







一、项目流程
1、需求分析
| 问题 | 说明 |
| 确定检测物体 | 确定检测的⽬标物是什么?形状?尺寸?材质? |
| 检测哪些指标 | 具体检测什么指标?有⽆?状态?尺⼨?位置?粘连?差异?毛刺?颜色? |
| 分辨率 | 精度要多高 |
| 检测速度 | 每分钟多少个 |
| 安装空间 | 工作距离多少?被测零件周围是否有安装光源的位置?是否有适合安装摄像机头的位置?怎样固定比较合适? |
| 颜⾊ | 被测物体是什么颜⾊?我们是否需要对颜⾊判别?是否可以利⽤颜⾊差异帮助测⽬的? |
| 合格判据 | 合格/不合格的定义 |
| 工位信号 | 信号触发拍照还是自动连续拍照 |
| 剔除或控制⽅式 | 是否需要⾃动剔除残次品或控制机器动作?怎么样对不合格品进⾏剔除? |
| ⼯作环境 | ⼯作环境的温度、湿度、粉尘、 防水、干扰光线等情况 |
| 交货⽇期 | 重要 |
2、方案设计
方案评估(整体架构 人员 时间 成本 技术指标)
方案设计(硬件-镜头 相机 光源 支架 软件-VS 语言 视觉平台 库)
难度 合同
3、概要设计
包含软件架构体系,视觉开发环境(vc++联合halcon还是c#联合halcon等),怎么通讯、怎么识别 等
4、详细设计
每⼀个功能模块怎么做,包括图像采集模块、处理模块、算法模块,通讯模块等。通常将每个模块形成⼀个动态链接库, 调⽤相应的接⼝函数即可,项⽬图像采集调⽤SDK也是调⽤动态库的过程。
5、编码,调试,测试
6、交付
7、维护升级
二、相机、镜头、光源参数以及选型
相机参数:
面阵相机
1、分辨率:指相机所能捕捉到图像的像素数量,通常用图像的宽高表示,单位:像素
2、曝光时间:快门打开的时间,光信号转电信号(越长电信号越大,越亮),全局曝光、卷帘曝光(逐行曝光)---影响帧率
3、帧率:每秒采集多少张图片
4、靶面尺寸:传感器对角尺寸
5、后背焦:相机接口的端面到传感器中心沿着光轴的距离
6、机械接口:c,cs接口(C接口的镜头---C接口相机 CS接口镜头---CS接口相机 C接口镜头--接圈----CS接口相机 CS接口镜头不可以对接C接口相机)
7、增益:电流增大,不影响帧率,过大有雪花点
8、白平衡:
9、电信号接口:USB(2.0 3.0) GiGe以太网
10、像元尺寸:像元大小和像元数(分辨率)共同决定了相机靶面的大小
11、信噪比:相机的信噪比定义为图像中信号与噪声的比值(有效信号平均灰度值与噪声均方根的比值),代表了图像的质量,图像信噪比越高,相机性能和图像质量越好。
线阵相机
1、行频:20kHZ = 每秒20000行
镜头参数:
普通镜头(CCTV FA)
1、焦距(f):镜头光学中心到焦平面形成清晰图像所在平面之间的距离
焦距=(工作距离*传感器尺寸)/视野
焦距小,视野大,畸变大,放大倍率小
焦距大,视野小,畸变小,放大倍率大
2、工作距离(WD):镜头第一个面到受检物体的直线距离
3、视野(Fov):相机所能监控的视野
4、分辨率:镜头的分辨率大于等于相机的分辨率
5、后截距:镜头最后一个面到传感器中心的距离
6、靶面尺寸:镜头的靶面尺寸大于等于相机的靶面尺寸,否则产生四个黑角
7、畸变:实际像点与理想像点之差(切向畸变--装配、镜头引起 径向畸变--桶形<0,枕形>0)
