






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
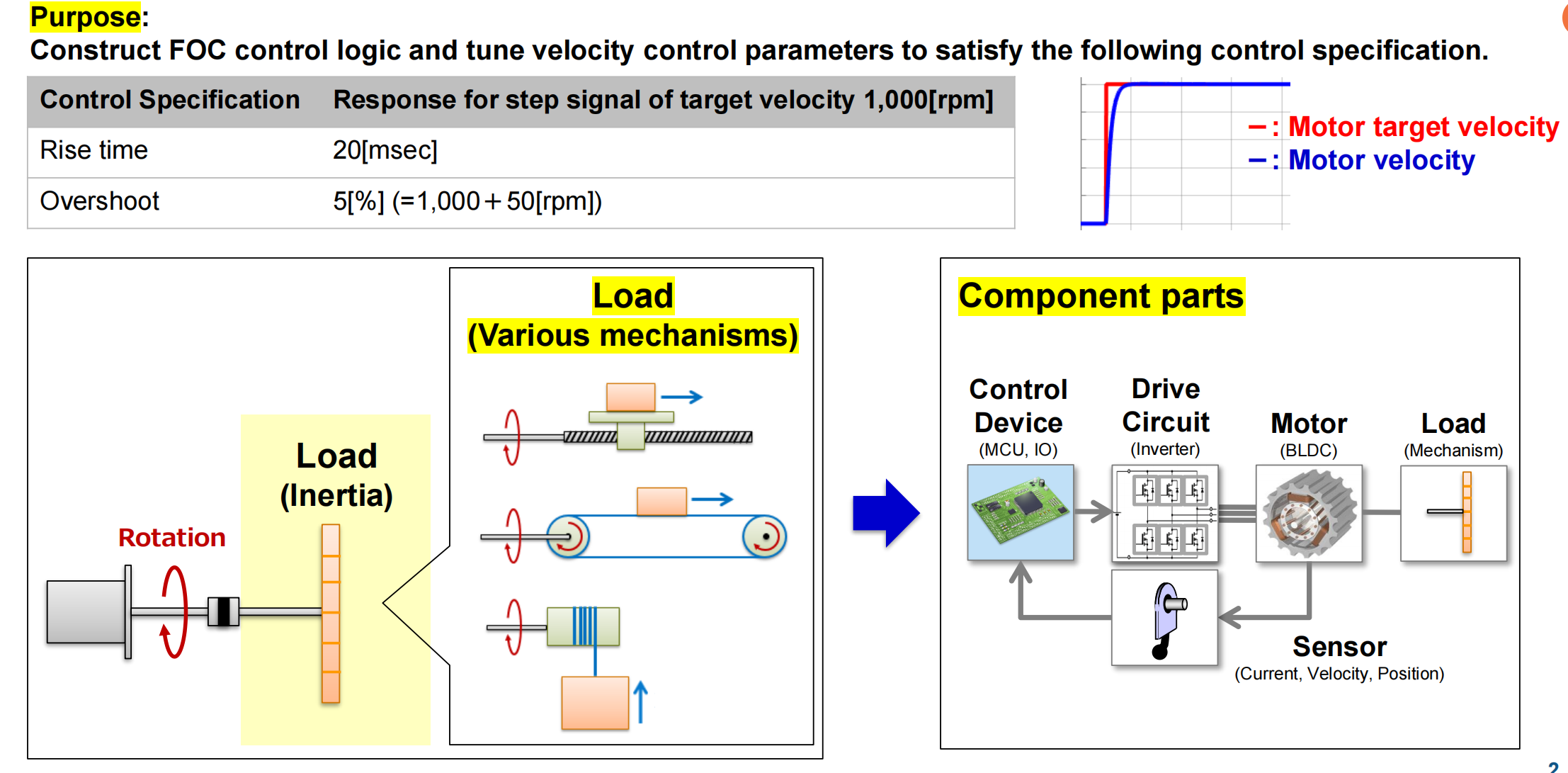
无刷直流电机(永磁同步电机)的矢量控制是一种高级的电机控制技术,通过对电机的电流和磁场进行精确控制,可以实现电机的高效运行和高性能特性。
矢量控制的基本原理是将电机的定子和转子坐标系转换到一个统一的坐标系中,然后对电机的电流和磁场进行独立控制,从而实现对电机的精确控制。
矢量控制的关键技术包括磁场定向控制、电流控制和速度控制。磁场定向控制通过对电机的磁场进行精确控制,可以实现电机的高效运行和高转矩输出。电流控制则是通过对电机的电流进行精确控制,可以实现电机的高效运行和高性能特性。速度控制则是通过对电机的转速进行精确控制,可以实现电机的高效运行和高动态响应。