









 本文详细阐述了BootLoader刷写过程中的预编程、主编程和后编程步骤,包括各步骤的条件检测、功能服务调用和流程图,旨在帮助技术人员理解和实施这一复杂的技术操作。
本文详细阐述了BootLoader刷写过程中的预编程、主编程和后编程步骤,包括各步骤的条件检测、功能服务调用和流程图,旨在帮助技术人员理解和实施这一复杂的技术操作。
BootLoader刷写
本文章是花费3小时结合多个项目实践总结和整体出来的,欢迎大家交流!
BootLoader刷写章节
①:预编程步骤流程+流程图
1.1 概述
1.2 流程步骤描述
1)整车ECU进入扩展会话
2)刷写条件检测
3)禁止记录DTC
4)关闭通讯
5)读取数据信息
1.3流程图
②:主编程步骤流程+流程图
2.1 概述
2.2流程步骤描述
1)目标ECU进入编程会话
2)解锁LEVEL_FBL安全等级
3)刷写Flashdriver
4)刷写应用程序
5)应用程序兼容性检测
2.3流程图
③:主编程步骤流程+流程图
3.1概述
3.2流程步骤描述
1)重启目标ECU
2)进入扩展会话
3)开启通讯
4)开启DTC记录
5)整车ECU进入默认会话
6)清除目标ECU故障码
3.3流程图
BootLoader 刷写流程
BootLoader刷写分为三个步骤:预编程步骤、主编程步骤和后编程步骤。在刷写流程开始后,诊断设备需以2秒的周期,功能寻址发送诊断在线服务($3E 80),以保持总线上其它ECU的诊断会话;
诊断在线服务($3E)不能打断或影响ECU的任何其他服务
预编程步骤流程+流程图
概述
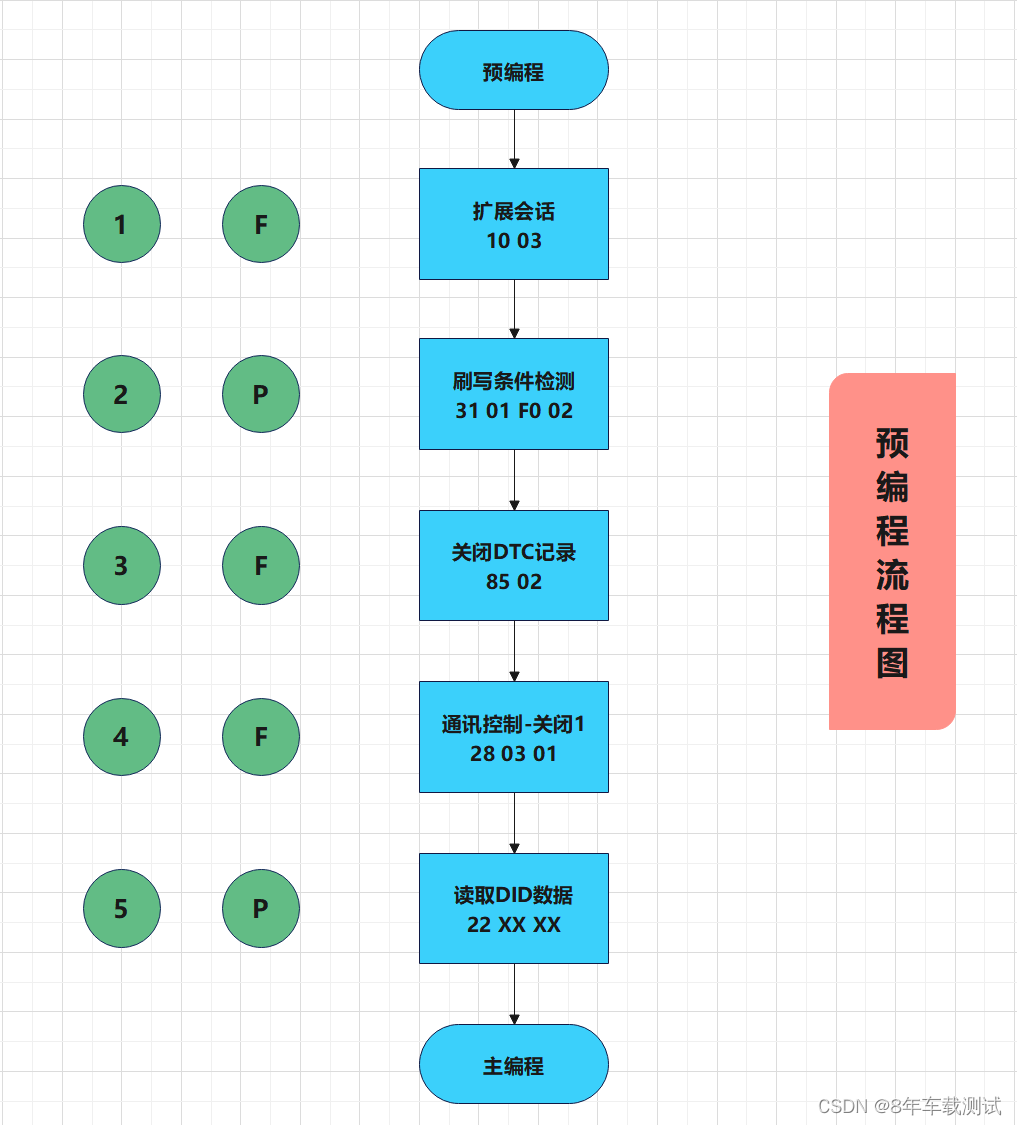
预编程步骤用来做刷写前的CAN网络准备。此步骤的请求报文采用的是物理寻址和功能寻址(P:物理寻址,F:功能寻址)。
流程步骤描述
1)整车ECU进入扩展会话
诊断设备通过功能寻址,发送扩展会话请求($10 03),使整车ECU进入扩展会话。报文发送完成后需延时1s再执行后续步骤。
2)刷写条件检测
a)诊断设备通过物理寻址,发送例程控制服务($31 01 F0 02),此例程控制不需要安全访问,检查目标ECU是否满足刷写条件。
