






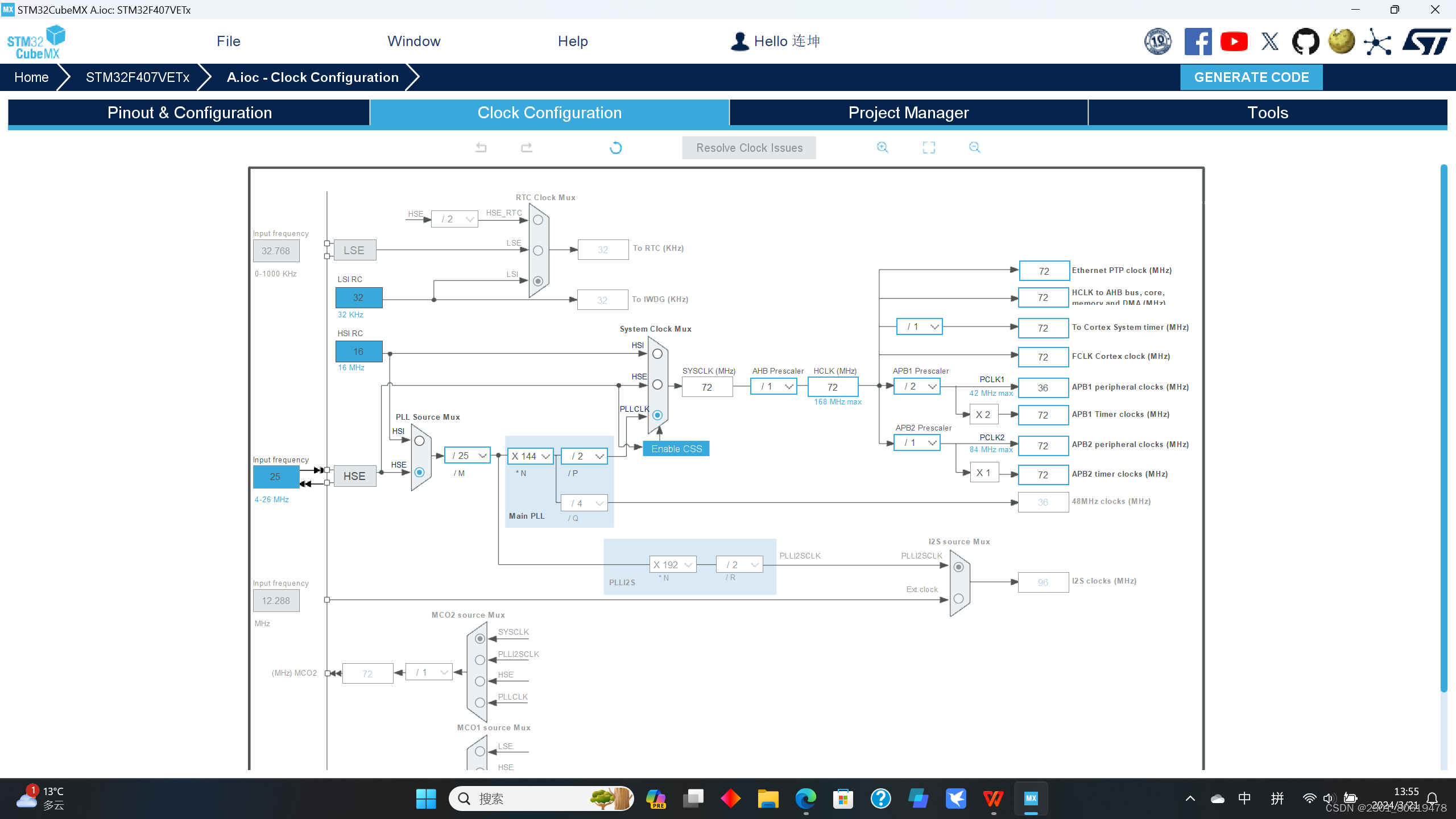
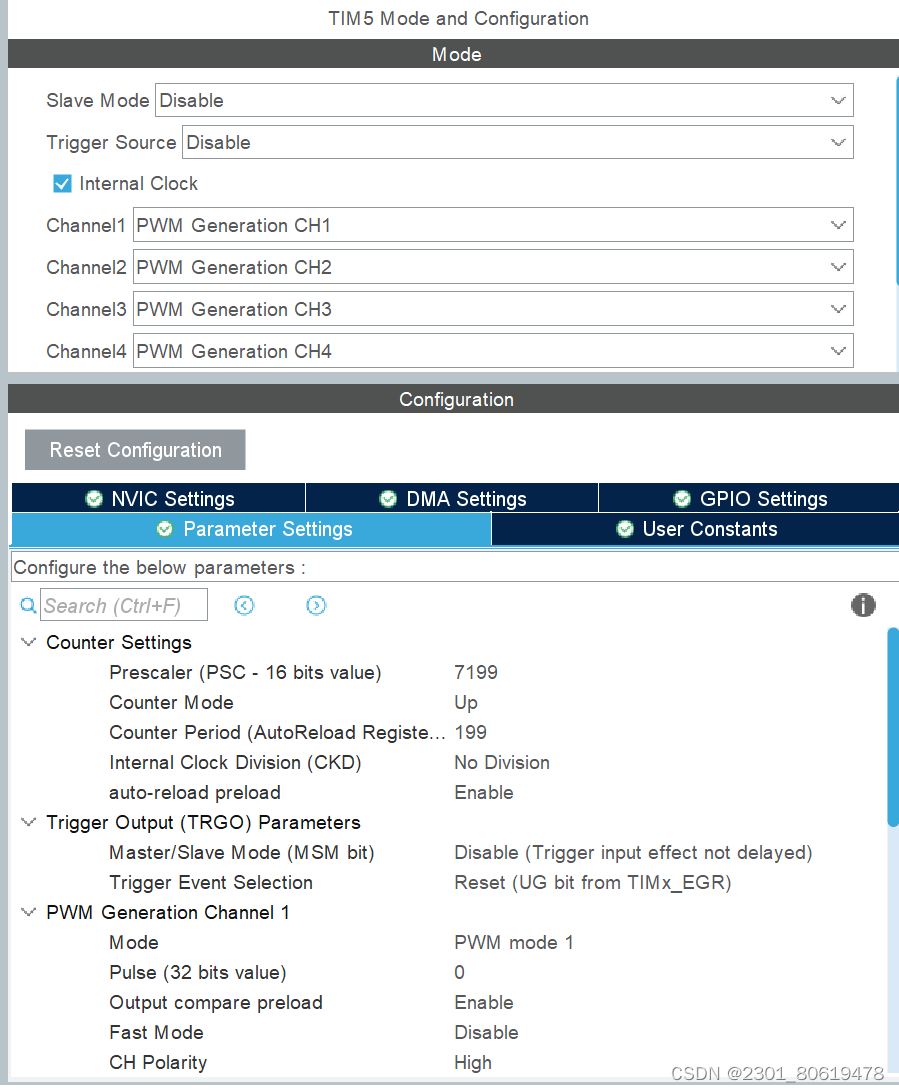
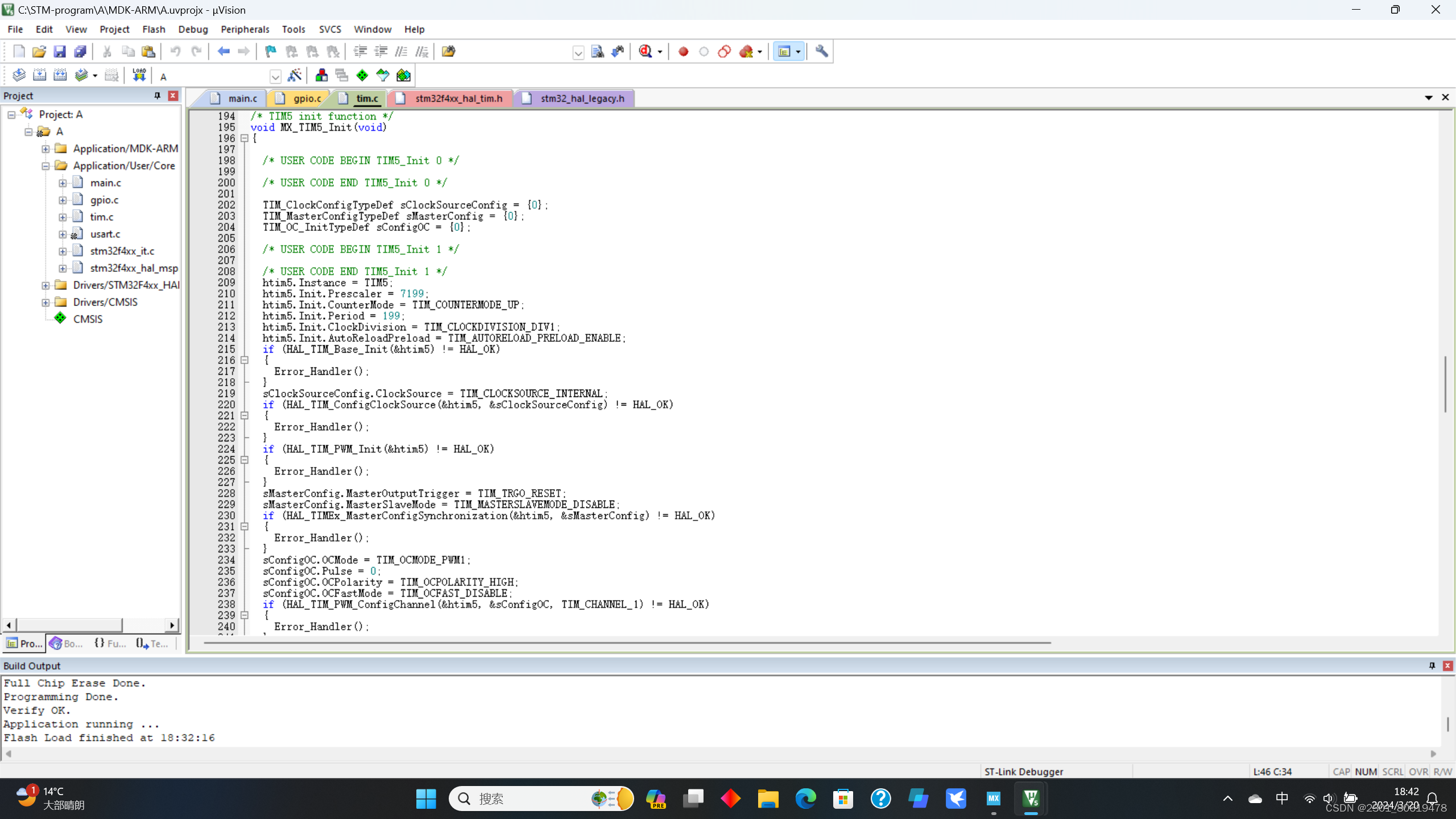
