






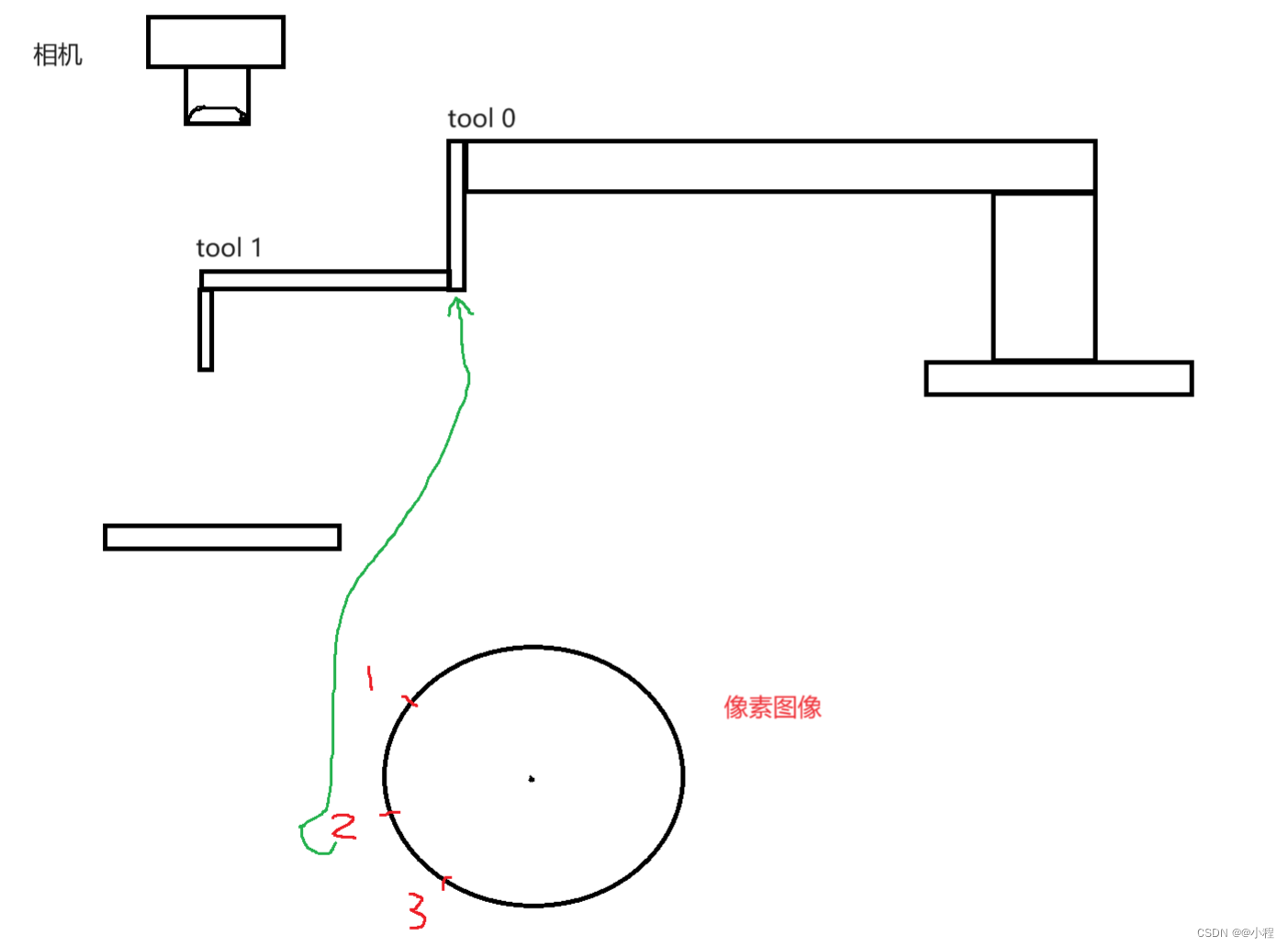
tool 0是u轴,tool1是延长杆,要绕tool1做旋转中心
1、相机做九点标定
2、把tool1移动到相机下,拍三张图,找到像素中心,拟合圆
点2是拍照位姿态,拍照求像素圆心,上下旋转点2、点3求圆心o
点2实际对应的就是tool0
3、三点拟合像素圆,求出圆心,因为圆心到点2与延长杆是同线的,求出tool1像素坐标
4、在点2处创建模板,模板从料盘取过来创建,保存,然后查找模板(Rowo, Columno,Angle)
5、绕tool1旋转把实例转模板,得到tool0的仿射变换后的像素坐标,转实际发给机器人
*绕tool1旋转
vector_angle_to_rigid (tool1X, tool1Y, Angle, tool1X, tool1Y, 0, HomMat2D1)