b)在刷写条件检测通过后,目标ECU应立即置位一个标志位,并同时启动一个5秒定时器。当定时器计数超时,或者目标ECU接收到编程会话(10 02)的请求,或者任何原因导致目标ECU重启、复位,此标志位都将清零。
c)此标志位置位时,目标ECU应正确执行编程会话(10 02)的请求。当标志位清零时,目标ECU将不能肯定响应编程会话(10 02)的请求,应对诊断设备发出的切换编程会话(10 02)的请求否定响应NRC22。
3)禁止记录DTC
诊断设备通过功能寻址,使用DTC设置服务($85 02),禁止CAN网络中的ECU记录DTC功能。报文发送完成后需延时1s再执行后续步骤。
4)关闭通讯
诊断设备通过功能寻址,使用通信控制服务($28 03 01),禁止CAN网络中的ECU发送和接收非诊断报文。$28 83 01报文发送完成后需延时1s再执行后续步骤。
5)读取数据信息
a)诊断设备通过物理寻址,读取目标 ECU 数据信息($22),读取内容包括但不限于:ECU 产品信息(F193)、零件号(0xF18C)、供应商代码(0xF18A)、硬件版本号(0xF089)、软件版本号(0xF189)、FBL版本信息(0xF180)、备份区软件版本号(F101)。
b)此步骤是否执行,或者执行读取后,目标ECU的响应内容(肯定响应或者否定响应),都不影响流程的继续执行。
主编程步骤流程+流程图
概述
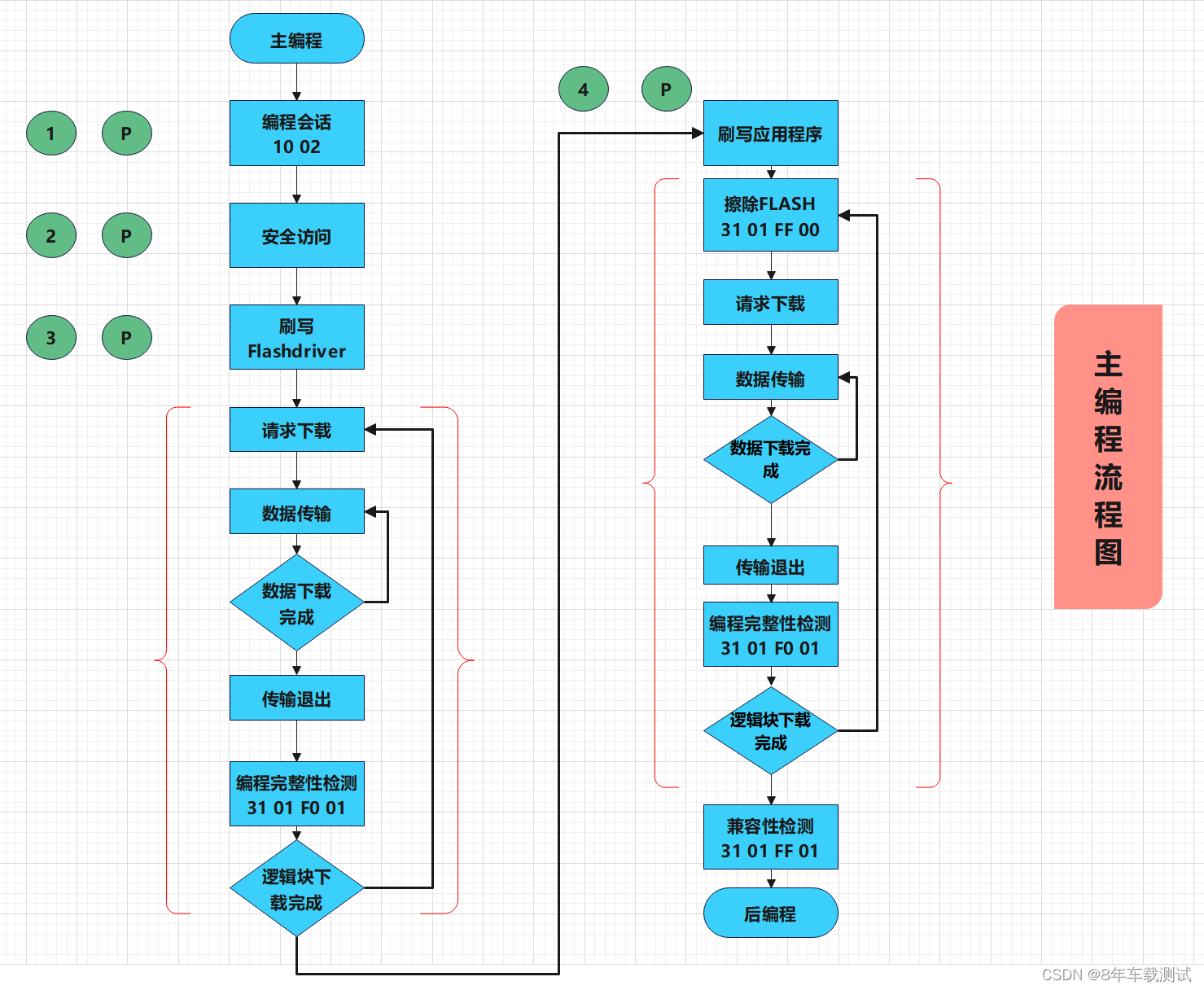
主编程步骤用来编程一个或多个逻辑块。此步骤的请求报文采用的是物理寻址(P:物理寻址)。
流程步骤描述
1)目标ECU进入编程会话
a)诊断设备通过物理寻址,发送编程会话请求($10 02),使目标ECU进入编程会话;
b)进入编程会话后,目标ECU应对刷写请求标志位清零。
2)解锁LEVEL_FBL安全等级
诊断设备通过物理寻址,对目标ECU进行安全访问($27 07/08)。在此安全等级未解锁之前,后续的步骤将不能执行。
3)刷写Flashdriver
a)Flashdriver刷写至目标ECU指定的RAM区域。刷写序列由请求下载($34)、数据传输($36)、请求传输退出($37)和检查编程完整性($31 01 F0 01)4个服务组成;
b) 诊断设备通过物理寻址,发送例程控制服务($31 01 F0 01),包含4个字节的CRC32校验值参数。CRC32校验值用于验证此次下载逻辑块数据的完整性,如果检测不通过或者跳过此步骤直接请求主编程步骤4,目标ECU须拒绝执行,并返回NRC22。
