







第一章 相机
1.1 理论基础
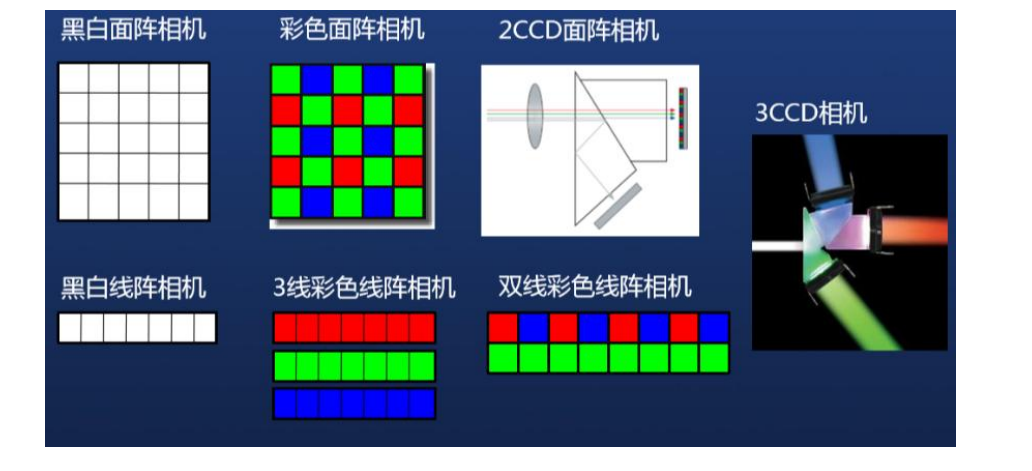
1.1.1 相机分类
1
)按照芯片类型:
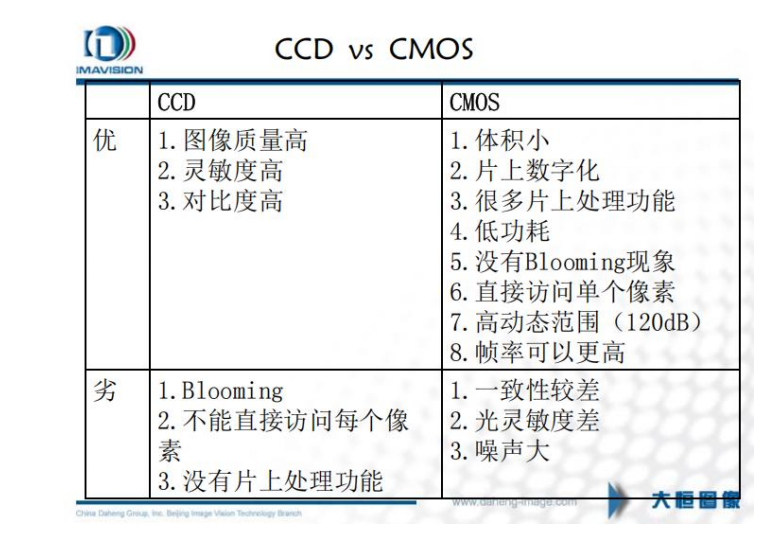
CCD
相机、
CMOS
相机
2
)按照传感器的结构特性:线阵相机、面阵相机
3
)按照扫描方式:隔行扫描相机、逐行扫描相机
4
)按照分辨率大小:普通分辨率相机、高分辨率相机
5
)按照输出信号方式:模拟相机、数字相机
6
)按照输出色彩:单色(黑白)相机、彩色相机
7
)按照相机功能:二维相机、三维相机
1.1.2 相机主要参数
1.
分辨率:相机能够捕捉到的细节,用像素(相机成像的最小单元)来衡量。
一般
W*N
的形式来表示,
W
为图像水平方向每一行的像素数,
N
为垂直方向每
一列的像素数。
2.
像素尺寸:每个像素的实际大小,单位为
1mm
。在分辨率一样的情况下,
像素尺寸越小,得到的图像越大。
3.
帧率:是指相机每秒采集图像的能力,单位
FPS
(帧
/
秒)。
当被测物体有速度(运动拍摄、多数量拍摄时)要求时,要选择帧数较多的
工业相机,一般来说分辨率越高,帧数越低。
4.