矢量控制技术可以实现对无刷直流电机(永磁同步电机)的精确控制,从而实现电机的高效运行和高性能特性。
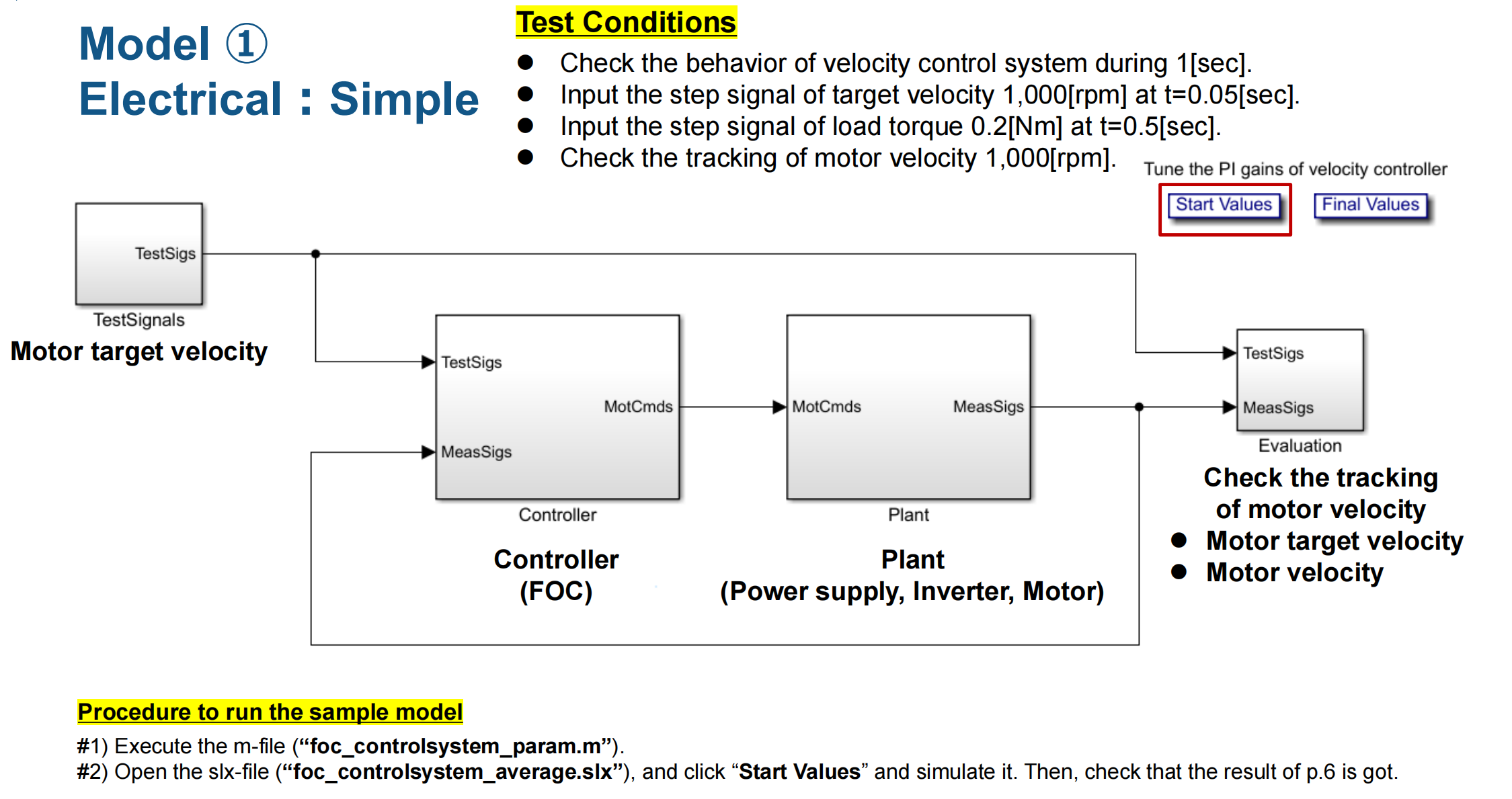
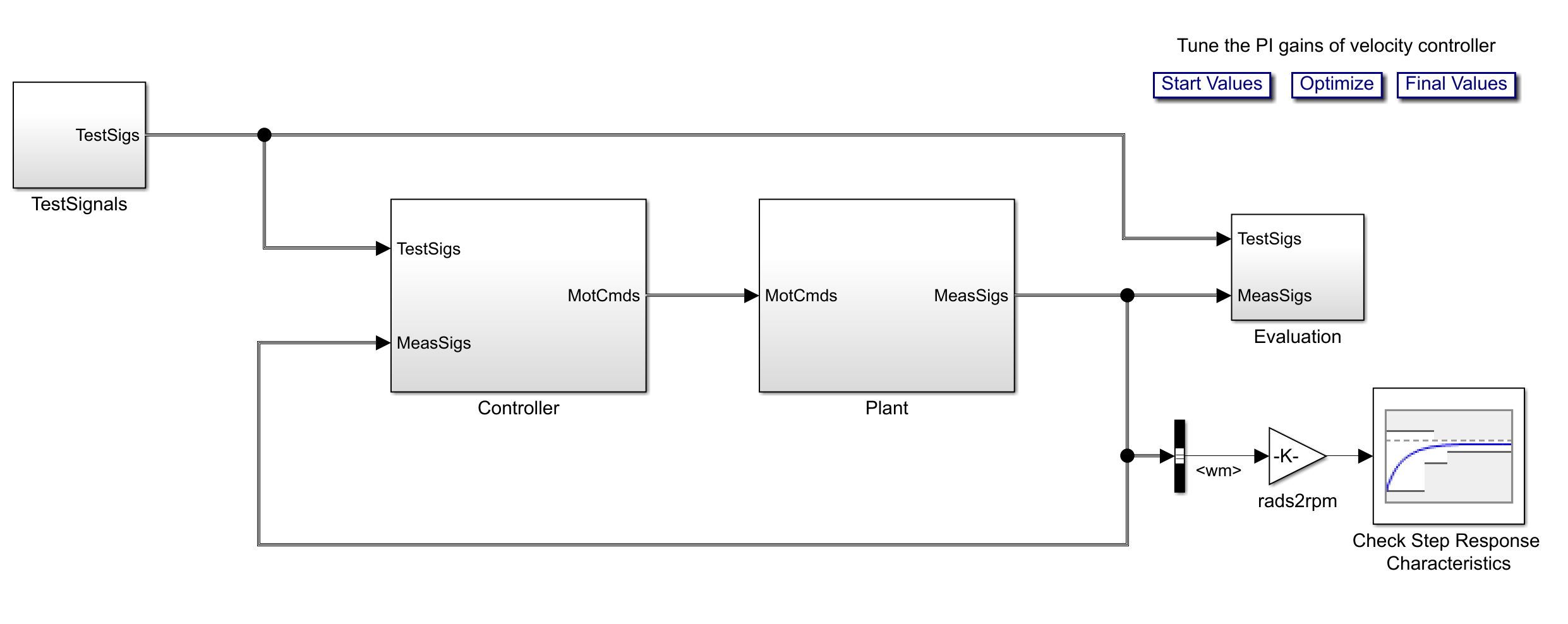
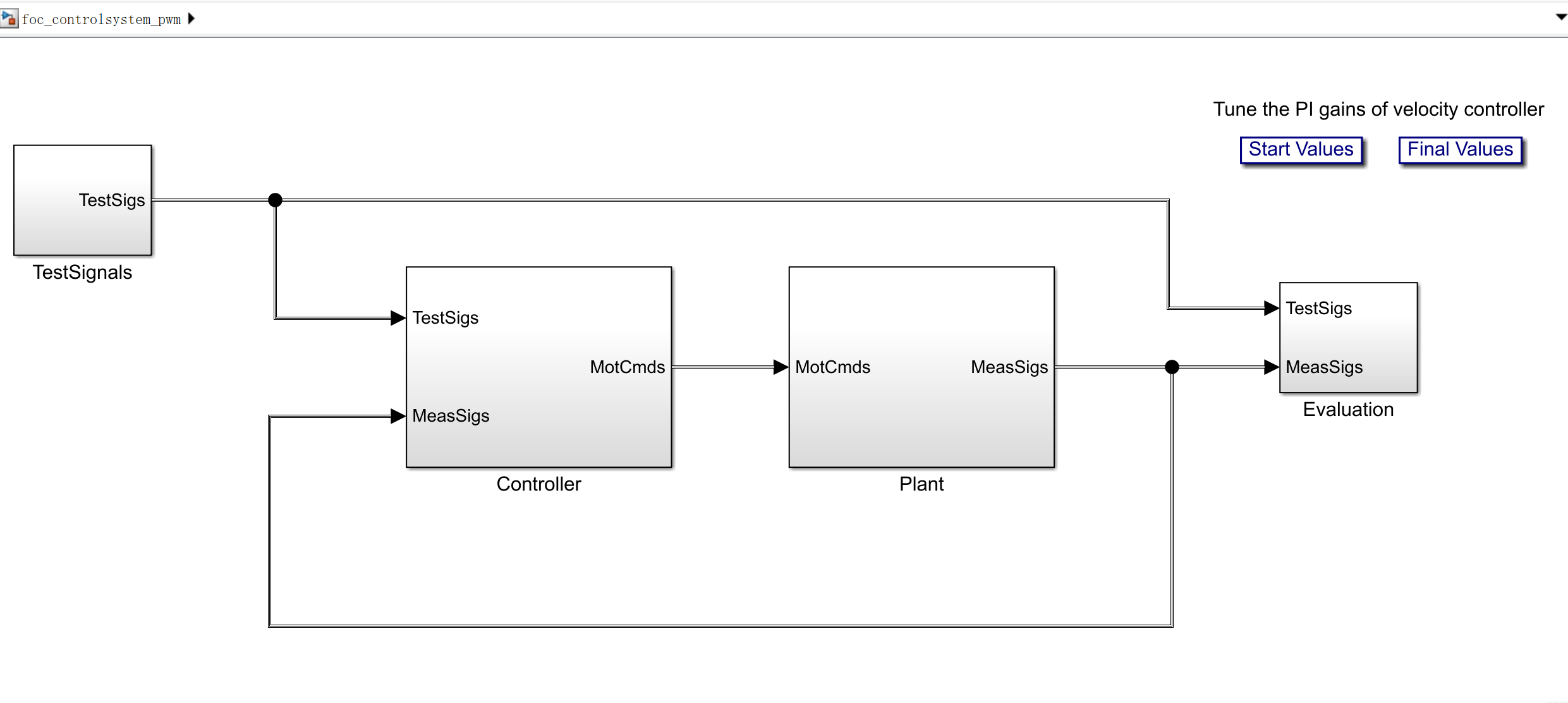
无刷直流电机(永磁同步电机)的矢量控制设计是一项复杂而关键的工程任务,涉及多个方面的建模和控制。在这个设计中,电气和机械系统的建模是至关重要的。我们可以利用Simscape和Simscape Electrical进行电气和机械植物建模,以便更好地理解系统的动态特性和响应。
