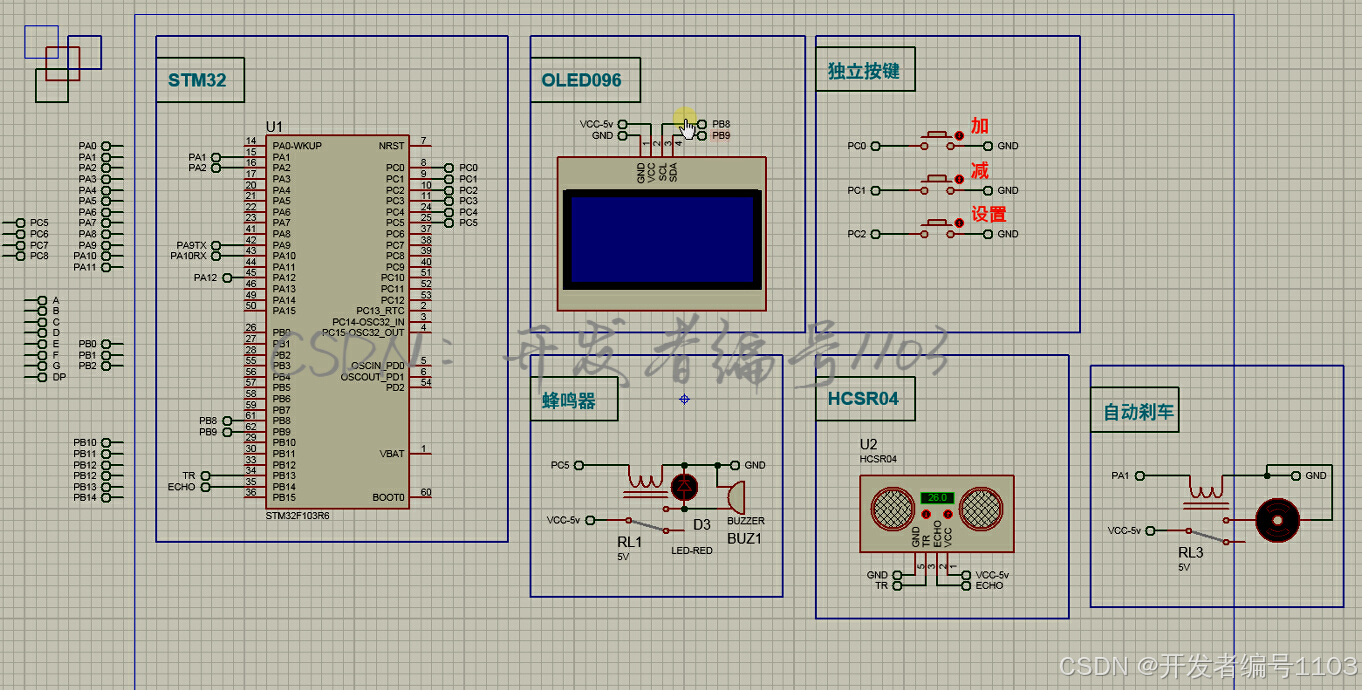
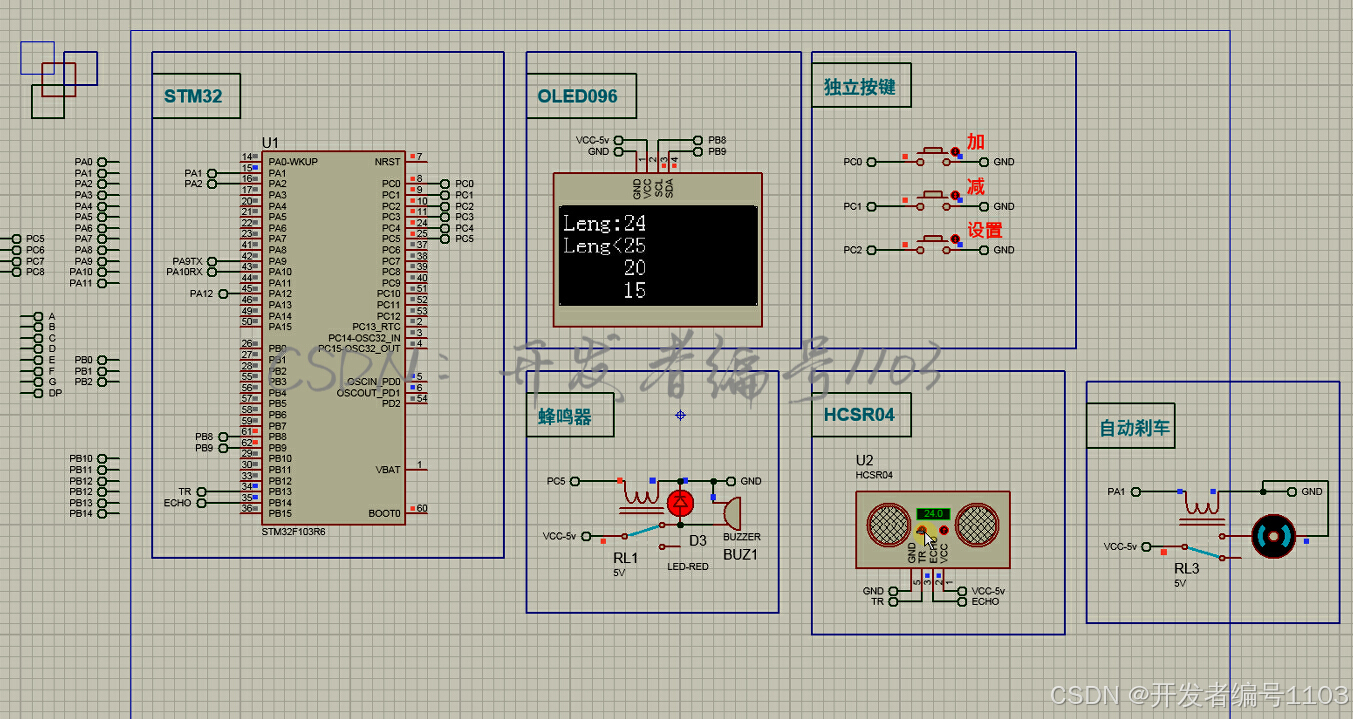
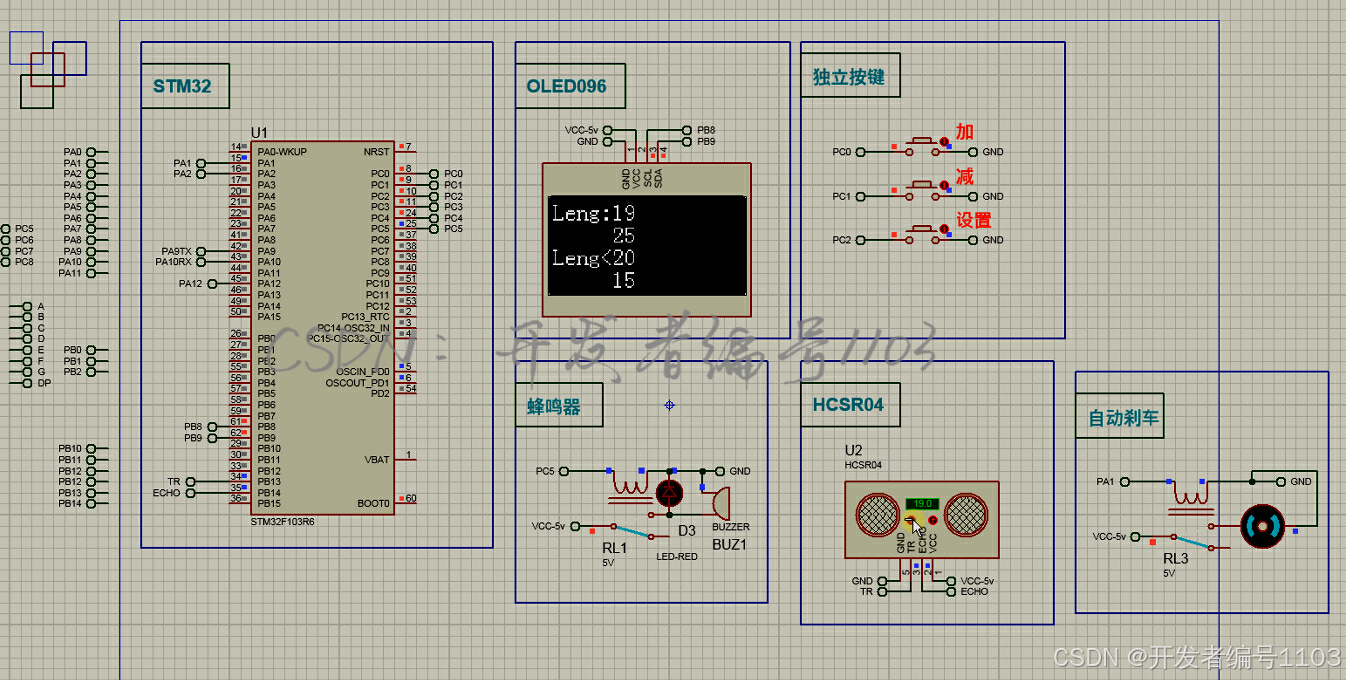
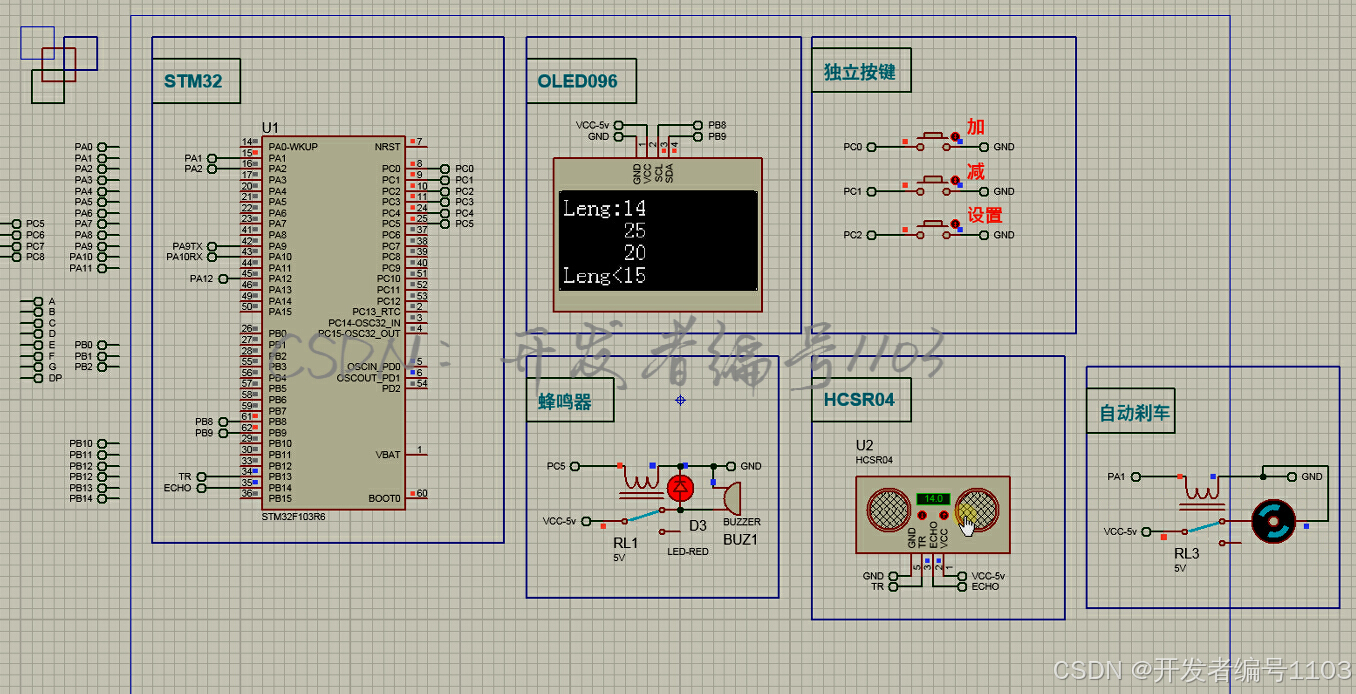
一. 系统概述 系统由STM32单片机作为主控核心,通过超声波测距模块实时检测车后障碍物的距离。当检测到的距离低于预设的阈值时,系统会触发报警提示,并根据具体的距离情况,采用不同的报警方式。当距离过于接近时,系统将自动控制车辆停车,以避免发生碰撞事故。 二. 仿真概述 当检测到的距离小于第一个设定的阈值时,系统会发出报警提示,此时报警频率较低。 当距离小于第二个设定阈值时,系统的报警频率会明显增加,以提醒驾驶员更加警惕。 如果实时检测到的距离低于第三个设定阈值,系统将直接触发停车,并同时发出紧急报警。 用户可以通过设置按键和加减按键方便地调整这三个阈值,以适应不同的使用需求。








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3247
3247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






