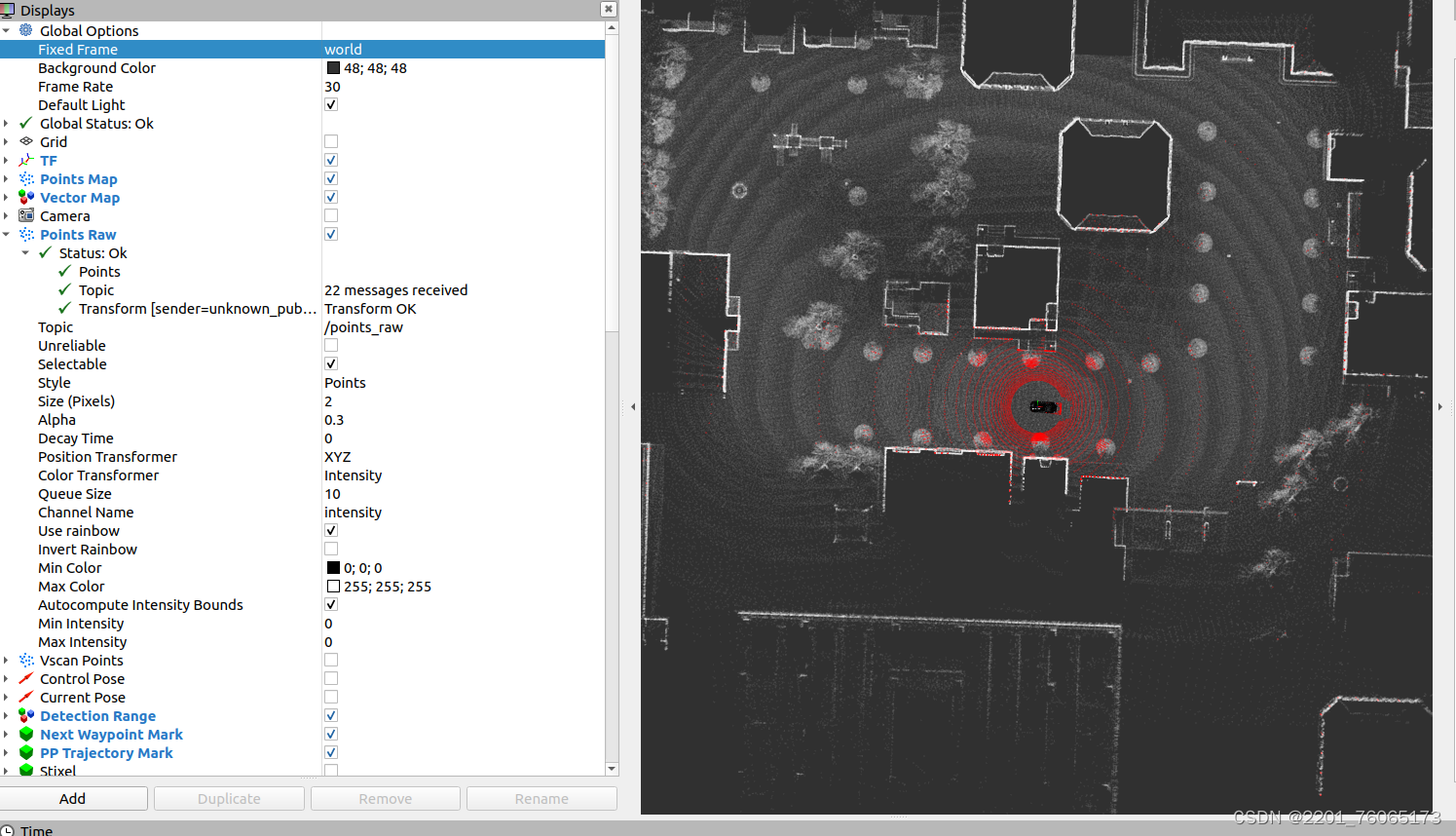
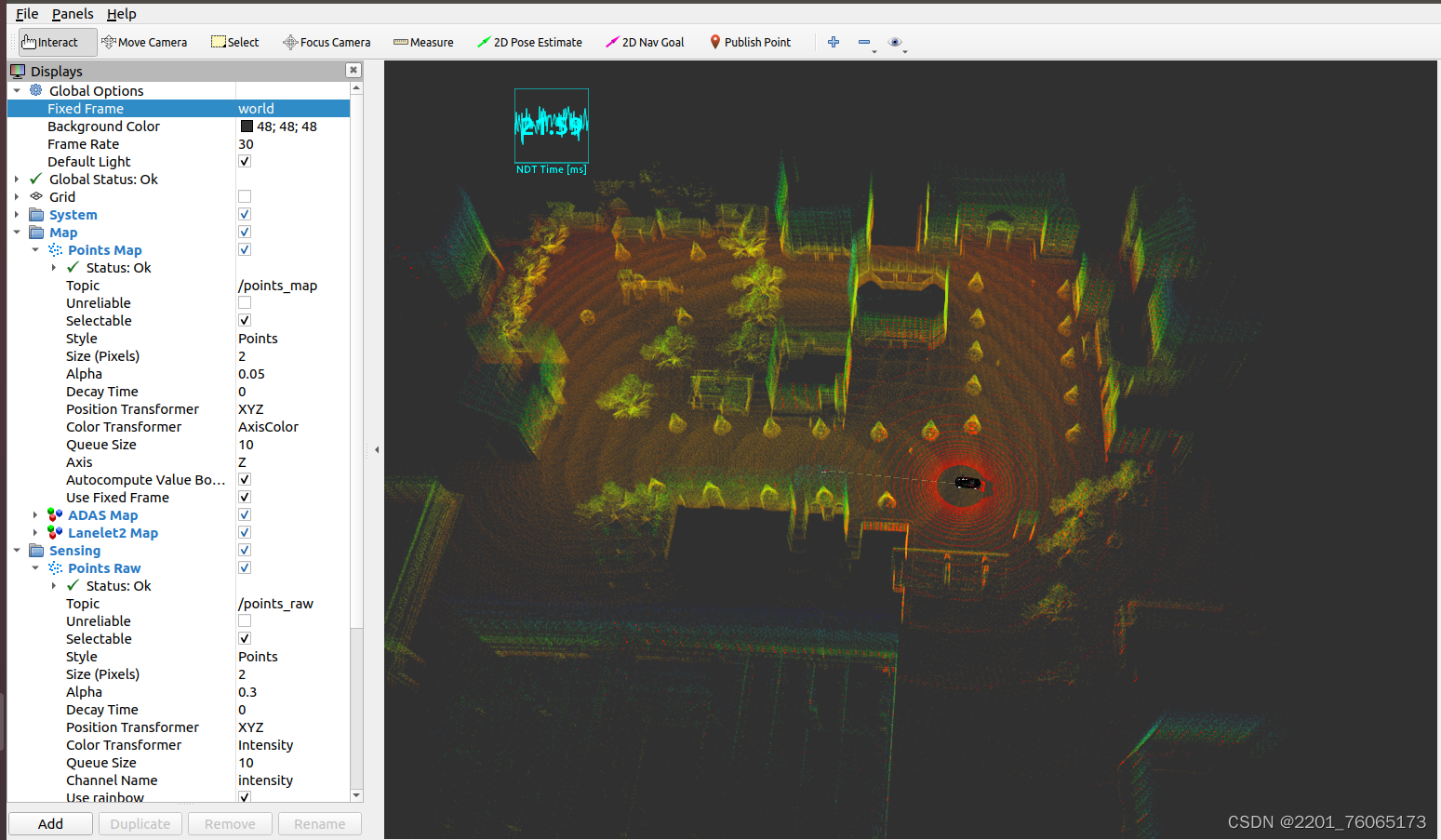
- 在实现以上demo中,自己始终无法显示/points_raw在world坐标系下
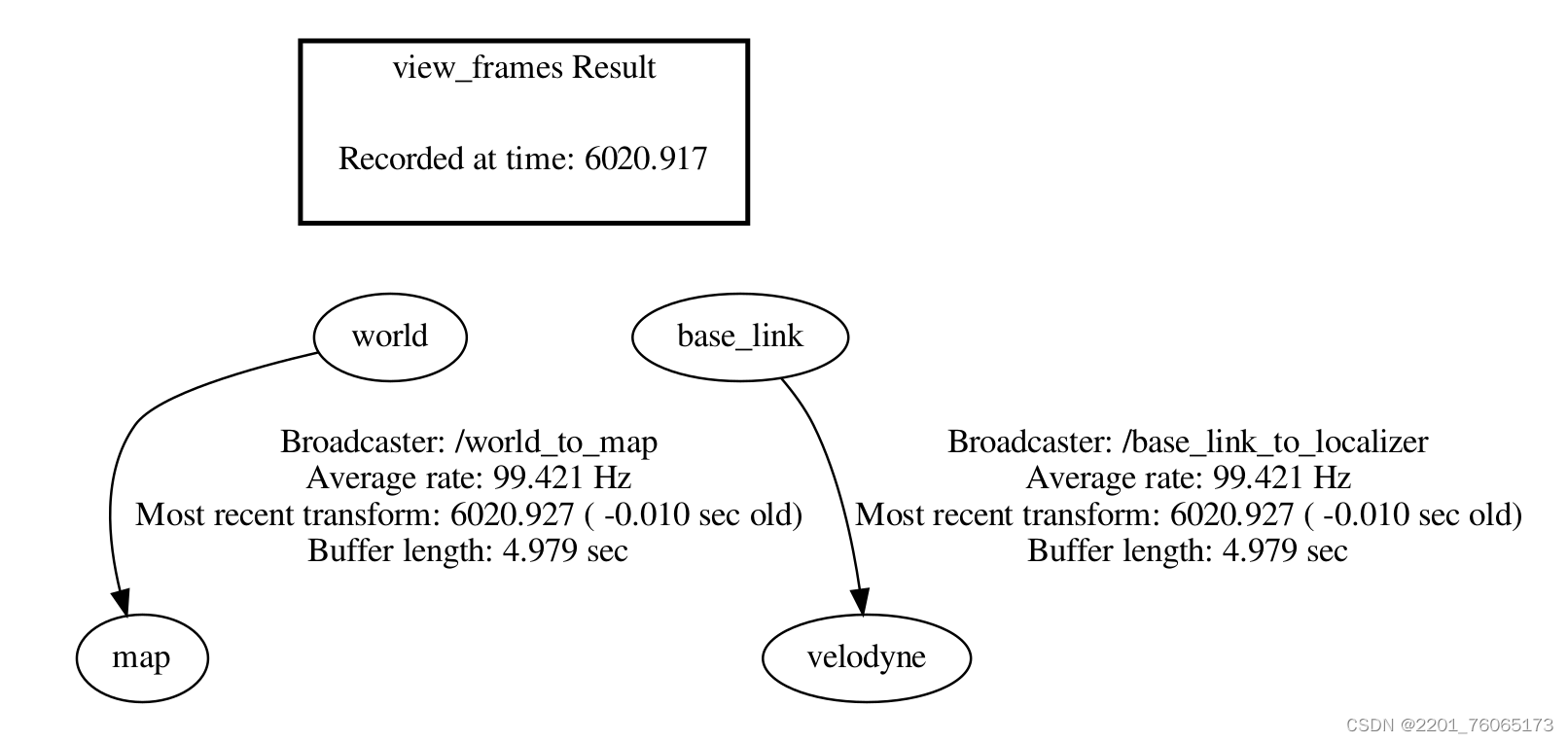
