






1、自建点云地图,算法很多,这里参考autoware的ndt mapping
Autoware 1.12学习整理--02--构建点云地图-CSDN博客
2、自建高精度地图,这里使用unity,参考如下,注意unity中坐标,不然会导致高精地图导入后与点云地图错位
基于Autoware制作高精地图(三)_autoware高精地图vector map-CSDN博客
3、autoware自带模型规划
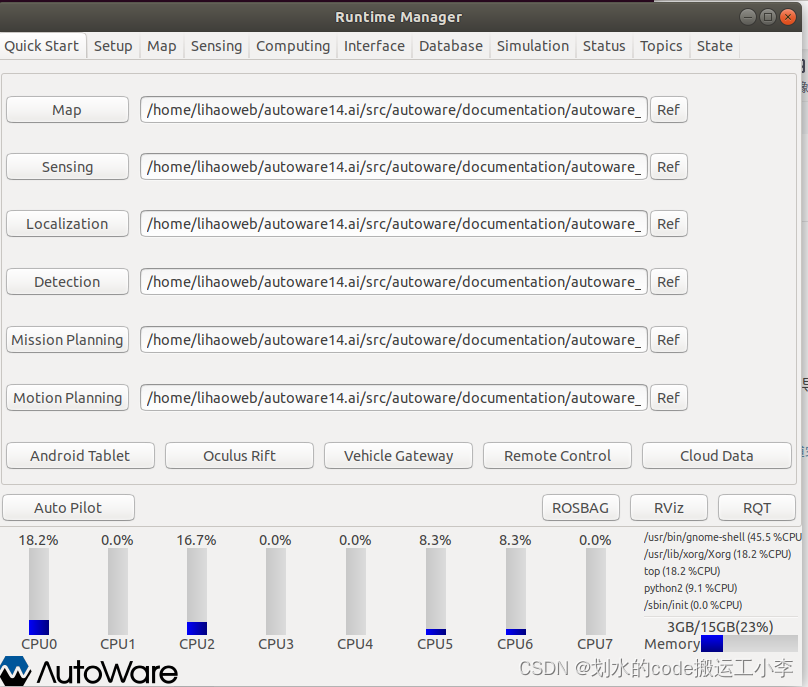
- 启动autoware管理页面
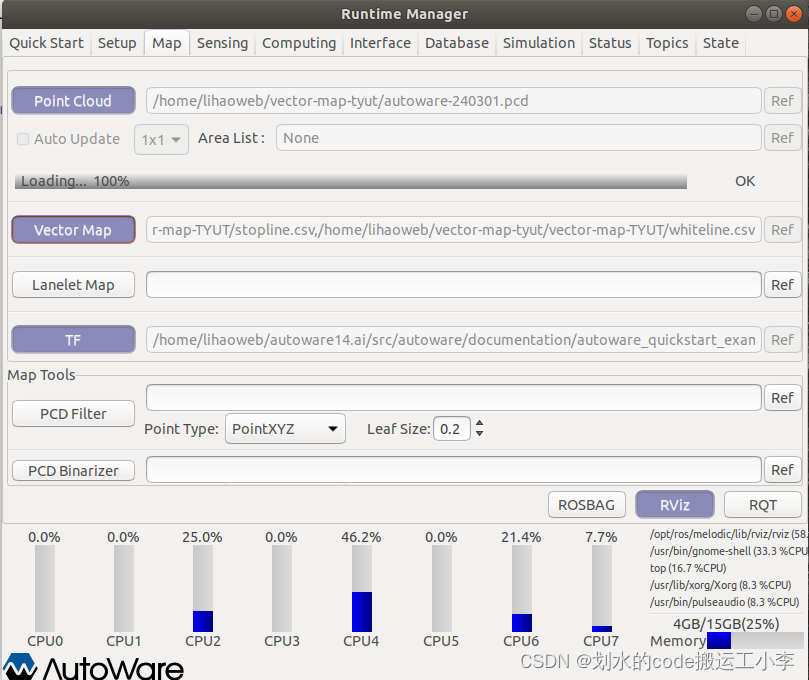
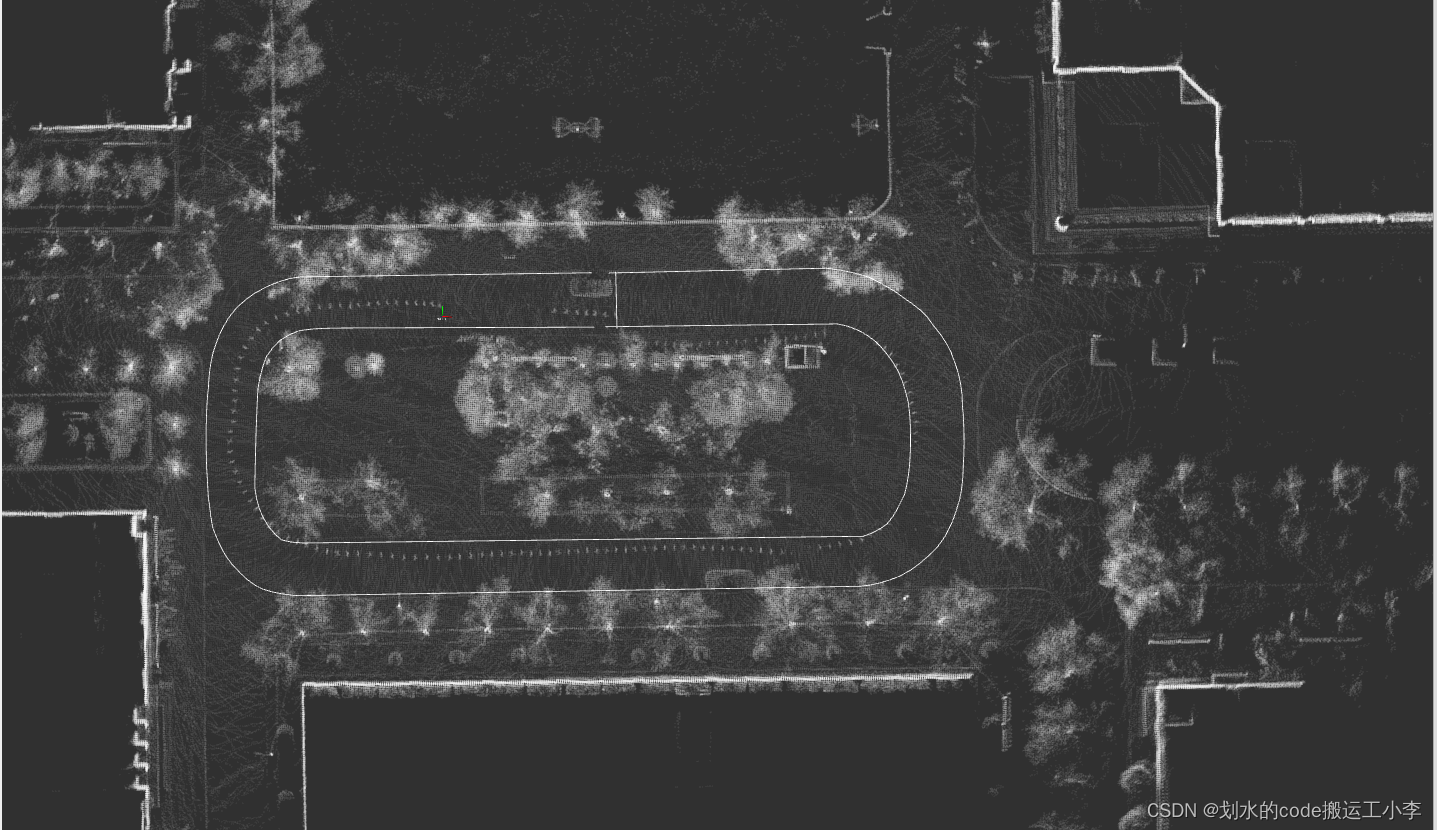
- 加载点云地图、高精地图、world-map坐标转换,rviz可视化显示如下(数据来源为试车采集学校部分环境)
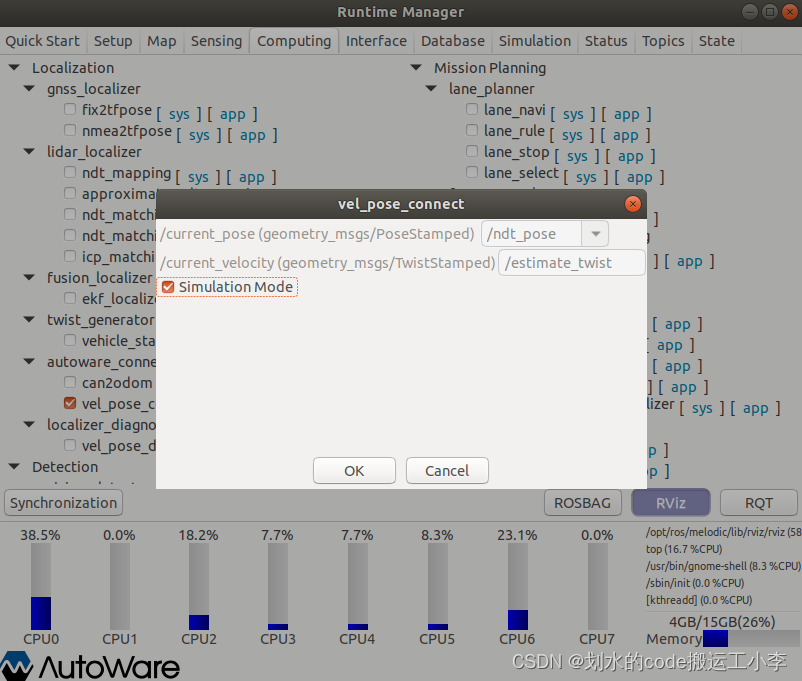