我用STM32F407VET6开发板做项目的时候,使用TIM5输出四路PWM驱动四路舵机,PSC=7199,ARR=199,时钟频率为72MHz,我用图中的语句初始化舵机,
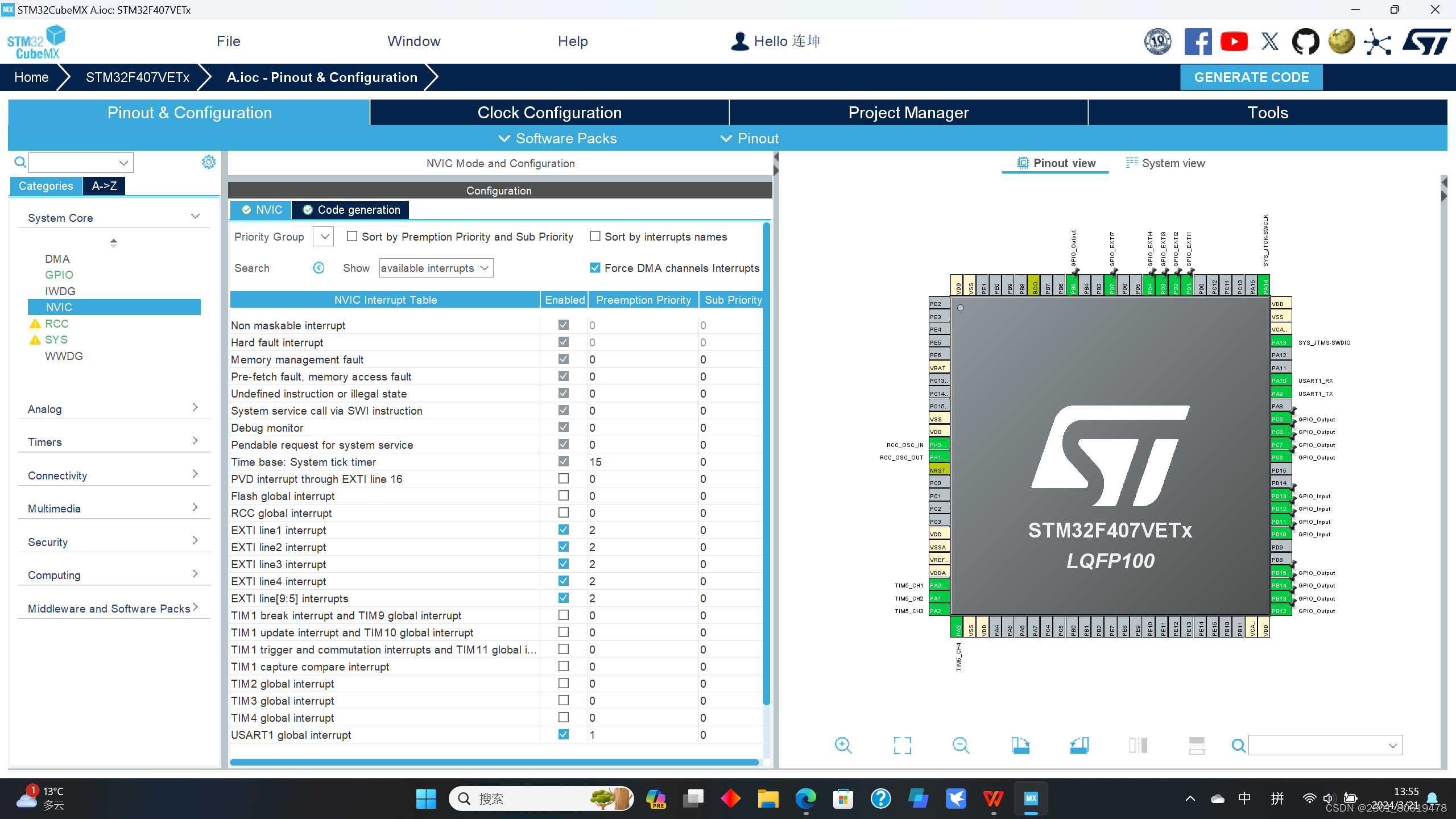
下图是我CubeMX上关于NVIC,GPIO,时钟树以及TIM5参数的设置,用来输出PWM的时钟为TIM5