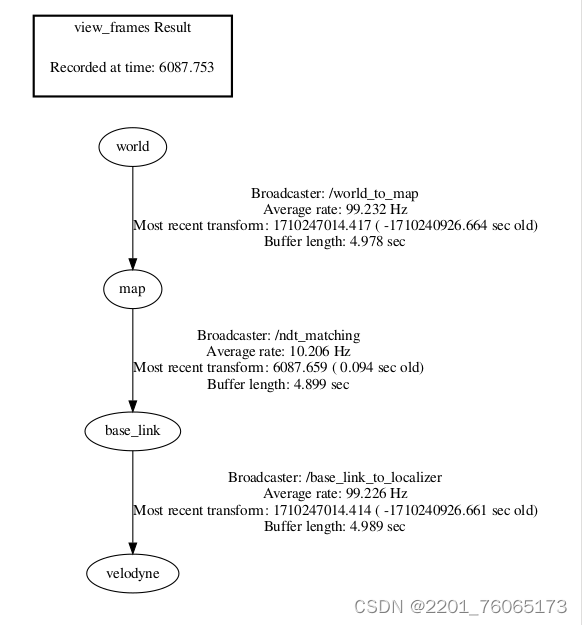
- 查看tf发现没有map到base_link的坐标系转换
- 自己通过ros将map到base_link的坐标系固定重合,能实现显示,不过当汽车运动时候,rviz中的坐标系就不会变化了
- 最终参考以下文章成功显示
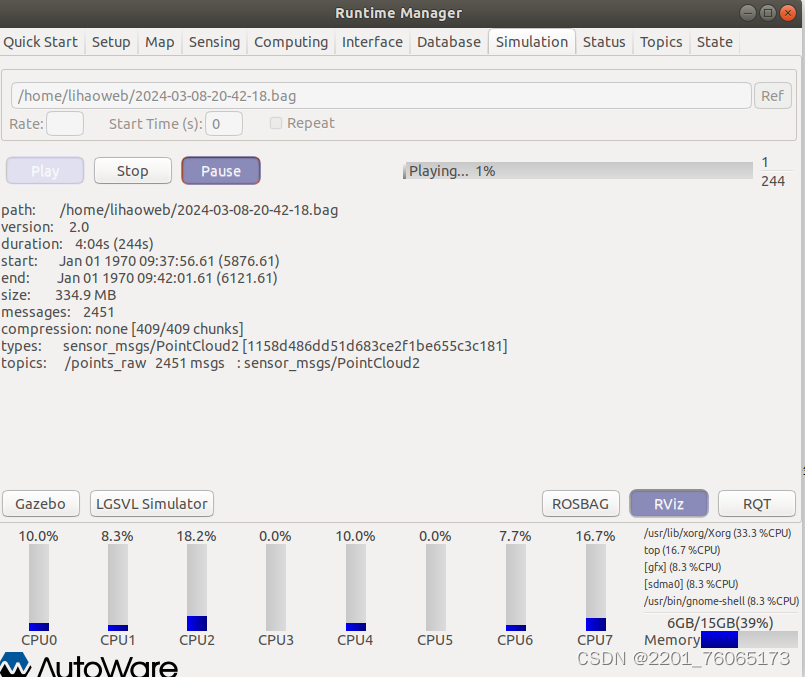