- 连接autoware自带仿真模型的速度和位姿
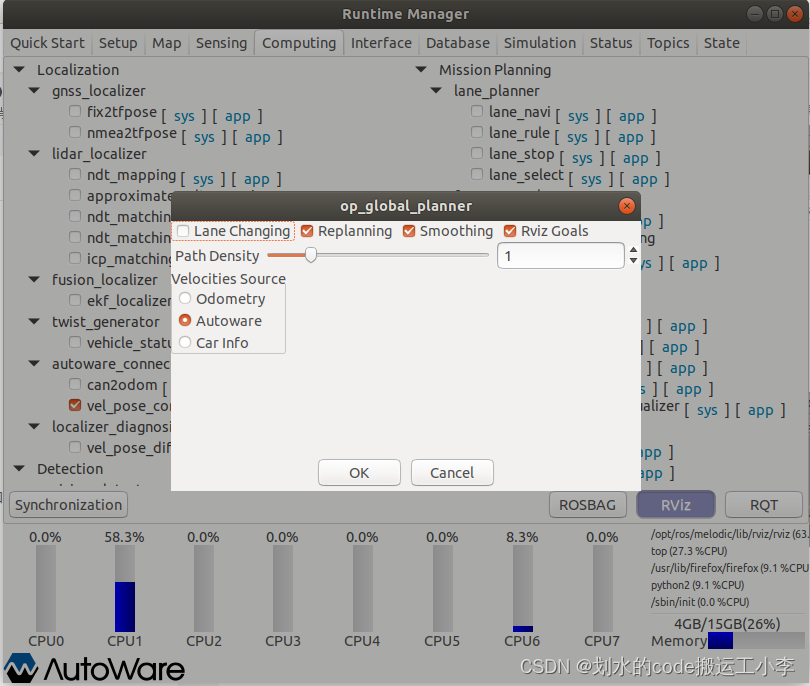
- 启动全局规划,并在rviz中制定起始点
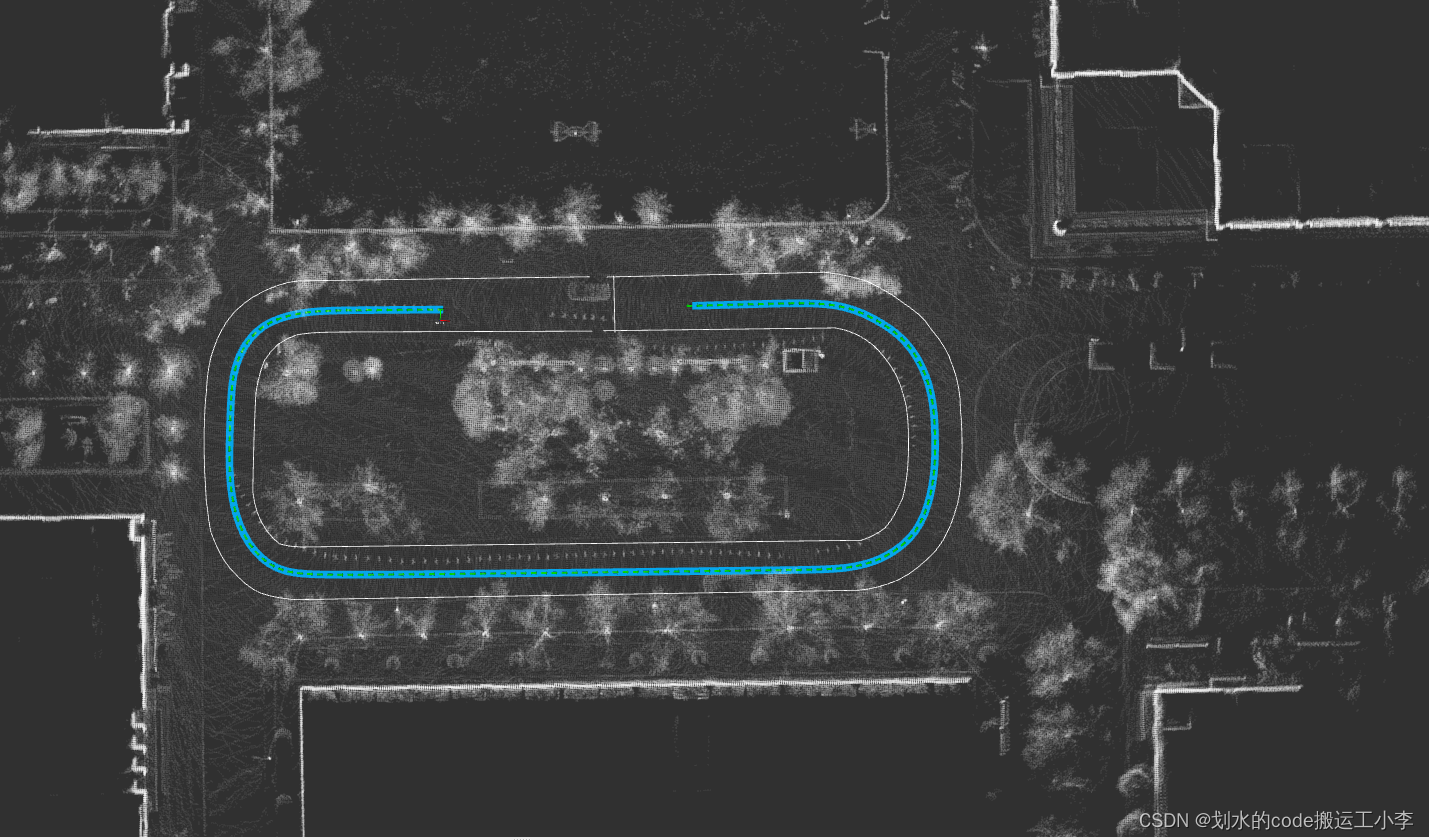
- 启用局部规划器和内置模型wf simulator,并指定模型位置,找到
