







以下内容为个人的初学记录,如有错误,欢迎指正。
概述
事件组用一个整数来表示,每一位表示一个事件,事件未完成(未发生)为0,已完成(发生)为1。任务之间可以通过事件置0/1来实现相互之间的沟通;
前面的队列、信号量、互斥量都能唤醒一个任务,而事件组可以唤醒多个任务。比如有多个任务等待事件bit0的发生,当bit0置1后,多个任务将被唤醒;
事件组的高8位固定由内核使用,总位数由configUSE_16_BIT_TICKS决定:
| configUSE_16_BIT_TICKS | 总位数 |
|---|---|
| 1 | 16 |
| 0 | 32 |
函数
【创建事件组】
/*动态*/
EventGroupHandle_t xEventGroupCreate( void );
/*静态*/
EventGroupHandle_t xEventGroupCreateStatic( StaticEventGroup_t * pxEventGroupBuffer);
【删除事件组】
void vEventGroupDelete(EventGroupHandle_t xEventGroup);
xEventGroup:事件组句柄
【设置事件】
EventBits_t xEventGroupSetBits(EventGroupHandle_t xEventGroup,
const EventBits_t usBitsToSet);
/*中断中设置*/
BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
BaseType_t * pxHigherPriorityTaskWoken );
usBitsToSet:设置哪些位为1。比如0x11就将bit4和bit0设置为1;
pxHigherPriorityTaskWoken:有更高优先级被唤醒时会被设置为pdTRUE,是提示需要进行上下文切换的标志位;
在中断中设置事件组会导致多个任务被唤醒,造成不确定性,因而xEventGroupSetBitsFromISR与其他的FromISR函数有不同之处。1
【等待事件】
EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait );
xClearOnExit:函数退出前是否清除事件
- pdTRUE;
- pdFALSE;
xWaitForAllBits:是否是等待(所选的)所有位置1才算等待结束
- pdTRUE:等待所有,即所选的bit之间是&&(与)的关系
- pdFALSE: 不等待所有,即是II(或)的关系
xTicksToWait :阻塞时长;
清除事件也可以用xEventGroupClearBits()函数清除,但是在等待函数和清除函数中间可能会被切换出去,导致事件组被修改,并不是一个原子操作(不会被其他代码路径中断)
【同步点】
有时候事件的进展需要知道其他任务的事件完成情况,因而需要同步:
EventBits_t xEventGroupSync( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
const EventBits_t uxBitsToWaitFor,
TickType_t xTicksToWait );
uxBitsToSet:设置自己的事件;
uxBitsToWaitFor:等待其他任务的事件(直接是&&的关系);
练习
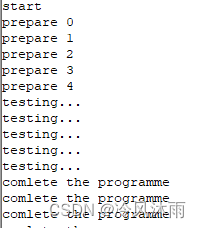
模拟一个项目从开启、准备、测试、完成的流程:
#define START 0x01
#define PREPARE 0x02
#define SOFTWARE 0x04
#define TEST 0x08
创建三个任务——准备、测试、开启与完成,优先级递增。
xTaskCreate(Prepare_Task, "software", 128, NULL, 1, NULL);
Test_Returned = xTaskCreate(Test_Task, "test", 128, NULL, 2, NULL);
Programme_Returned = xTaskCreate(Programme_Task, "programme", 128, NULL, 3, NULL);
优先级最高的Programme_Task发起事件START,并同步等待TEST事件;
void Programme_Task(void* argument){
printf("start\r\n");
xEventGroupSync(EventGroup, START, TEST, portMAX_DELAY);
while(1){
printf("comlete the programme\r\n");
}
}
Prepare_Task收到项目启动的通知后开始着手准备
void Prepare_Task(void* argument){
xEventGroupWaitBits(EventGroup, START, pdTRUE, pdTRUE, portMAX_DELAY);
for(int i=0; i<5; i++){
printf("prepare %d\r\n", i);
}
xEventGroupSetBits(EventGroup, PREPARE);
}
事件PREPARE完成后,Test_Task退出阻塞,结束等待事件
void Test_Task(void* argument){
xEventGroupWaitBits(EventGroup, PREPARE, pdTRUE, pdTRUE, portMAX_DELAY);
for(int i=0; i<5; i++){
printf("testing...\r\n");
}
xEventGroupSetBits(EventGroup, TEST);
while(1){
}
}
TEST完成后同步回Programme_Task,Programme_Task退出阻塞,宣布项目完成:
原来创建四个任务(4*128word),但是发现四个任务似乎内存不够导致Programme_Task创建失败,最后将两个任务改为一个任务(Prepare_Task)。
值得注意的是,ISR中的函数,比如队列函数xQueueSendToBackFromISR、信号量函数xSemaphoreGiveFromISR,它们会唤醒某个任务,最多只会唤醒1个任务。 但是设置事件组时,有可能导致多个任务被唤醒,这会带来很大的不确定性。所以xEventGroupSetBitsFromISR函数不是直接去设置事件组,而是给一个FreeRTOS后台任务 (daemon task) 发送队列数据,由这个任务来设置事件组。
如果后台任务的优先级比当前被中断的任务优先级高,xEventGroupSetBitsFromISR会设置*pxHigherPriorityTaskWoken为pdTRUE。
如果daemon task成功地把队列数据发送给了后台任务,那么
xEventGroupSetBitsFromISR的返回值就是pdPASS。
原文:
《FreeRTOS入门与工程实践-基于STM32F103》教程-基于DShanMCU-103(STM32F103)
↩︎















 751
751

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