https://www.cnblogs.com/hgl0417/p/11143107.html - 首先在autoware中播放数据包
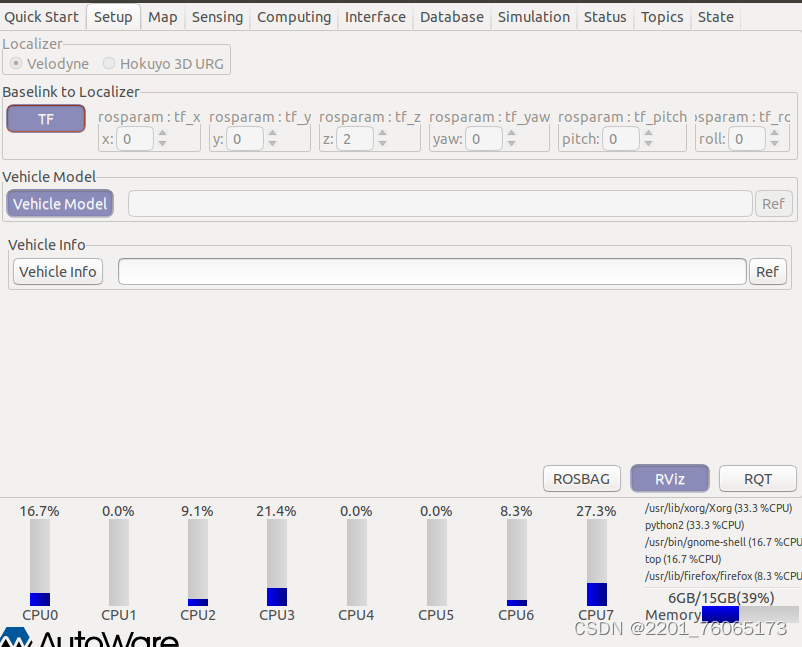
- 然后加载地图,加载world到map以及base_link到velodyne的TF变化

