







就像所有的大型工程一样,在正式进行ROS1导航部署前,我们可以用python先模拟一下算法和地图,熟悉一下算法的结构,启动的思路,以及采用python这样更便捷的方式将地图文件转换为Gazebo可以识别的world文件,方便后续ROS用Gazebo搭建虚拟环境,这对后续进行ROS开发非常有帮助。本章我们将会实现通过python搭建一张地图,并用python实现A* 算法,并在生成的地图上生成A* 算法导航及路径。
运行环境和IDE:Windows,Anaconda,Pycharm
本章节的工程将会通过pycharm这个非常好用的IDE进行搭建,采用anaconda虚拟环境,方便管理python工程。工程结构如下:
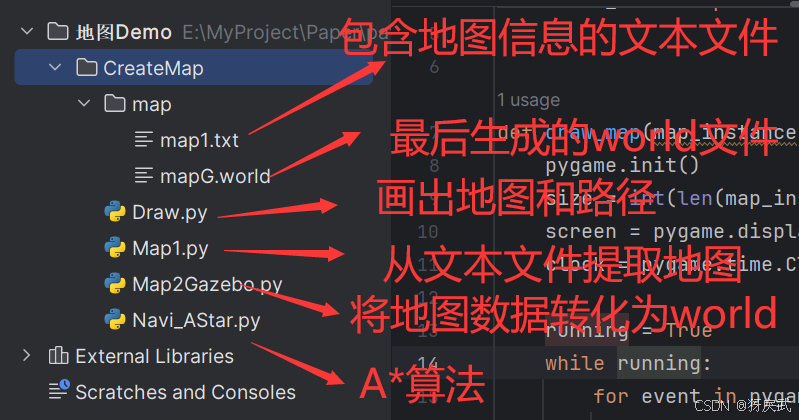
实现思路:首先写好地图接口,包括读取地图信息并用Pygame显示出地图的样子。其次是需要写一个将地图文件转换成可以被gazebo识别的.world文件。算法部分也用python暂时实现,在地图上用蓝色线条做出标注。
第一步是实现地图接口,原始的地图是一串字符,其中0代表空地,1代表障碍物,第一步要做的事情就是将这张地图正确读取并且用Pygame显示地图:
#地图类:
class Map:
def __init__(self, data):
self.data = data
self.entry = None
self.exit = None
def find_boundary_roads(self):
size = int(len(self.data) ** 0.5)
for i in range(size):
if self.data[i] == 0:
self.entry = (0, i)
break
for i in range(size * (size - 1), size * size):
if self.data[i] == 0:
self.exit = (size - 1, i % size)
break
def load_map(data):
map_instance = Map(data)
map_instance.find_boundary_roads()
return map_instance
def load_map_from_file(file_path):
map_data = []
with open(file_path, 'r') as file:
for line in file:
# 分割每行的数字,转换为整数,并扩展到map_data列表中
map_data.extend([int(num) for num in line.split()])
map_instance = Map(map_data)
map_instance.find_boundary_roads()
return map_instance接下来第二步,写一个非常简单的导航算法,这里用A*举例,其中的方法主要返回的是探索到的有效路径 :
# 算法部分:
import heapq
class Node:
def __init__(self, position=None, parent=None):
self.parent = parent # 父节点
self.position = position # 坐标
self.g = 0 # 起点开始的实际代价
self.h = 0 # 到终点的代价
self.f = 0 # g+h总代价
def __eq__(self, other): # 判断两个节点位置上是否相等
return self.position == other.position
def __lt__(self, other):
# 比较两个节点的 f 值,用于 heapq 维护优先队列
return self.f < other.f
def astar(map_data, start, end):
start_node = Node(start)
end_node = Node(end)
open_list = [] # 开放列表,待评估的节点
closed_list = [] # 关闭列表,已经被评估的节点
heapq.heappush(open_list, (start_node.f, start_node))
while open_list:
current_node = heapq.heappop(open_list)[1] # 持续取出f最小的点作为当前节点
closed_list.append(current_node)
if current_node == end_node: # 如果这个节点等于 最终的节点则通过父节点反向构建路径
path = []
while current_node:
path.append(current_node.position)
current_node = current_node.parent # 通过父节点逆向搜索
return path[::-1]
(x, y) = current_node.position
neighbors = [(x - 1, y), (x + 1, y), (x, y - 1), (x, y + 1)] # 获得邻居坐标