此外,矢量控制的坐标转换和PI增益调整也是设计过程中的关键步骤。通过使用Simscape Electrical、Simulink Control Design以及Control System Toolbox,我们可以进行精确的坐标转换和PI增益的优化,以实现对电机的精准控制。
在模型中包括PWM控制的同时,自动调整控制参数也是必不可少的。利用Simulink Design Optimization和Optimization Toolbox,我们可以实现对模型中控制参数的自动调整,从而确保系统能够在不同工况下都能够保持稳定的性能。
综上所述,无刷直流电机(永磁同步电机)的矢量控制设计涉及到多个方面的工程技术,需要充分利用Simscape、Simscape Electrical、Simulink Control Design、Control System Toolbox、Simulink Design Optimization和Optimization Toolbox等工具来完成全面而精确的设计和优化。
详细文档见第4部分。
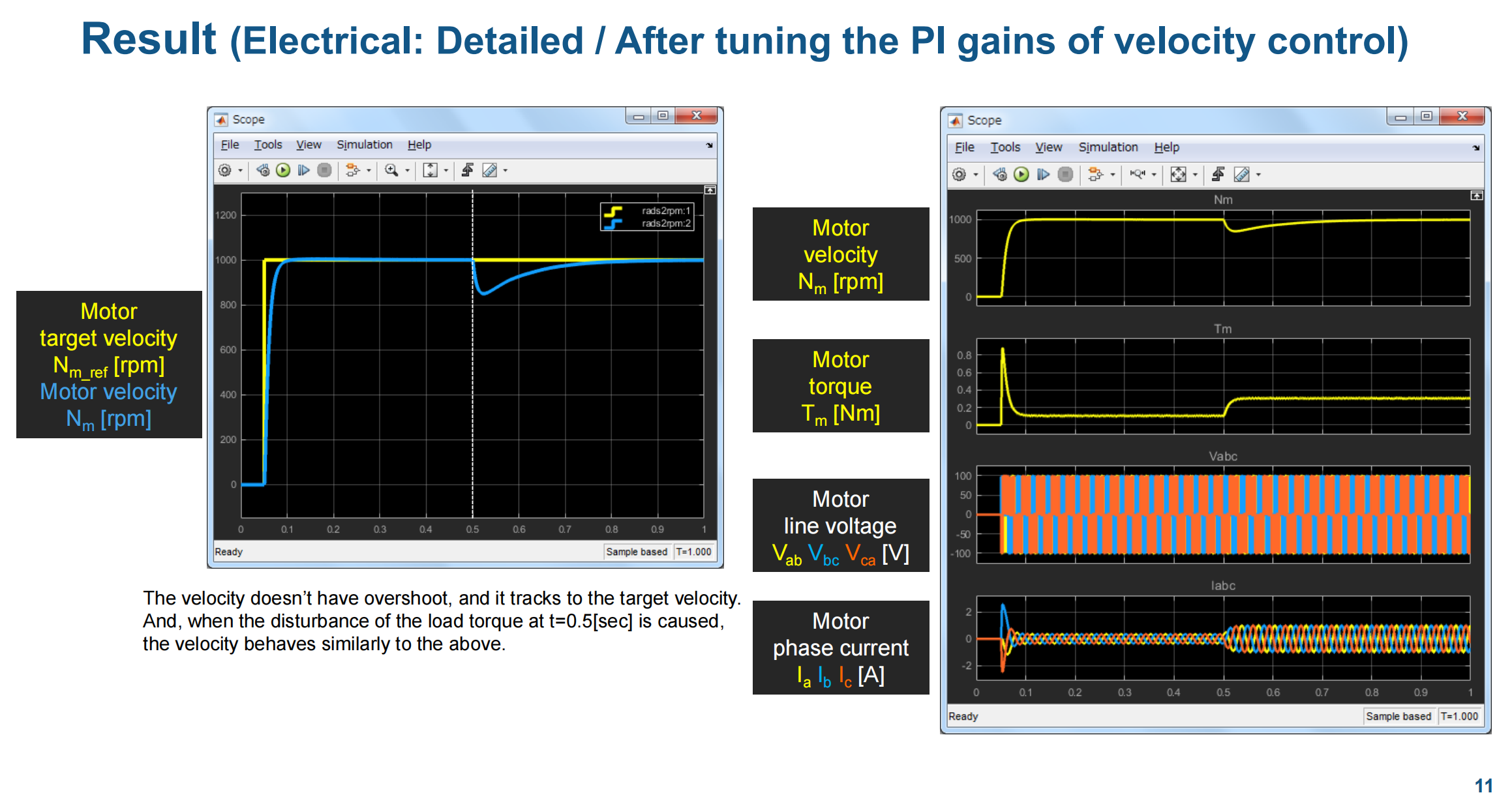
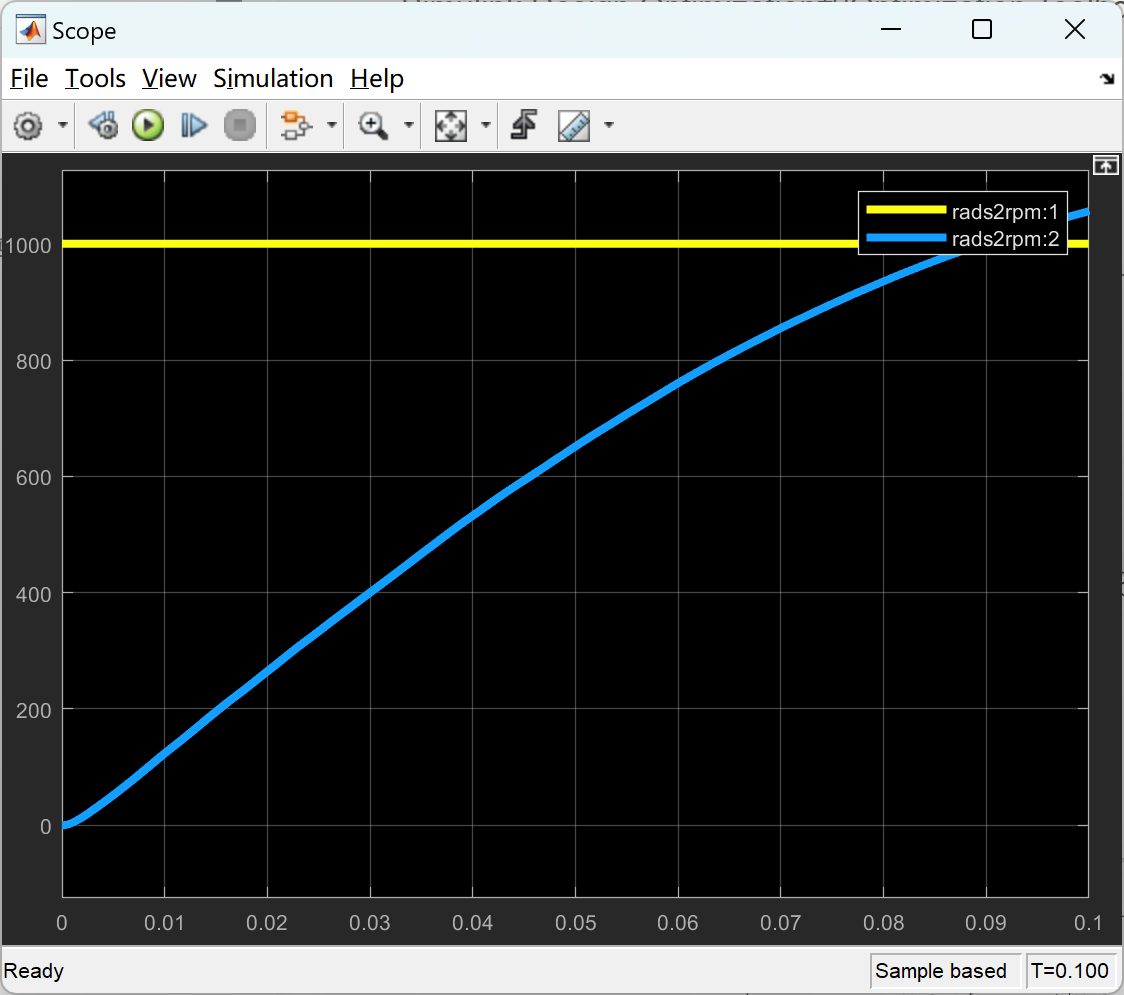
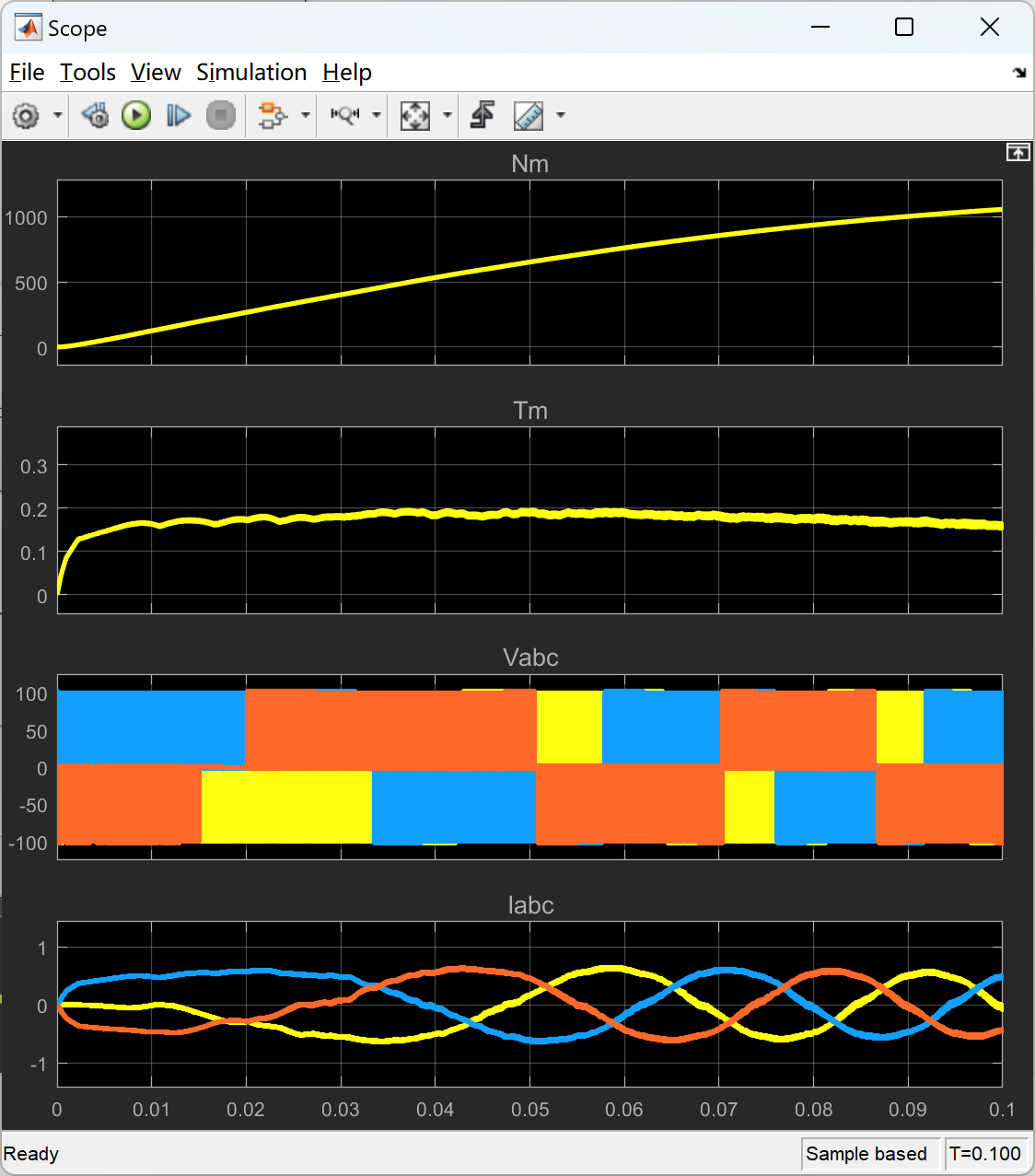
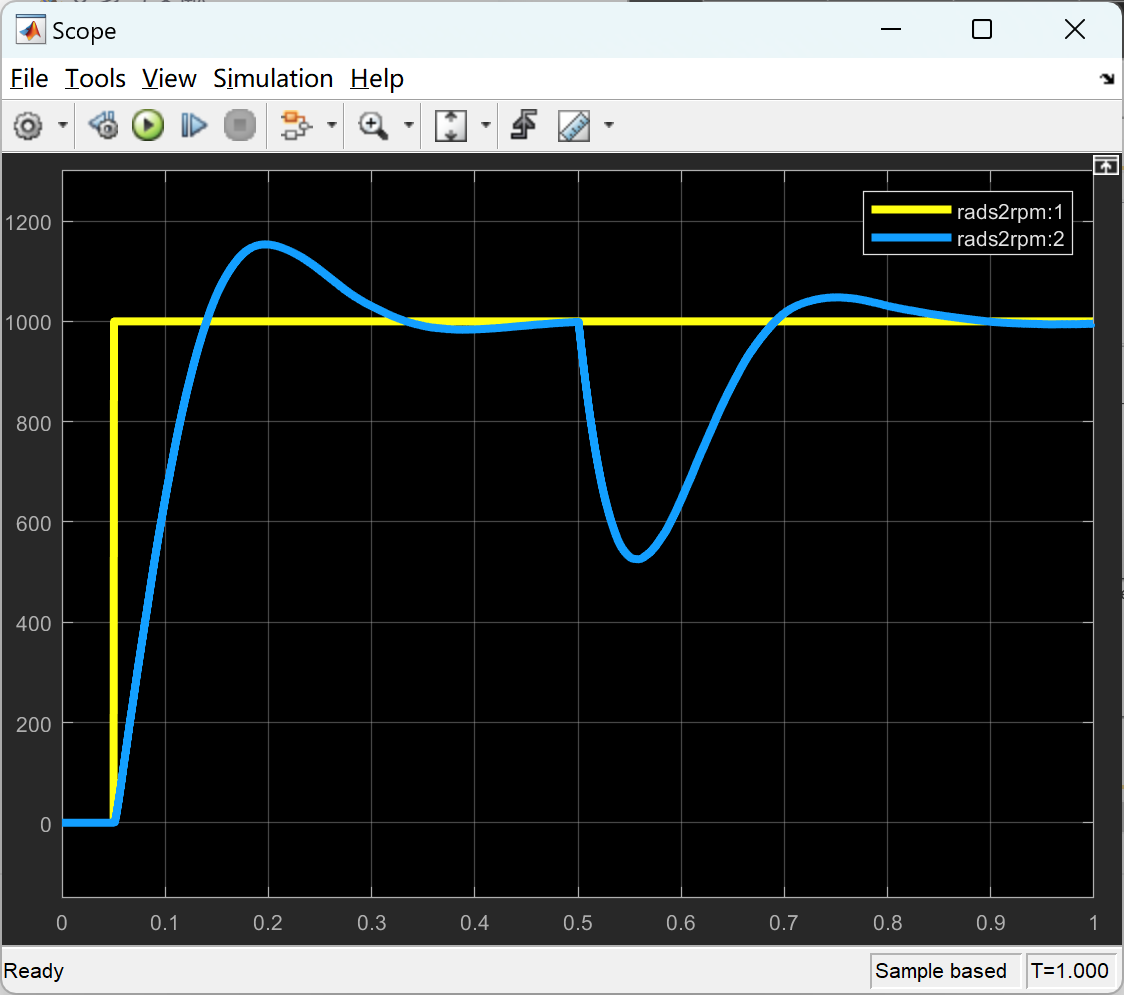
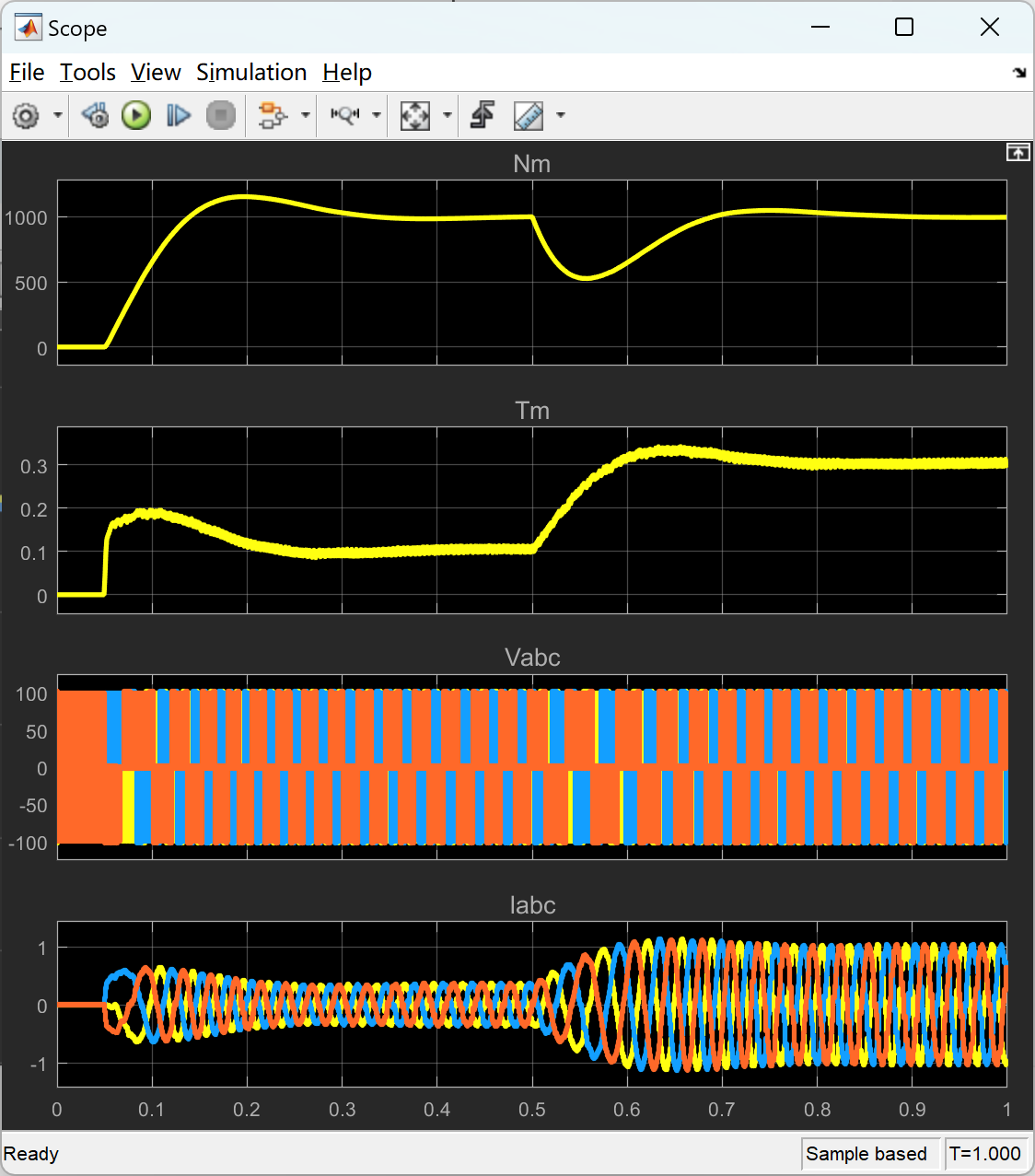
📚2 运行结果
部分代码:
%% PMSM
Phi = 0.1; % Permanent magnet flux linkage [Wb]
Ld = 0.01; % Stator d-axis inductance [H]
