






电机控制器,电动车电驱方案,主动阻尼控制,damping control,转矩补偿,振动、谐振抑制
公司多个量产实际项目中用的,
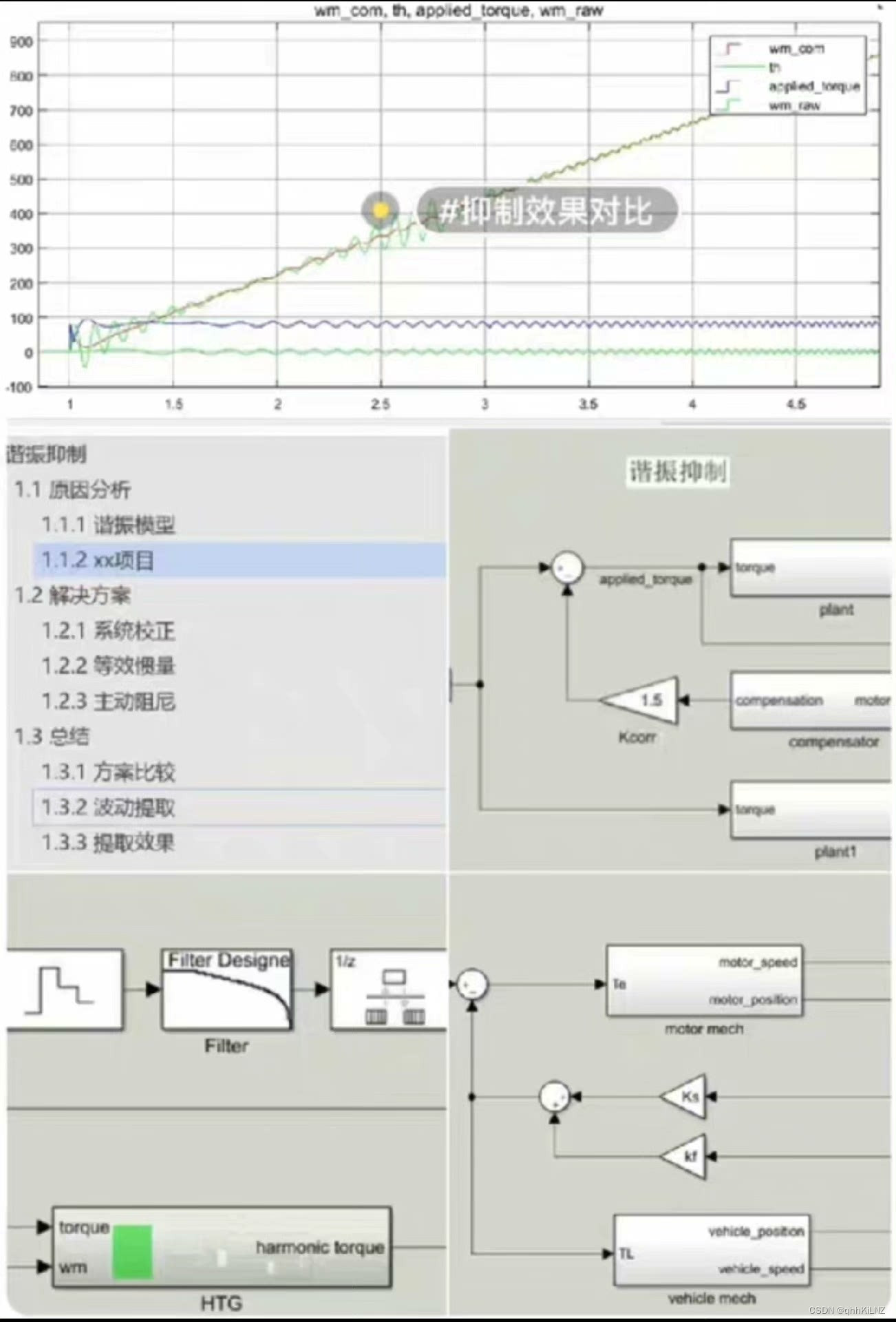
matlab二质量模型…
使用巴特沃斯高通滤波器提取转速波动进行转矩补偿,实现主动阻尼
加速度反馈: 等效增加电机惯量
提供详实文档、仿真模型…
效果如图,可将绿色曲线中明显的波动抑制,达到红色曲线效果…
电动车电驱方案中的电机控制器是一个重要的组成部分。为了提高电机的性能和稳定性,许多公司在实际项目中采用了主动阻尼控制技术。其中,转矩补偿和振动、谐振抑制是主要的研究方向。
在电机控制器中,使用了巴特沃斯高通滤波器对转速波动进行提取。通过对转速波动的分析,可以得到电机的转矩输出。然后,使用转矩补偿技术来实现主动阻尼。主动阻尼是通过改变电机的转矩输出来对抗振动和谐振现象的一种方法。
在实际应用中,加速度反馈是一个重要的参数。通过等效增加电机的惯量,可以提高系统的稳定性和鲁棒性。该方法可以通过改变电机的转矩输出来实现。
为了验证该方案的有效性,我们提供了详实的文档和仿真模型。通过仿真模型,我们可以清楚地看到转矩补偿技术的效果。如图所示,我们可以将绿色曲线中明显的波动抑制,达到红色曲线的效果。
在实际应用中,该方案已经在多个量产项目中成功应用。通过使用电机控制器的主动阻尼控制技术,电动车的性能和稳定性得到了显著的提升。同时,该方案还可以有效抑制振动和谐振现象,并提供了稳定的转矩输出。
总之,电机控制器在电动车电驱方案中起着至关重要的作用。通过使用主动阻尼控制技术和转矩补偿技术,可以提高电机的性能和稳定性。我们提供了详实的文档和仿真模型,验证了该方案的有效性。希望这篇文章能够为读者提供有关电机控制器和电驱方案的技术分析和应用参考。
相关代码,程序地址:http://imgcs.cn/lanzoun/701789670407.html















 358
358











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