4)刷写应用程序
a)应用程序刷写至目标ECU指定的非易失性存储器区域。刷写序列由擦除FLASH($31 01 FF 00)、请求下载($34)、数据传输($36)、请求传输退出($37)和检查编程完整性($31 01 F0 01)5个服务组成;
b)目标ECU在接收到擦除FLASH指令时,应先对应用程序有效位清零,防止刷写过程没有成功结束而意外执行应用程序。当应用程序有效位清零后,目标ECU才能开始执行擦除FLASH的动作;
c)诊断设备通过物理寻址,发送例程控制服务($31 01 F0 021),包含4个字节的CRC32校验值参数。CRC32校验值用于验证此次下载逻辑块数据的完整性;
5)应用程序兼容性检测
a)应用程序刷写完成后,诊断设备通过物理寻址,发送例程控制服务($31 01 FF 01),检测应用程序的完整性和依赖性。完整性定义为所有的的逻辑块是否全部成功下载;
b)检测通过后,目标ECU应立即置位应用程序有效位。
后编程步骤流程+流程图
概述
后编程步骤主要用来恢复整车CAN网络及DTC记录功能。此步骤的请求报文采用的是物理寻址和功能寻址(P:物理寻址,F:功能寻址)。
流程步骤描述
1)重启目标ECU
诊断设备通过物理寻址,使用复位服务($11 01),使目标ECU重启并跳转到应用程序。
2)进入扩展会话
诊断设备通过物理寻址,发送扩展会话请求($10 03),使目标ECU进入扩展会话。
3)开启通讯
诊断设备通过功能寻址,使用通信控制服务($28 00 03),开启CAN网络中的ECU发送和接收非诊断报文。
4)开启DTC记录
诊断设备通过功能寻址,使用DTC设置服务($85 01),开启CAN网络中的ECU记录DTC功能。
5)整车ECU进入默认会话
诊断设备通过功能寻址,发送扩展会话请求($10 01),使整车ECU进入默认会话。
6)清除目标ECU故障码
诊断设备通过物理寻址,使用清除故障码服务($14),清除目标ECU的故障码。


















 1866
1866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









