






总之就是看1.你设置的循环频率是不是太小了;
2.atan2()函数的参数是不是传反了
(错的轨迹太离谱,海龟跟疯了一样,用这篇文章记录下哈哈哈,又是粗心惹的祸)
情况1:turtle2能跟到turtle1,但是不是一道平滑的曲线,跟随过程中在转圈圈。
错因:设置的循环频率Rate太小--->改成10就可以了。
rospy.Rate(1) ---> rospy.Rate(10)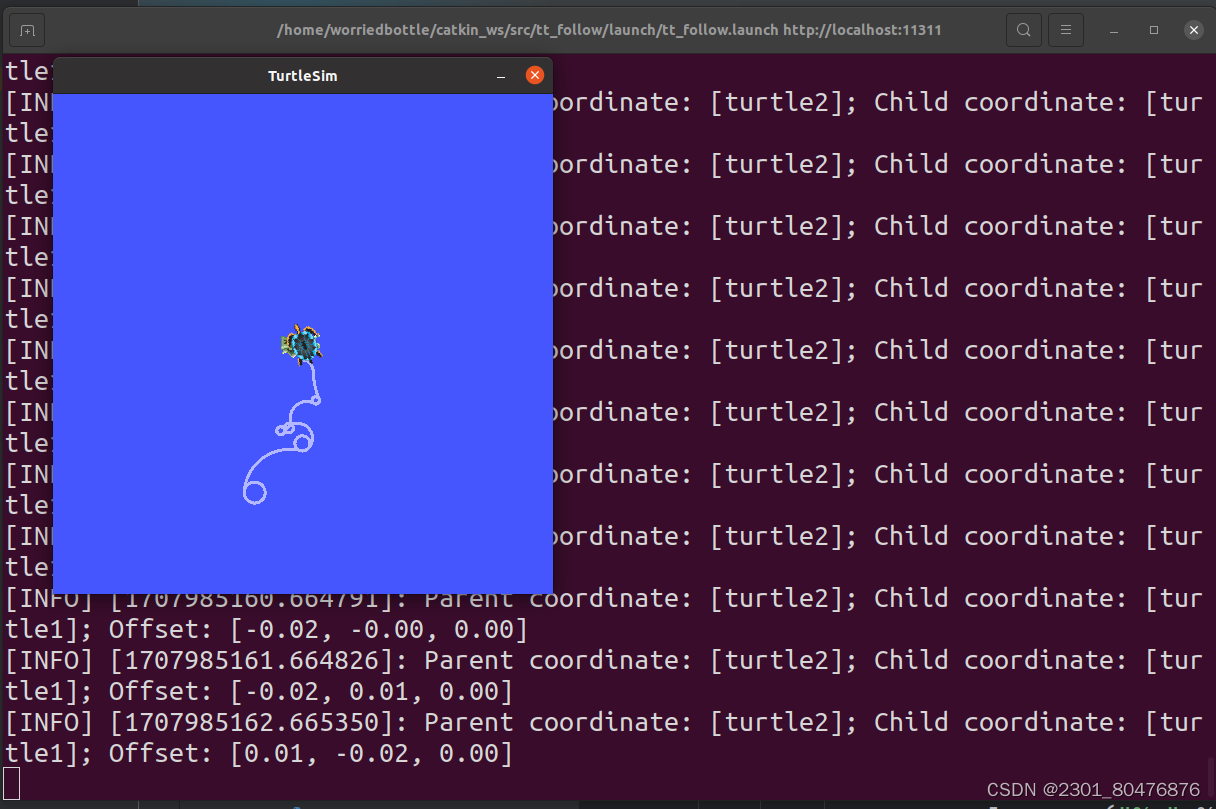
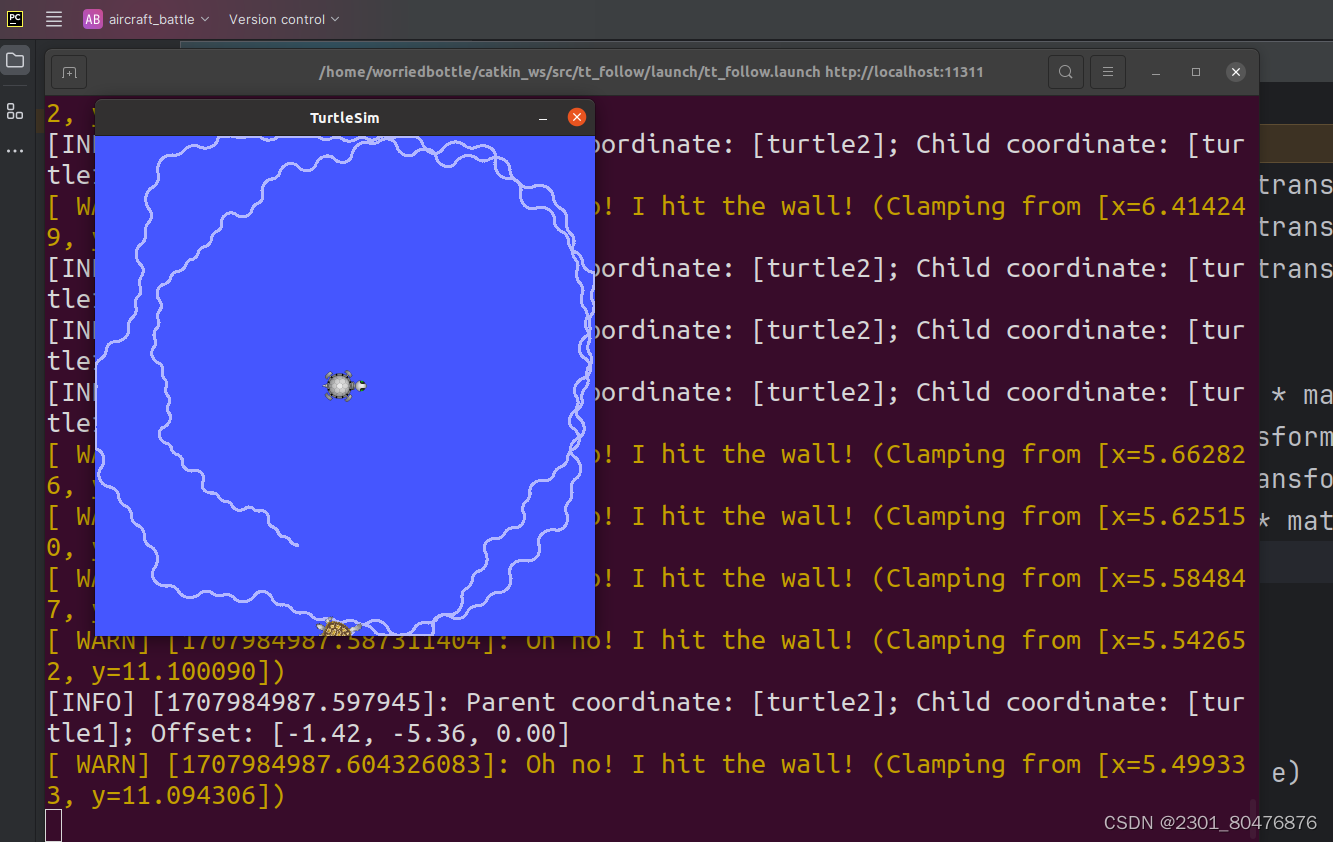
情况2:turtle2不能跟随到turtle1,同时还转圈圈。
错因:设置的Rate太小--->改成10;
rospy.Rate(1) ---> rospy.Rate(10)同时,计算角速度的时候参数传反了(atan2(y, x)函数:前一个参数是y,后一个参数是x)--->把参数位置换一下就可以了。
ts = buffer.lookup_transform("turtle2", "turtle1", rospy.Time(0))
# twist = Twist()
# twist.angular.z = 4 * math.atan2(ts.transform.translation.x, ts.transform.translation.y)
# 改成下面
twist = Twist()
twist.angular.z = 4 * math.atan2(ts.transform.translation.y, ts.transform.translation.x)

情况3:turtle2不能跟随到turtle1,乱跑
错因:计算角速度的时候参数传反了(atan2(y, x)函数:前一个参数是y,后一个参数是x)--->把参数位置换一下就可以了。
ts = buffer.lookup_transform("turtle2", "turtle1", rospy.Time(0))
# twist = Twist()
# twist.angular.z = 4 * math.atan2(ts.transform.translation.x, ts.transform.translation.y)
# 改成下面
twist = Twist()
twist.angular.z = 4 * math.atan2(ts.transform.translation.y, ts.transform.translation.x)
运行正常的轨迹
















 1592
1592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