接口:相机的接口是用来输出相机数据的,有
GigE
、
USB2.0/3.0
等。
1.2 如何选择相机
根据检测要求精度和视野大小,反推出相机的像素精度。计算出满足要求的
相机分辨率:
相机单边分辨率
=
视野单边
/
精度
例如:已知条件:
1.
被测物体大小
10mmx7mm; 2.
检测精度:
0.01mm; 3.
视野
范围:
12mmx9mm
相机最小分辨率
=
(
12/0.01
)
*
(
9/0.01
)
= 1200*900≈108
万像素
因此可以选用
130
万像素相机(
1280*960
);为减小边缘提取时的像素偏移
带来的误差,提高系统的精确度和稳定性,实际使用中一般用
2-3
个像素对应一
个最小的缺陷和特征,那么相机分辨率等于
108*3≈324
万。
最终选型:
320
万像素相机(
2048*1536
)
.
第二章 镜头
2.1 理论基础
2.1.1 镜头分类(三类)
1
)定焦镜头:定焦镜头按等效焦距(
=
实际焦距×
43mm/
镜头成像圆的直径) 可分为:鱼眼镜头、超广角镜头、广角镜头、标准镜头、长焦镜头、超长焦镜头
2
)变焦镜头
3
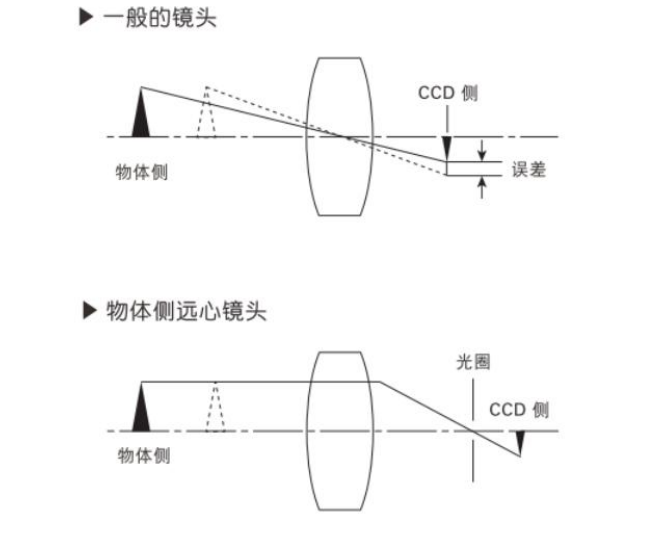
)特殊镜头:微距镜头、显微镜头、远心镜头
、红外线镜头、紫外线镜头

上述所说的远心镜头纠正了传统镜头的误差,可以在一定的距离内,使所成的像的尺寸不会因为距离的变化而改变。简单讲就是不会因为工作距离的远近而 在投影端产生大小变化的镜头。
2.1.2 镜头主要参数
1.
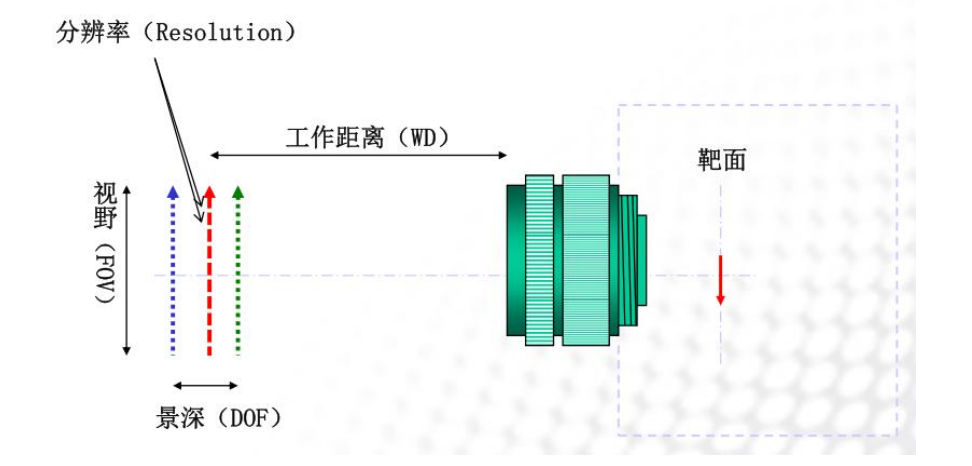
视野(
FOV
):或者叫视场角,图像采集设备所能够覆盖的范围。拍摄对象和镜头的工作距离越长,则视野越广。
2.