affine_trans_point_2d (HomMat2D1, Rowo, Columno, Qx, Qy) //把模板中心仿射变换
affine_trans_point_2d (HomMat2D111, Qx, Qy, Qx1, Qy1) //乘九点矩阵得到实际坐标
发给机器人先绕tool0把角度实例转模板(u-Angle),再把绕tool1仿射变换过的tool0坐标发给机器人,一起走就是在tool1处角度转正
6、效果图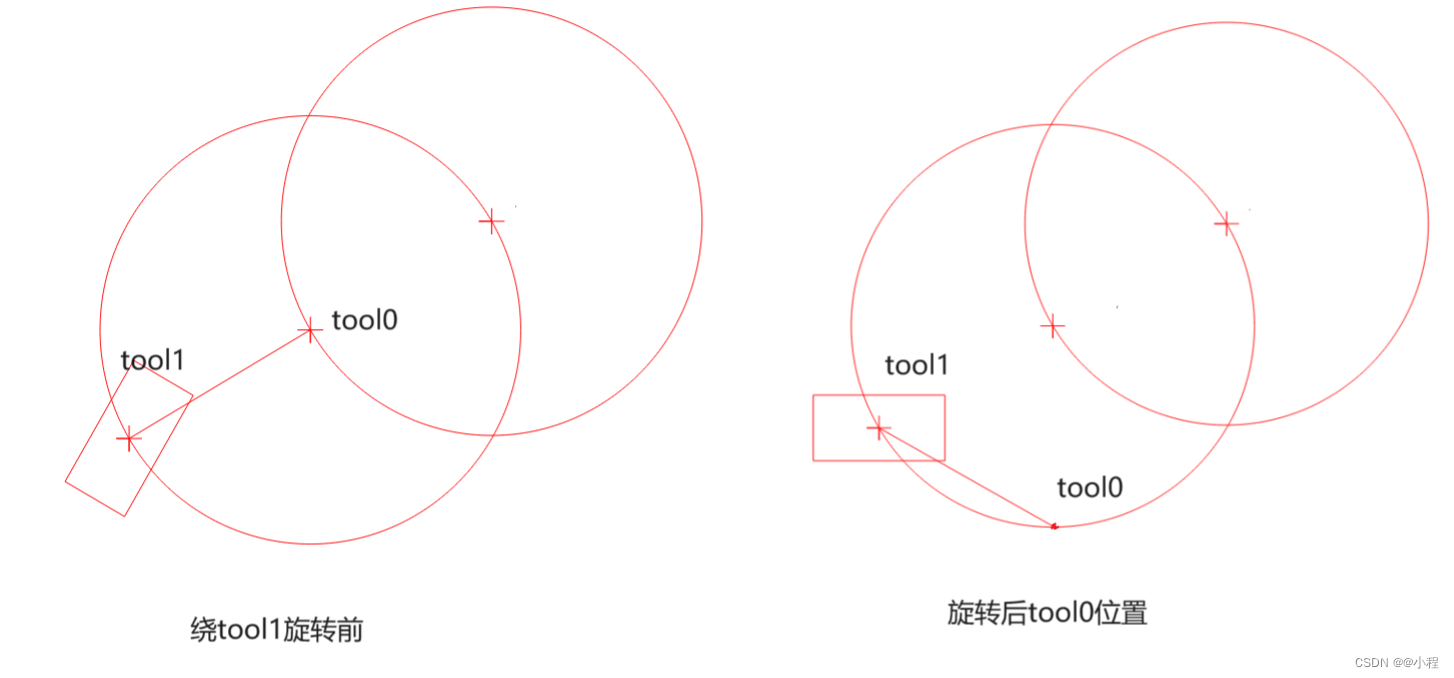















 4792
4792











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









