







目录
关于 launch 文件的使用我们已经不陌生了,在第一章内容中,就曾经介绍到:
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
采用的优化策略便是使用roslaunch 命令集合 launch 文件启动管理节点,并且在后续教程中,也多次使用到了 launch 文件
概念
launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
作用
简化节点的配置与启动,提高ROS程序的启动效率。
使用
以 turtlesim 为例演示
1)新建launch文件
在功能包下添加 launch目录, 目录下新建 xxxx.launch 文件,编辑 launch 文件
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="myTurtle" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="myTurtleContro" output="screen" /></launch>2) 调用 launch 文件
roslaunch 包名 xxx.launch注意:roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore
3)运行结果
本节主要介绍launch文件的使用语法,launch 文件中的标签,以及不同标签的一些常用属性。
4)参考文献
4.2.1 Launch文件标签之launch
<launch>标签是所有 launch 文件的根标签,充当其他标签的容器
1.属性
deprecated = "弃用声明"、告知用户当前 launch 文件已经弃用
2.子级标签
所有其它标签都是launch的子级
3.实操
代码
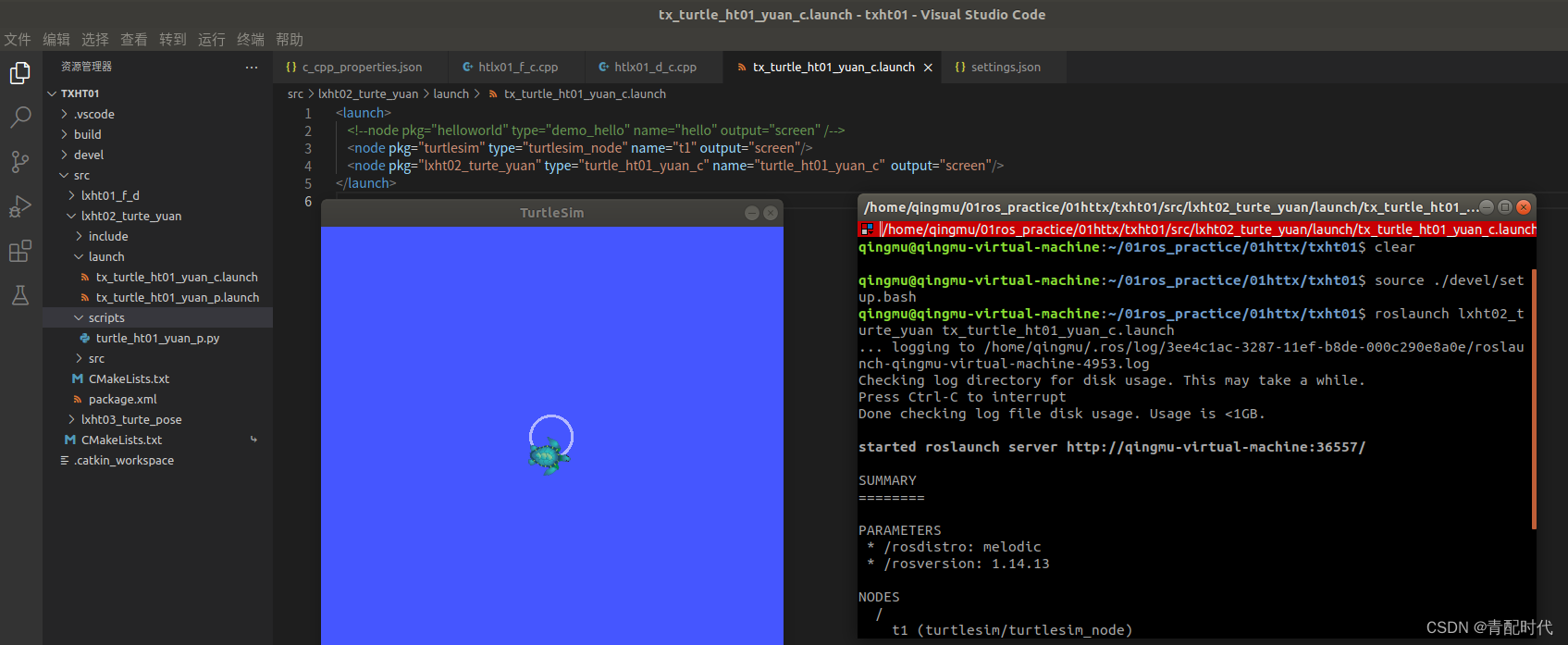
<launch deprecated="此文件已经超时,不建议使用" >
<!--node pkg="helloworld" type="demo_hello" name="hello" output="screen" /-->
<node pkg="turtlesim" type="turtlesim_node" name="t1" output="screen" />
<node pkg="lxht02_turte_yuan" type="turtle_ht01_yuan_c" name="turtle_ht01_yuan_c" output="screen"/>
</launch>
效果图

4.2.2 Launch文件标签之node
<node>标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
1.属性
- pkg="包名"
节点所属的包
- type="nodeType"
节点类型(与之相同名称的可执行文件)
- name="nodeName"
节点名称(在 ROS 网络拓扑中节点的名称)
- args="xxx xxx xxx" (可选)
将参数传递给节点
- machine="机器名"
在指定机器上启动节点
- respawn="true | false" (可选)
如果节点退出,是否自动重启

respawn_delay=" N" (可选) <
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 451
451











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











