






实现流程:
一、新建功能包,导入依赖
二、编写 urdf 文件
三、在 launch 文件集成 URDF 与 Rviz
四、在 Rviz 中显示机器人模型
需求:在 Rviz 中显示一个盒状机器人
1、创建功能包,导入依赖
创建一个新的功能包,名称自定义,导入依赖包:urdf与xacro
在当前功能包下,再新建几个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件
config: 配置文件
launch: 存储 launch 启动文件

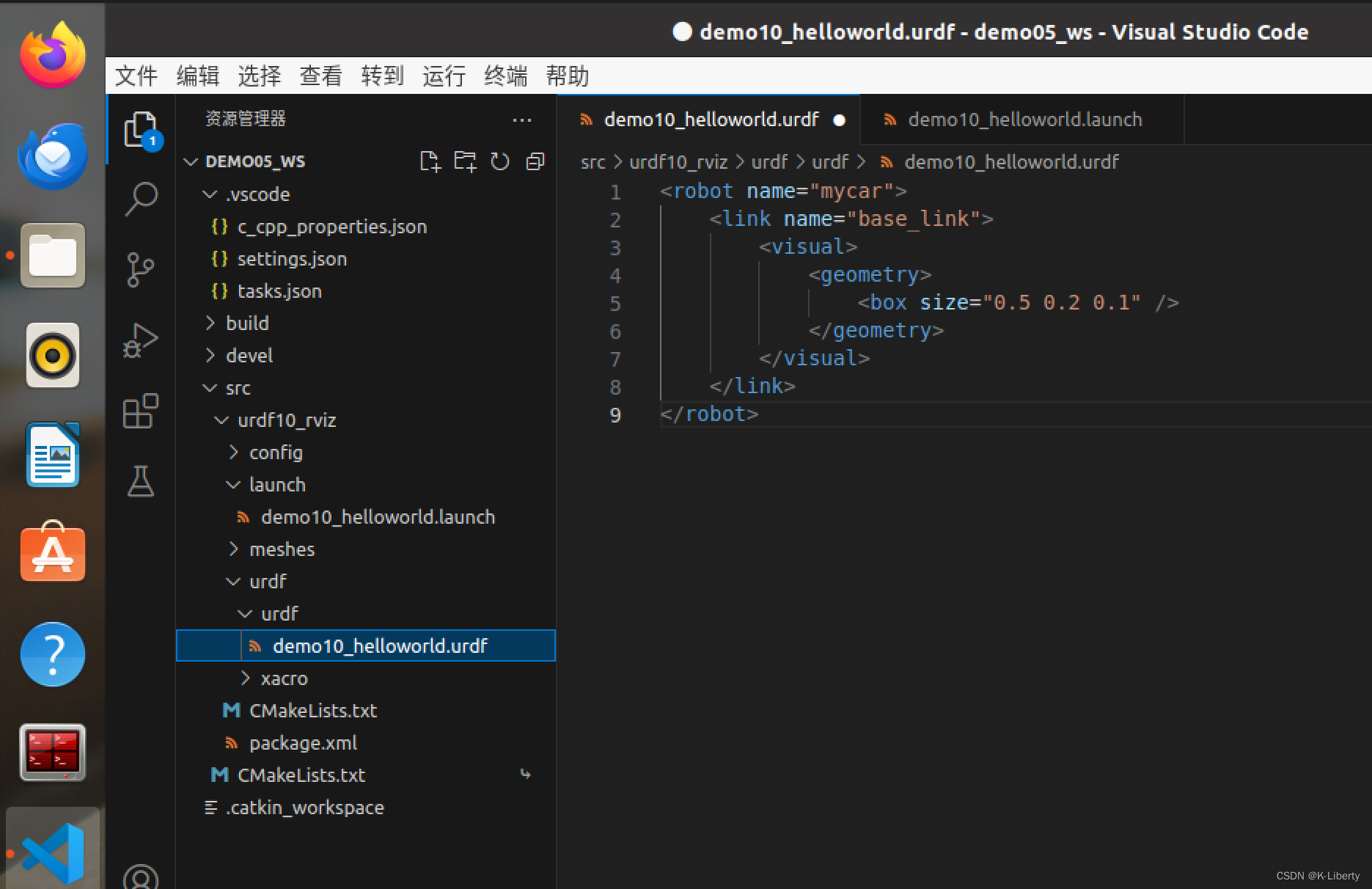
2、编写 URDF 文件
新建一个子级文件夹,文件夹中添加一个.urdf文件,
3、在 launch 文件中集成 URDF 与 Rviz
在launch目录下,新建一个 launch 文件,该 launch 文件需要启动 Rviz,并导入 urdf 文件,Rviz 启动后可以自动载入解析urdf文件,并显示机器人模型,
在 ROS 中,可以将 urdf 文件的路径设置到参数服务器,使用的参数名是:robot_description,