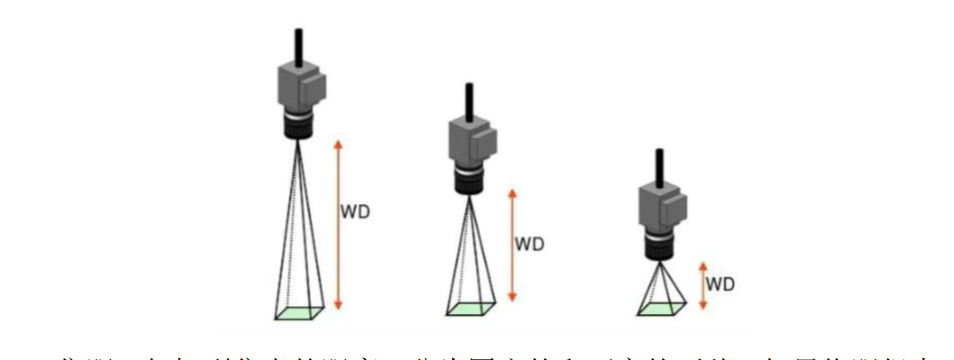
工作距离(
WD
):也称为物距,一般指镜头前端到被测物体的距离,小于最小工作距离系统一般不能清晰成像。
3.
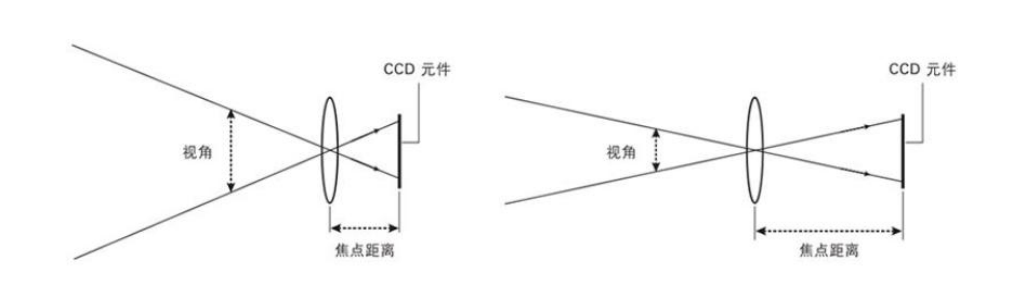
焦距:相机到焦点的距离。分为固定的和可变的两种,如果物距很大,选择焦距比较长的镜头,这样拍的清晰,但是视野范围会变小。
4.
景深:以镜头最佳聚焦时的
WD
为中心,前后存在一个范围,在此范围内镜头都可以清晰成像。简单理解就是物体放置固定高度,相机上下移动清晰成像距离区间。
5.
相对孔径:是指该镜头的入射光孔直径(用
D
表示)与焦距(用
f
表示)之比,即 D/f
6.
最大相对孔径:它往往标示在镜头上,如
1:1.2
或
f/1.2
7.
光圈系数(
F
):相对孔径的倒数称为光圈系数,用F表示。
F
值越小,光圈越大,图像越亮,景深越小,分辨率越高
8.
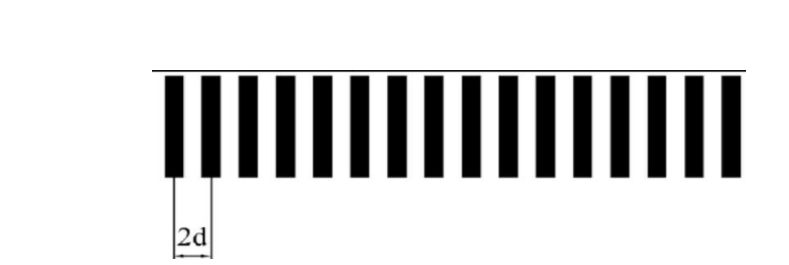
分辨率:指在像面处镜头在单位毫米内能够分辨的黑白相间的条纹对数。分辨率应该不小于相机的分辨率。分辨率越高,成像越清晰。分辨率为
1/2d
,
d
为线宽。单位是”线对
/
毫(
lp/mm
)
9.
放大倍率:检测对象的实际大小与芯片成像大小的比率。
CCD
有效像素大小÷视野=
倍率。当两者相等时,倍率等于
1
;当视野小于
CCD
有效像素大小时,代表放大多少倍。光学放大倍率 =
相机芯片长度
/
视野长边
=
焦距
f /
工作距离
WD
10.