8、放大倍率(M):传感器的尺寸/视野 = 像高/物高 = M
9、机械接口:c,cs接口(C接口的镜头---C接口相机 CS接口镜头---CS接口相机 C接口镜头--接圈----CS接口相机 CS接口镜头不可以对接C接口相机)
10、景深(Dov):焦平面前后一定距离还能清晰成像的纵深距离
景深与焦距、光圈大小成反比,与工作距离成正比
11、光圈、光圈系数(F):光圈数=焦距f/光圈(通光孔径) 光圈系数值越小,光通量越大
拍摄高速运动物体、曝光时间很短的应用中,应该选用小光圈系数的镜头,以提高图像亮度
对亮度要求较低,精度要求高的项目,可以选用光圈系数大的镜头
远心镜头(物方远心 像方远心 双远心)---平行光成像
注意放大倍率
可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化
光源:
光的衍射:波长越长越容易发生衍射,红光波长长,蓝光波长短
光源的作用:
①强化特征,弱化背景
②突出测量特征
③提高图像信息
④简化算法
⑤减低系统设计的复杂度
⑥提高系统的检查精度、速度
为什么要选择LED光:设计自由、寿命长、热效能好,反应迅速,价格低
环形光、环形无影光、条形光、同轴光源(高反光表面检测)、碗装光源(曲面、凹凸、弧形表面检测)、背光源
光源技巧:
加接圈意义:减少工作距离,减少视野
同轴光放高打亮膜表面,放低打亮膜下方物体
划痕,凹凸(杂乱,各种方向性)用45°环光打亮划痕
反光表面缺陷提取:镜头加偏振片(转动)+环形光+光源偏振片
选型:
相机
1、相机传感器的选择(CCD/CMOS):工业一般选择CMOS
2、色彩选择:黑白相机
3、分辨率选择:
传感器尺寸边长(mm)=对应边像元大小(um)*像素个数 / 1000
能得到被测物尺寸和精度
精度=单方向视场大小/相机单方向分辨率
(1)先判断视野:图像应该占相机靶面70~80%为最佳的选择:视野=被测物尺寸/75%
(2)算出分辨率:短边像素个数=视野/精度 防止像素波动影响精度:算出的边像素要乘以3-5倍
注意:问能否达到2个丝的精度,也就是说在那副图像中,每个像素点代表的长度是否小于0.02mm
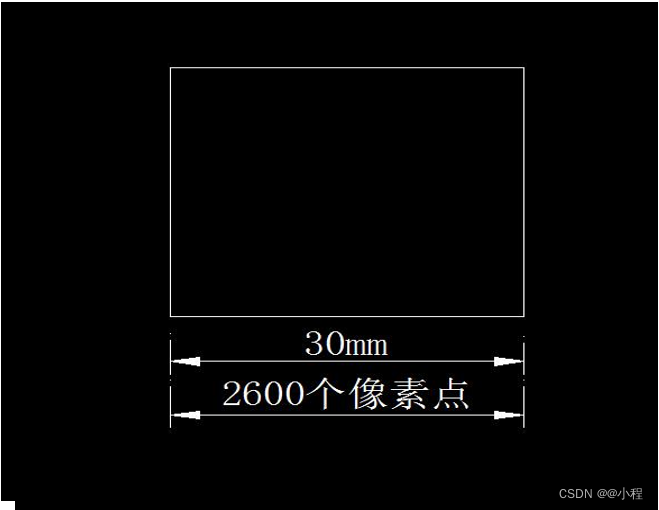
30÷2600≈0.011mm
0.011*5>0.2 不能达到精度要求
镜头
1、确定相机后选镜头(尺寸,接口,分辨率)
精度要求高,选远心镜头
精度要求低,选FA镜头
2、如果景深有要求,选择小光圈镜头
3、选焦距(焦距=(工作距离*传感器边尺寸)/视野)
如果选择远心镜头,则只用考虑放大倍率(放大倍率=传感器尺寸/视野)
光源的选型方法
保证照射所拍摄视野内区域亮度一致、均匀
1、根据视野大小(原理上光源的大小是视野大小的两倍左右)
2、根据物体的形状选择适合的光源
3、根据所检测物体的颜色选择光源
4、根据合适的拍照角度选择光源
三、厂家
相机:海康,基恩士,康耐视,大恒,深视
镜头:海康,基恩士,康耐视,大恒,深视
光源:海康,斯奥特,瑞视,明基光电















 1700
1700











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