MakerArray中的/local_trajectories_eval_rviz的话题并添加,则rviz中出现了多条局部路径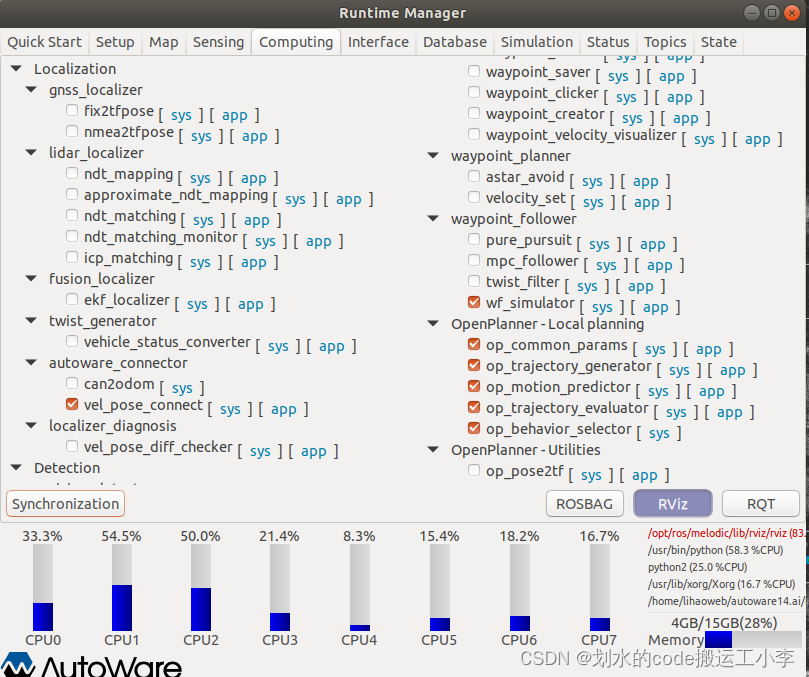

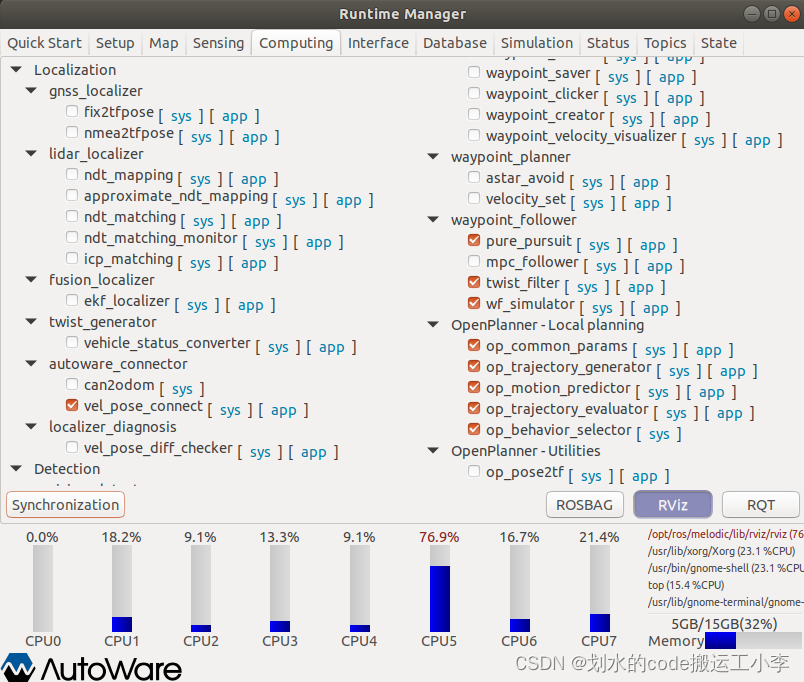
- 启用纯跟踪算法和速度滤波
- 效果如下
自建点云地图与高精地图的open planner规划_哔哩哔哩_bilibili
【自建点云地图与高精地图的open planner规划】 https://www.bilibili.com/video/BV1fz421k7UB/?share_source=copy_web&vd_source=cb0c61ddc8a76eb49d99cb5817d6f94f
autoware自带模型路径跟踪仿真

















 5933
5933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