for next in neighbors:
if next[0] < 0 or next[0] >= len(map_data) ** 0.5 or next[1] < 0 or next[1] >= len(map_data) ** 0.5: # 检查邻居是否越界
continue
if map_data[next[0] * int(len(map_data) ** 0.5) + next[1]] == 1: # 检查邻居是否为障碍
continue
neighbor = Node(next, current_node)
if neighbor in closed_list: # 邻居是否为曾经的路径
continue
neighbor.g = current_node.g + 1
neighbor.h = ((neighbor.position[0] - end_node.position[0]) ** 2) + (
(neighbor.position[1] - end_node.position[1]) ** 2)
neighbor.f = neighbor.g + neighbor.h
if add_to_open(open_list, neighbor):
heapq.heappush(open_list, (neighbor.f, neighbor))
def add_to_open(open_list, neighbor):
for node in open_list:
if neighbor == node[1] and neighbor.g > node[1].g:
return False
return True第三步就是画出地图,并在地图上标记出路径,这里用到了pygame这个比较好用的库用于建图:
# 画出地图
import pygame
import time
from Map1 import load_map_from_file # 前面写的提取地图
from Navi_AStar import astar # 前面写的算法
def draw_map(map_instance, path):
pygame.init()
size = int(len(map_instance.data) ** 0.5)
screen = pygame.display.set_mode((size * 10, size * 10))
clock = pygame.time.Clock()
running = True
while running:
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
screen.fill((255, 255, 255))
for y in range(size):
for x in range(size):
rect = pygame.Rect(x * 10, y * 10, 10, 10)
if map_instance.data[y * size + x] == 1:
pygame.draw.rect(screen, (0, 0, 0), rect)
elif (y, x) in path:
pygame.draw.rect(screen, (0, 0, 255), rect)
pygame.display.flip()
clock.tick(60)
pygame.quit()
if __name__ == "__main__":
# 示例地图数据
file_path = 'map/map1.txt' # 文件路径
map_instance = load_map_from_file(file_path);
start, end = map_instance.entry, map_instance.exit
path = astar(map_instance.data, start, end)
draw_map(map_instance, path)运行结果:
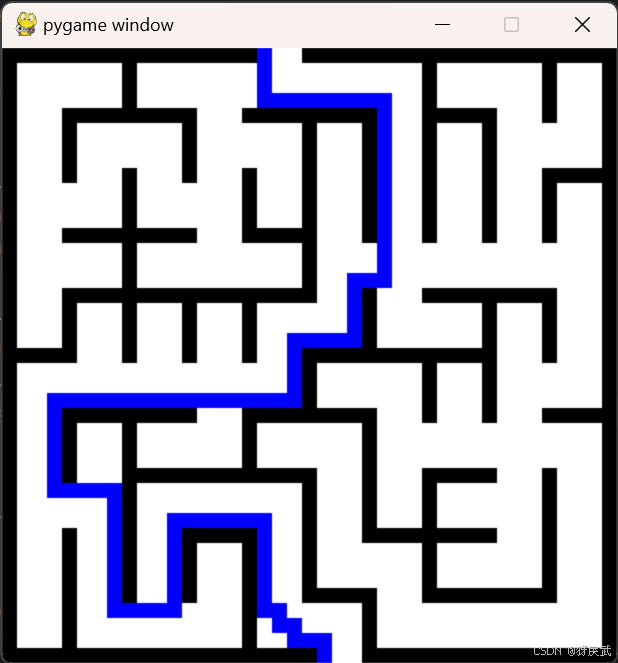
(蓝色是规划得到的路径,黑色是障碍物搭建的地图)
最后,因为我们的ROS1模拟实验需要在Gazebo上面运行,所以我们需要将生成的这张地图转换成world类型,方便gazebo去读取:
def generate_gazebo_world(input_file, output_file):
with open(input_file, 'r') as file:
lines = file.readlines()
block_size = 0.5 # 根据实际情况调整
height = 1 # 物块高度
# 计算地图偏移量
last_line = lines[-1].strip().split()
zero_indices = [i for i, x in enumerate(last_line) if x == '0']
if zero_indices:
mid_index = zero_indices[len(zero_indices) // 2]
map_offset_x = -mid_index * block_size