接口:镜头与相机的机械连接方式。镜头的接口应与相机的物理接口相匹配。分为 C
口、
F
口、
CS
等接口。
11.
最大靶面尺寸(芯片尺寸):镜头使用的芯片尺寸应与相机的传感器靶面尺寸相匹配,简单才说,就是镜头投射的图像面积应不小于相机的芯片尺寸,这样通过镜头捕捉到的图像就能够刚好覆盖相机传感器的区域。
12.
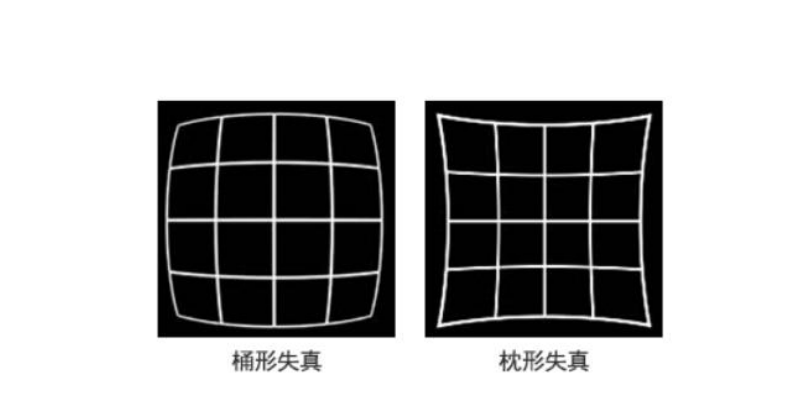
畸变:被摄物平面内的主轴外直线,经光学系统成像后变为曲线,则此光学系统的成像误差称为畸变,分为桶形畸变和枕形畸变。短焦距镜头一般表现为桶形失真,长焦距镜头一般表现为枕形失真。
2.2 如何选择镜头
2.2.1 步骤
1
)确定相机连接镜头的接口类型。
C
口
/F
口等。
2
)确定镜头的最大靶面尺寸与相机相匹配。
3
)确定焦距。首先,确定测量工作距离和目标物体的大小,得到图像的宽或高;确定相机的安装位置,从相机的拍摄角度推测视角,最后根据二者的几何关系计算相机的焦距。
2.2.2 网址直接选型
1
)网址
1
第一步:在
https://www.coolens.cn/support.html
网址中,输入相机类型。

第二步:输入视野边长和工作距离。网址会输入内容得到所需的镜头。
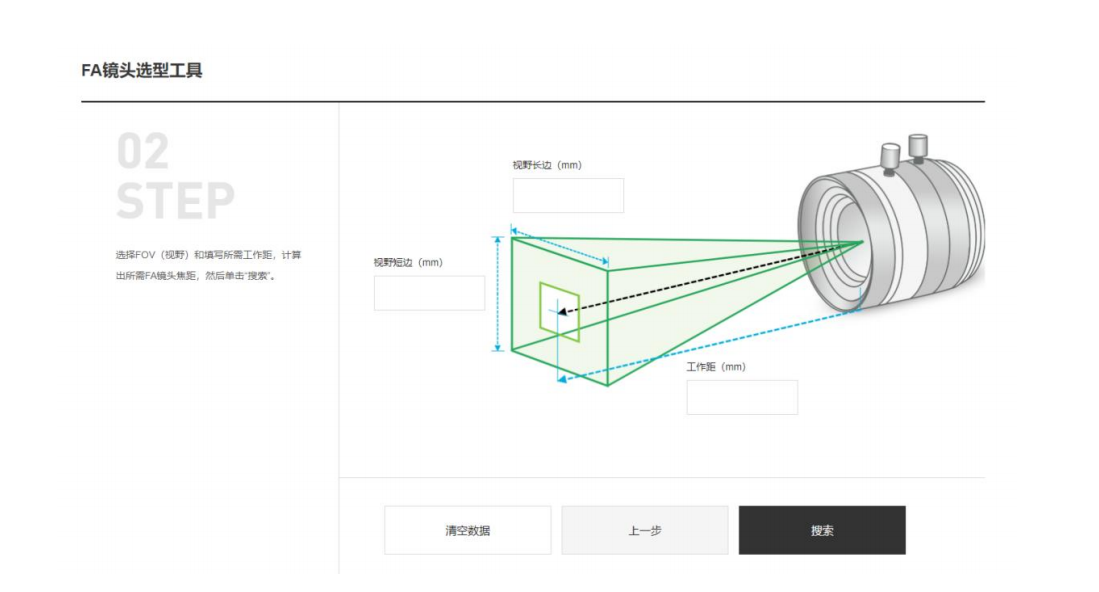
2
)网址