Lq = 0.02; % Stator q-axis inductance [H]
Rs = 0.38; % Stator resistance per phase [惟]
p = 2; % Number of pole pairs
Jm = 0.1e-3; % Rotor inertia [kg*m^2]
Dm = 1e-3; % Rotor damping [N*m/(rad/s)]
%% Inverter
Vdc = 100; % DC voltage [V]
fc = 10e3; % Carrier Frequency [Hz]
Ts = 1/fc/100; % Sampling time [sec]
%% Current controllers of dq-axis (PI controller)
% Ld/Rs = 0.0263[sec];
% Lq/Rs = 0.0526[sec];
% Target response time constant: 1e-3[sec]
wc_c = 1e3; % Target response frequency [rad/s]
Kp_id = wc_c*Ld; % d-axis proportional gain
Ki_id = wc_c*Rs; % d-axis integral gain
Kp_iq = wc_c*Lq; % q-axis proportional gain
Ki_iq = wc_c*Rs; % q-axis integral gain
% Tcc = 100e-6; % Sample time of current control [sec]
%% Velocity controller (PI controller)
% Jm/Dm = 0.1[sec];
% Target response time constant: 0.02[sec]
wc_s = 50; % Target response frequency [rad/s]
Kp_s = 0.0014; % Velocity proportional gain
Ki_s = 0.041; % Velocity integral gain
% Kp_s = wc_s*Jm; % Velocity proportional gain
% Ki_s = wc_s*Dm; % Velocity integral gain
% Tsc = 1e-3; % Sample time of velocity control [sec]
版本2018a及以上。
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]邢美丽.面向无刷直流电机与永磁同步电机的通用型功率级模拟器设计[D].北京工业大学[2024-01-22].
[3]范欣林.低功率永磁同步电机和无刷直流电机驱动器硬件设计[J].电子测试, 2015(1X):3.DOI:10.3969/j.issn.1000-8519.2015.02.010.
[3]李继堂.矢量控制永磁同步电机伺服系统的研究[D].大连理工大学,2008.DOI:CNKI:CDMD:2.2007.210500.















 1635
1635











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