map_offset_z = -len(lines) * block_size
with open(output_file, 'w') as file:
file.write('<?xml version="1.0"?>\n')
file.write('<sdf version="1.6">\n')
file.write('<world name="simple_map_world">\n')
# 添加全局地板
file.write('<model name="ground_plane">\n')
file.write('<static>true</static>\n')
file.write('<pose>0 0 0 0 0 0</pose>\n')
file.write('<link name="link">\n')
file.write('<collision name="collision">\n')
file.write('<geometry>\n')
file.write('<plane><normal>0 0 1</normal><size>50 50</size></plane>\n')
file.write('</geometry>\n')
file.write('</collision>\n')
file.write('<visual name="visual">\n')
file.write('<geometry>\n')
file.write('<plane><normal>0 0 1</normal><size>50 50</size></plane>\n')
file.write('</geometry>\n')
file.write('</visual>\n')
file.write('</link>\n')
file.write('</model>\n')
for i, line in enumerate(lines):
cells = line.strip().split(' ')
for j, cell in enumerate(cells):
if cell == '1':
x = j * block_size + map_offset_x + block_size / 2
z = i * block_size + map_offset_z + block_size / 2
file.write(f'<model name="block_{i}_{j}">\n')
file.write('<static>true</static>\n')
file.write(f'<pose>{x} {z} {height / 2} 0 0 0</pose>\n')
file.write('<link name="link">\n')
file.write('<collision name="collision">\n')
file.write('<geometry>\n')
file.write(f'<box><size>{block_size} {block_size} {height}</size></box>\n')
file.write('</geometry>\n')
file.write('</collision>\n')
file.write('<visual name="visual">\n')
file.write('<geometry>\n')
file.write(f'<box><size>{block_size} {block_size} {height}</size></box>\n')
file.write('</geometry>\n')
# 设置材质为黑色
file.write('<material>\n')
file.write('<ambient>0 0 0 1</ambient>\n') # 黑色环境光
file.write('<diffuse>0 0 0 1</diffuse>\n') # 黑色漫反射光
file.write('<specular>0 0 0 1</specular>\n') # 黑色镜面光
file.write('</material>\n')
file.write('</visual>\n')
file.write('</link>\n')
file.write('</model>\n')
file.write('</world>\n')
file.write('</sdf>\n')
# 使用脚本
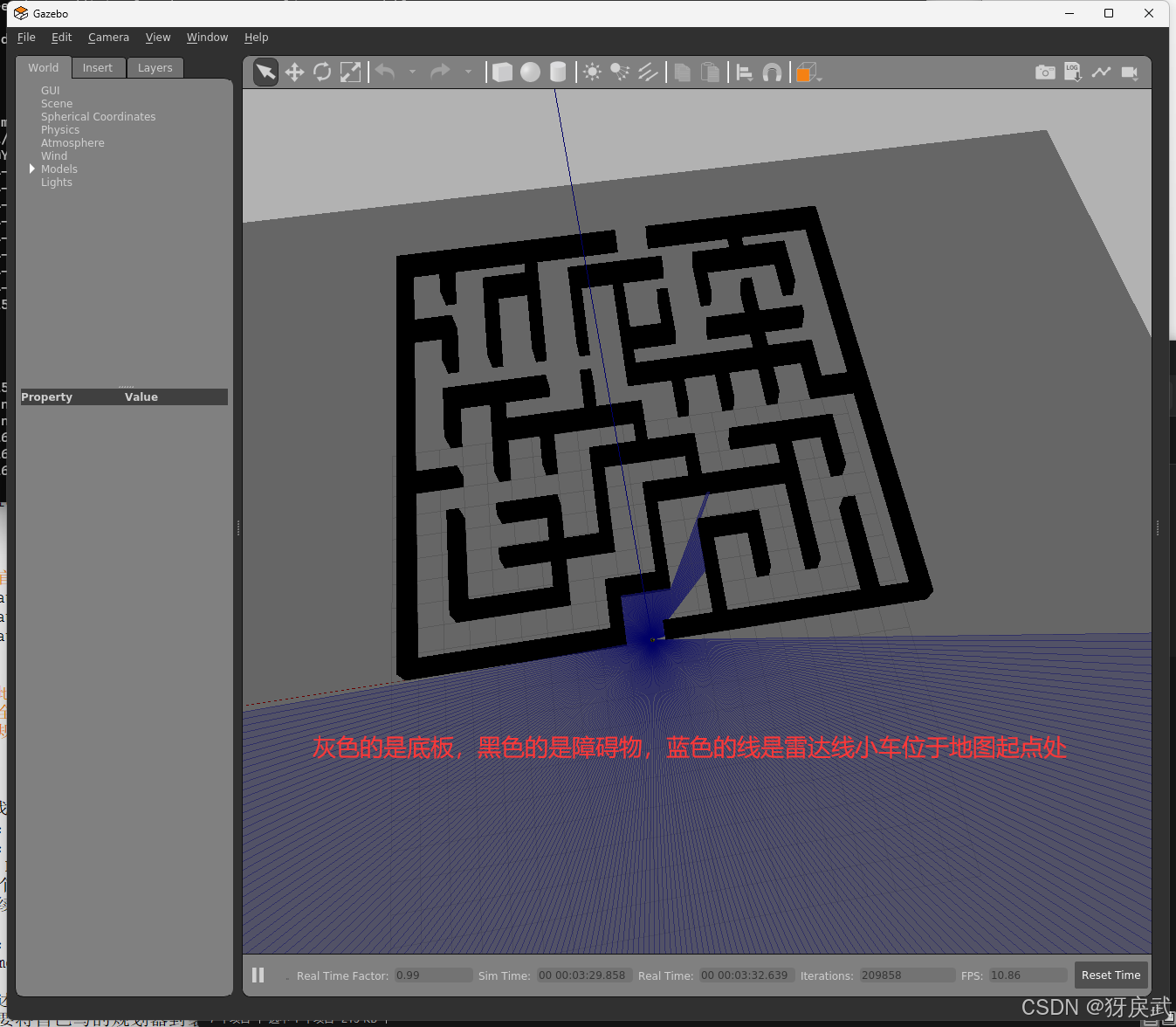
generate_gazebo_world('map/map1.txt', 'map/mapG.world')Gazebo运行后的情况:
总结:
本章主要介绍了用python搭建地图,并简单查看算法运行的结果,将地图转换为Gazebo可以识别的world格式(Gazebo用于ROS的仿真实验),为之后真正将算法部署在ROS系统中做铺垫。
接下来是制定方案,在虚拟环境中测试方案的可行性:

















 654
654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