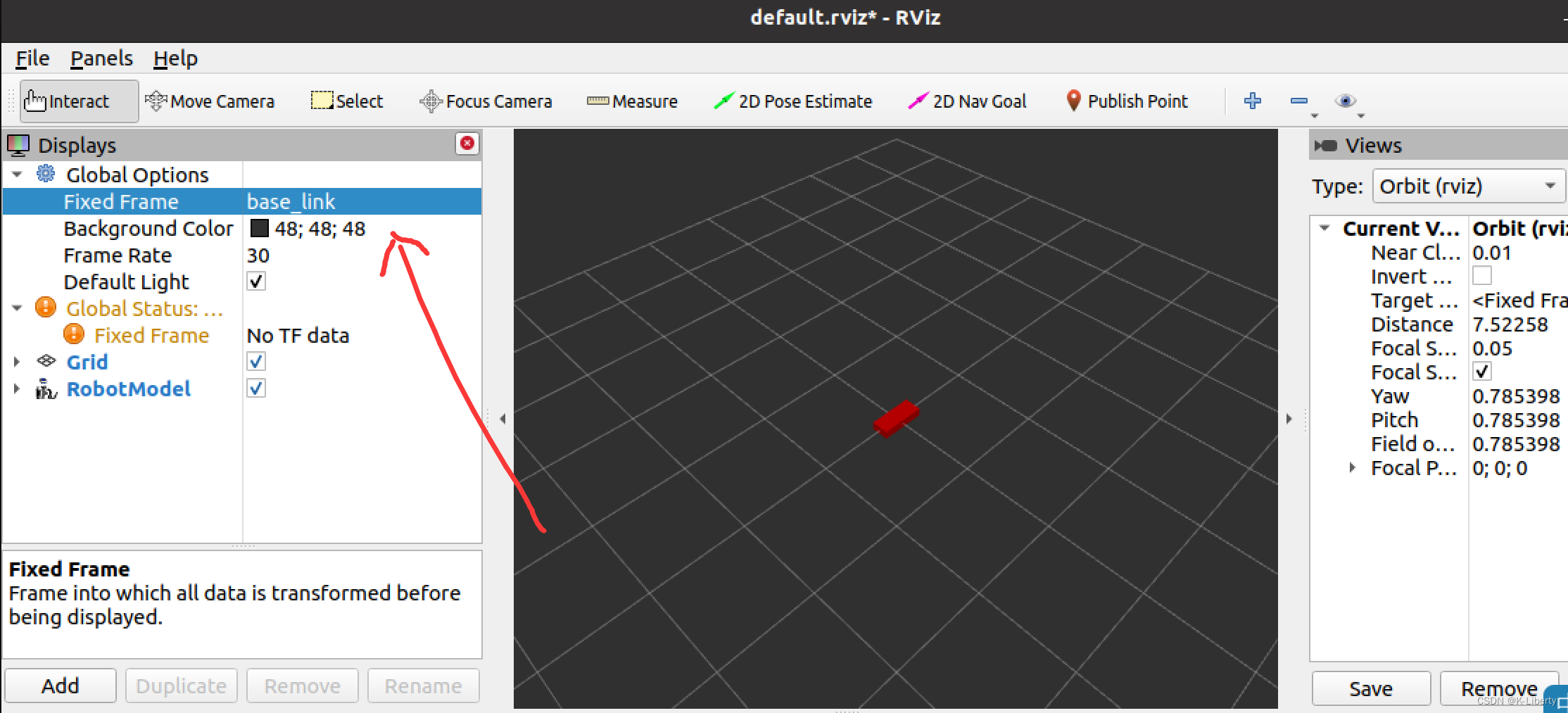
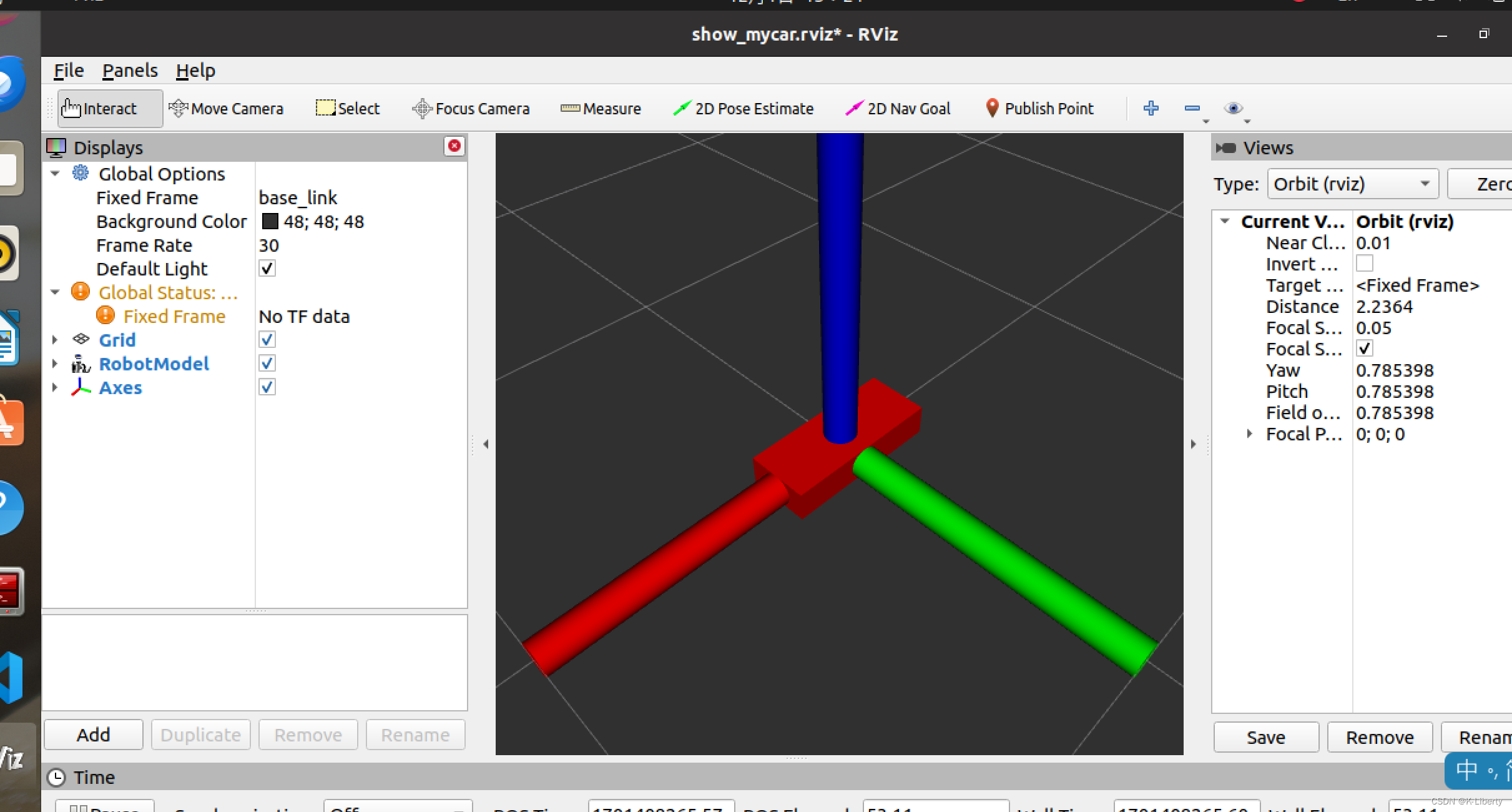
4、在 Rviz 中显示机器人模型
rviz 启动后,会发现并没有盒装的机器人模型,(默认情况下没有添加机器人显示组件,需要手动添加)添加方式如下:



5、优化 rviz 启动
重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行4的操作,为了方便使用,可以使用如下方式优化:
首先,将当前配置保存进config目录,然后,launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径,再启动时,就可以包含之前的组件配置了,使用更方便。


















 517
517











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