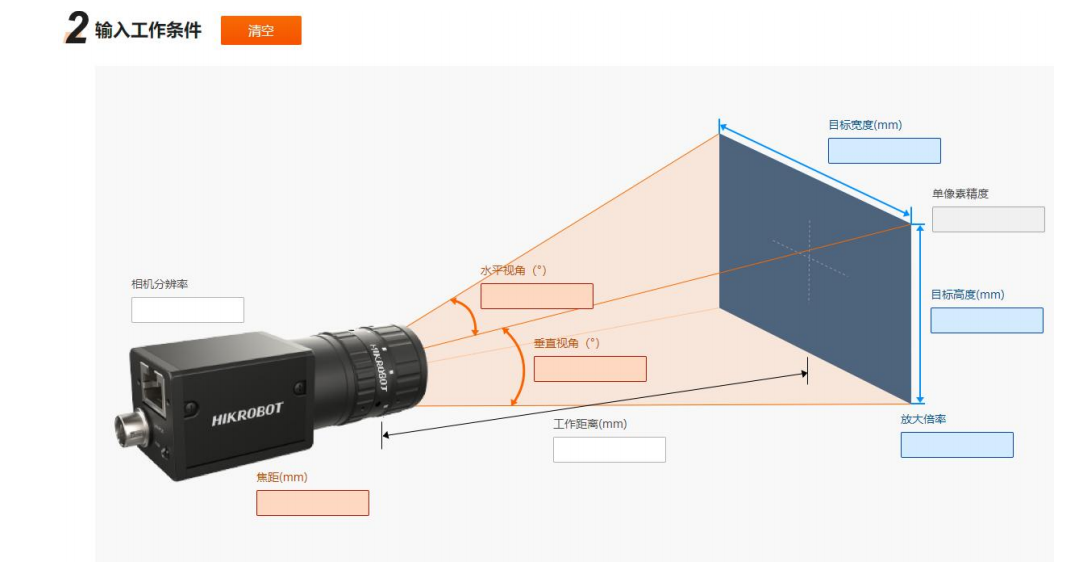
2
第一步:通过下面的网址输入对应的相机型号和相机系列。
https://www.hikrobotics.com/cn/machinevision/visionproduct?typeId=40&id=24
7&pageNumber=1&pageSize=20&showEol=false

第二步:输入工作条件,则可以得到结果。
第三章 案例分析
工业相机镜头焦距、工作距离、视野等选型的计算
:
https://blog.csdn.net/weixin_45303602/article/details/141068422
3.1 计算相机分辨率
根据系统对图像精度的要求来选择相机的分辨率
已知条件:
1.
被测物体大小
10mmx7mm; 2.
检测精度:
0.01mm; 3.
视野范围:
12mmx9mm
计算过程:
相机最小分辨率
=
(
12/0.01
)
*
(
9/0.01
)
= 1200*900
≈
108
万像素
因此可以选用
130
万像素相机(
1280*960
);为减小边缘提取时的像素偏移带来的误差,提高系统的精确度和稳定性,实际使用中一般用 2-3
个像素对应个最小的缺陷和特征,那么相机分辨率等于 108*3
≈
324
万。
最终选型:
320
万像素相机(
2048*1536
)
.