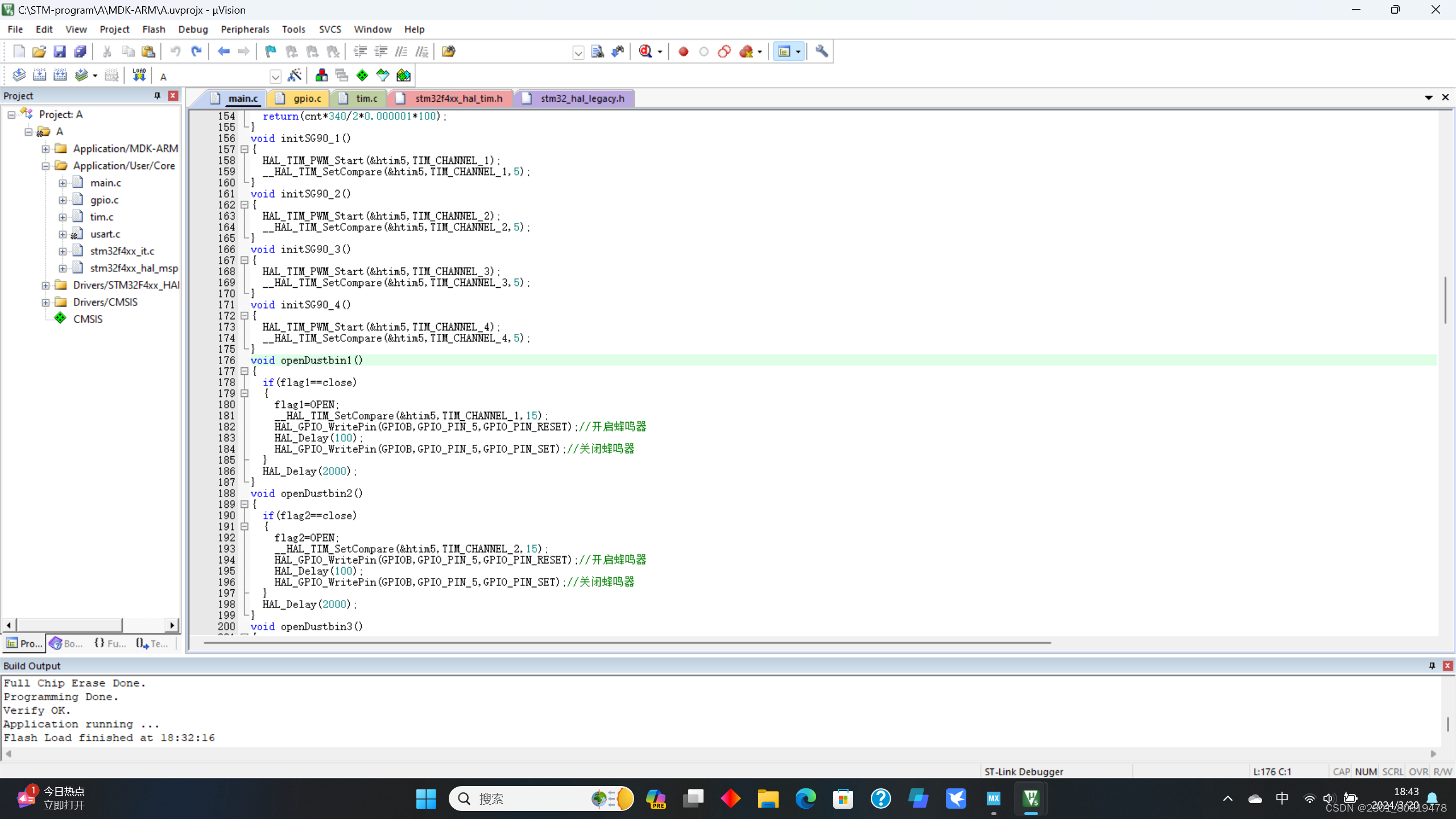
下图是我的部分代码
理论上应该转到0度,可是复位之后发现舵机一直卡在90度不动
还有一个问题就是,我的蜂鸣器接在PB5引脚,蜂鸣器为低电平触发,PB5引脚我设置的是输出高电平,但是复位后蜂鸣器会一直响
TIM1-TIM4我用来驱动四路超声波测距模块,但是我发现这四个时钟好像和TIM5有某种关系,如果我把while循环的key_control()函数放在get_distance()之前,上电复位后就能正常工作了;但是如果把它放在if语句之前,上电后复位好几次才能正常工作
整个过程按键完全无效
这个问题困扰我好多天了,我实在想不到哪里出现了问题,恳请大佬帮我解答一下,如果能解决问题的话可以有偿,这个对我来说真的很重要















 1064
1064











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









