







matlab 多智能体系统编队控制仿真,非线性,一致性,领导跟随控制,有限时间控制等
ID:61599637624085488
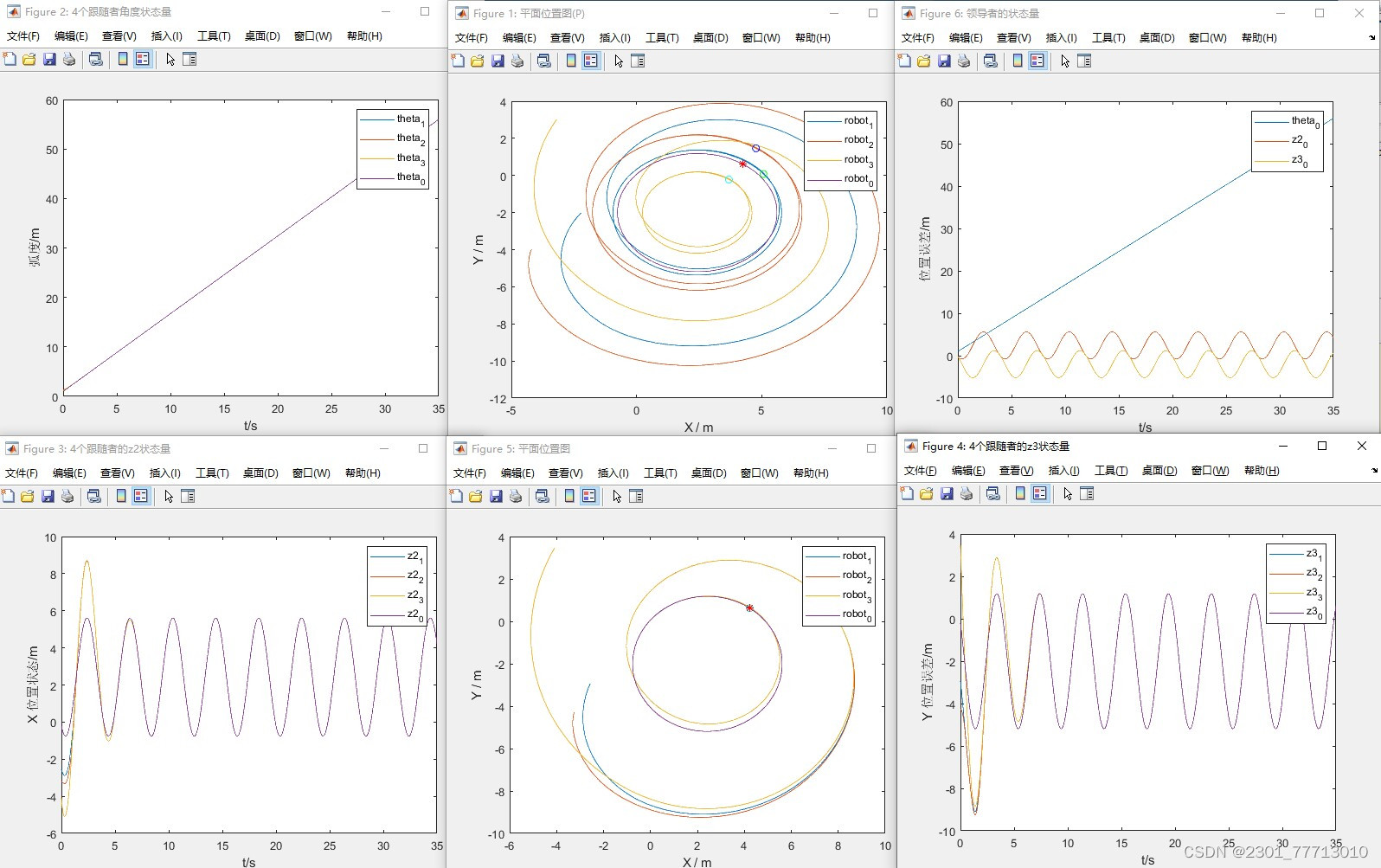
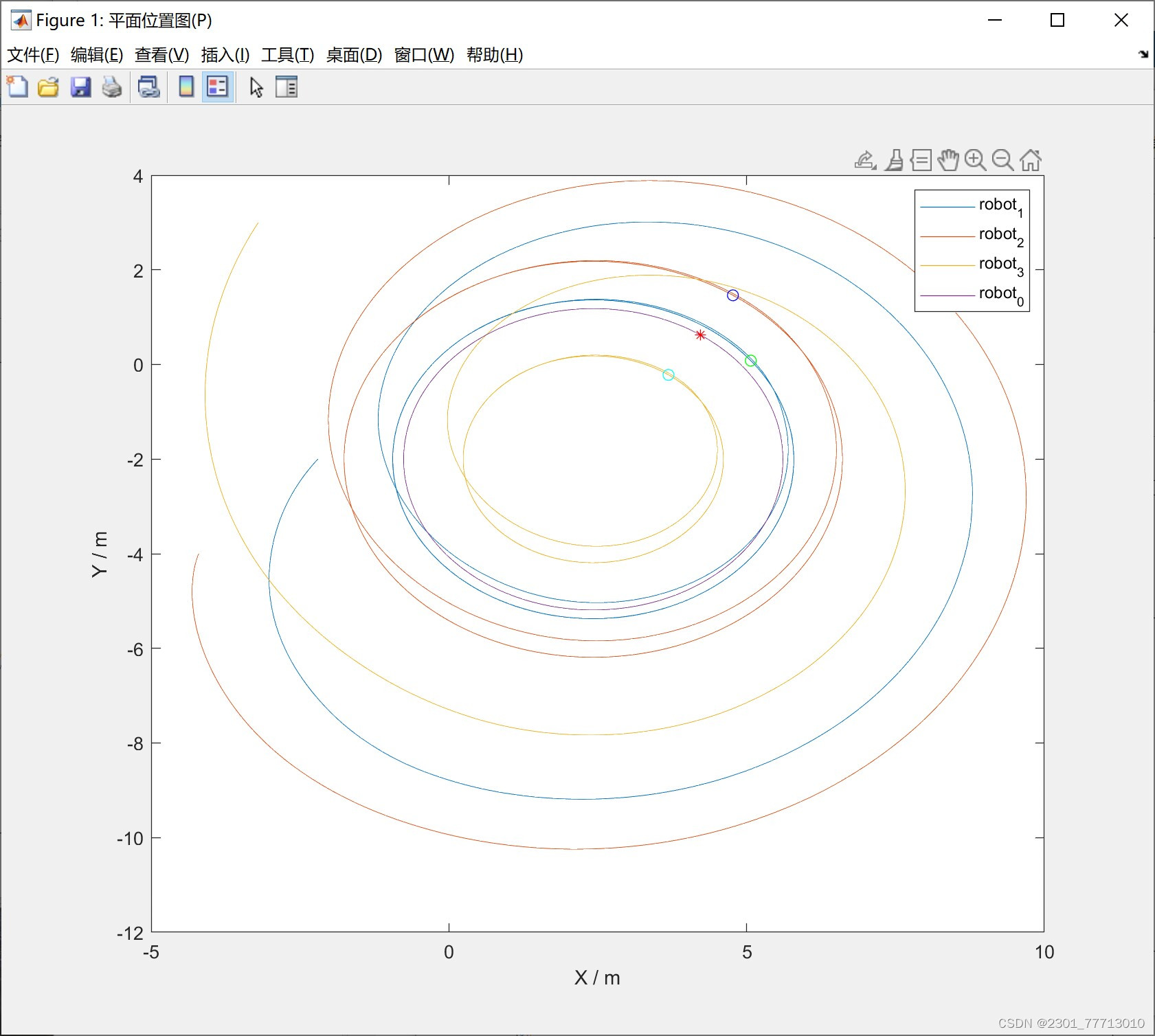
在自然界中,人们经常可以观察到一种迷人的现象,大量的鸟、鱼、昆虫等生物会形成一个规则有序的群体进行运动。由大量这样个体抽象而成的系统被称为多智能体系统(Multi-Agent Systems,MAS),多智能体系统的协调问题成为了当前的一个研究热点。 本文针对多智能体系统协调运动的同步条件、多智能体系统群集控制和多机器人系统编队控制问题进行了研究。首先,对具有位置依赖约束的Vicsek模型进行了仿真分析,观察到了智能体之间的信息交换拓扑图并不是系统同步的唯一约束条件,为后续的理论证明打下了基础。其次,针对具有一阶积分器模型的多智能体系统,利用神经网络模型和复杂网络牵引控制方法设计了基本群集控制器、满足作动器饱和约束的群集控制器和时滞条件下的群集控制器,并通过理论证明和数值仿真对控制器进行了验证。最后,针对具有二阶积分器模型的多机器人系统,利用人工势能场和虚拟领导者方法设计了两种编队控制器,第一种控制器能够满足做动器饱和约束,第二种控制器能够同时保证机器人达到期望间距和方位角,并通过理论证明和数值仿真验证了控制器的有效性。 通过本文的研究工作,为多智能体系统同步条件的理论证明提供了数值依据。首次将神经网络稳定性和复杂网络牵引控制和多智能体系统群集控制问题相结合,改进了前人提出的多机器人编队
一个多智
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1042
1042











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