3.2 计算镜头焦距
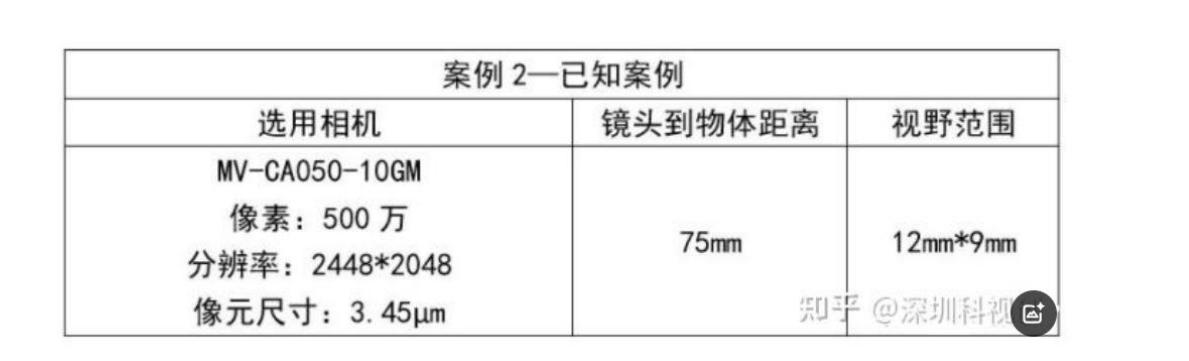
计算过程:
1
)
Sensor
长宽尺寸
= (Sensor
长度或高度
*
像元尺寸
)/1000
可计算出:
Sensor
长度
= 2448*3.45/1000 = 8.4456mm
Sensor
高度
= 2048*3.45/1000 = 7.0656mm
2
)光学放大倍率(β)
= (Sensor
长度(
h
)
)/(
视野长度(
H
)
)=8.4456/12
≈
0.7038
3
)焦距(
f
)
=
物距(
D
)
*
光学放大倍率(β)
= 75*0.7038 =52.785mm
,
因此可以选择
50mm
焦距镜头
4
)实际光学放大倍率
=
焦距(
f
)
/
物距(
D
)
=50/75
≈
0.667
视野长度
= (Sensor
长度(
h
)
)/
实际光学放大倍率
= 8.4456/0.667
≈
12.662mm
视野高度
= (Sensor
高度(
v
)
)/
实际光学放大倍率
=7.0656/0.667
≈
10.593mm
5
)单像素精度
= (
视野长度(
H
)
)/Sensor
长方向有效像素个数
=12.662/2448
≈
0.0052mm
6
)结论:选用
50mm
镜头,搭配
500
万像素相机,可以达到
12.662mm x
10.593mm
的视野,单像素精度
5.2µm
3.3 计算相机视野范围和镜头视场角
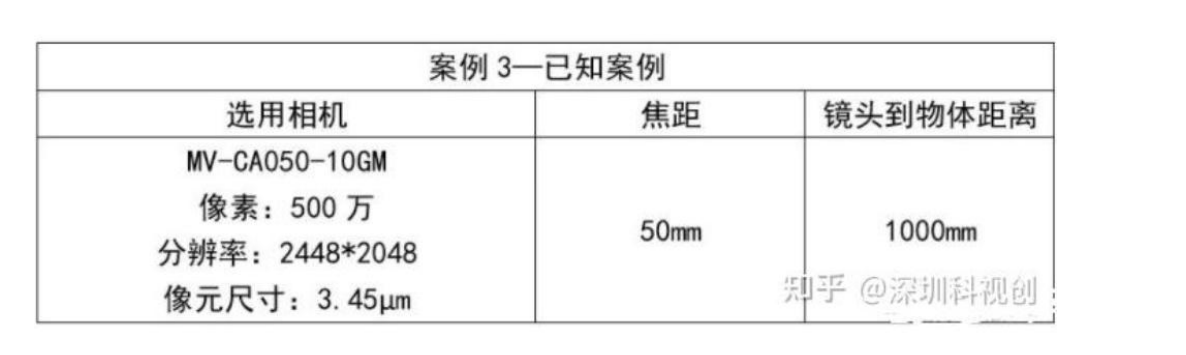
计算过程:
1
)
Sensor
长度高度:
h = 2448 * 3.45µm =8.4456mm, v = 2048 *3.45µm = 7.0656mm
2
)利用
(Sensor
长度(
h
)或高度(
v
)
)/
视野范围
FOV=
焦距
f/(
物距
D) 可计算出相机视野范围是:X = 8.4456 * 1000/50 = 168.91mm, Y = 7.0656 * 1000/50 =141.31 mm
3
)计算相机视场角:
2
θ
= 2 * arctan(h
或
v/2/f) 2θ
x = 2 *arctan(8.4456/2/50) =10
°
, 2
θ
y = 2 * arctan(7.0656/2/50) = 8
°
工作距离较近时,计算结果与实测结果会有一定的差异,计算数据仅供参考, 需要以实测为主。

















 1070
1070

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