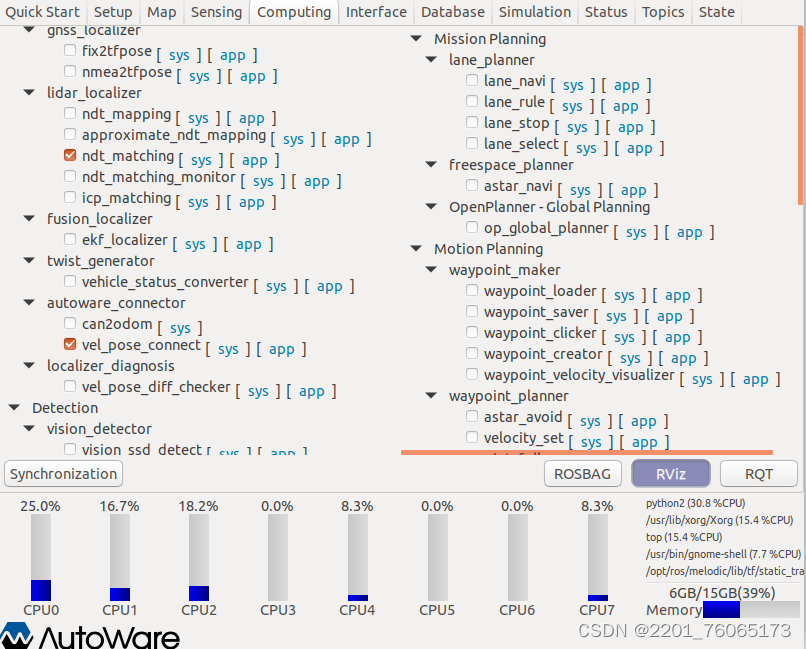
- 然后一定注意!加载相关滤波器!NDT_MATCHING!以及启动[vel_pose_connect]!

- 最后上结果















 2316
2316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









