






基于STM32F4核心板的经典项目程序,远比网上搜索的开发板例程更有价值,历时2年时间打造。
适合学生学习,工程师提高技术等等。
项目内容为:用stm32f407单片机核心板和gy-91模块做一个功能强大的四旋翼无人机飞控,程序从零开始做起,简洁而不简单。
里面主要包括pid控制器,无迹卡尔曼滤波UKF,IMU+GPS组合导航,上位机通信,遥控器通信和解码,dma传输,手机蓝牙控制等。
实现无人机垂直起降,定点,轨迹控制等。
商品包括原理图方案,单片机程序及固件,上位机程序及运行环境。
ID:69100675374361760
yuchongzhangyuan



基于STM32F4核心板的经典项目程序——四旋翼无人机飞控系统
摘要:本文介绍了一种基于STM32F4核心板和gy-91模块的四旋翼无人机飞控系统,该系统具有强大的功能和稳定的性能。文章详细介绍了系统的设计原理和实现方法,包括PID控制器、无迹卡尔曼滤波UKF、IMU+GPS组合导航、上位机通信、遥控器通信和解码、DMA传输以及手机蓝牙控制等关键技术。通过该系统,无人机可以实现垂直起降、定点飞行和轨迹控制等功能。本文旨在为学生学习和工程师提高技术水平提供参考。
一、引言
随着无人机技术的飞速发展,四旋翼无人机已经逐渐成为人们研究和实践的热点。作为无人机的核心部件,飞控系统对无人机的飞行性能和稳定性起着决定性的作用。本文介绍的基于STM32F4核心板的经典项目程序,是一款针对四旋翼无人机的飞控系统,通过精心的设计和优化,使得无人机具备了强大的功能和稳定的飞行性能。
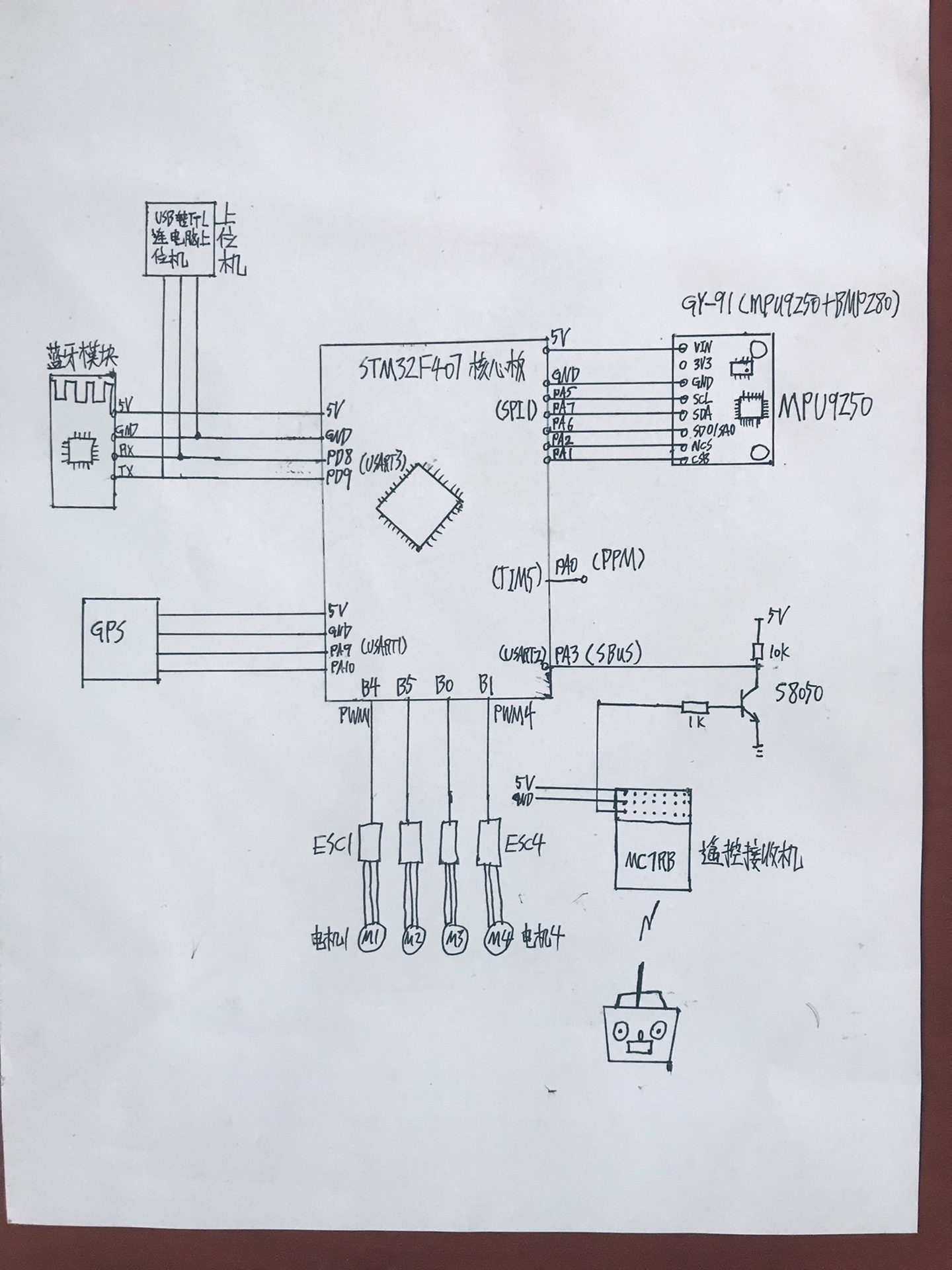
二、系统概述
本项目使用STM32F4核心板和gy-91模块作为硬件平台,搭建起一套完整的四旋翼无人机飞控系统。该系统主要包括PID控制器、无迹卡尔曼滤波UKF、IMU+GPS组合导航、上位机通信、遥控器通信和解码、DMA传输以及手机蓝牙控制等模块。下面将对各个模块进行详细介绍。
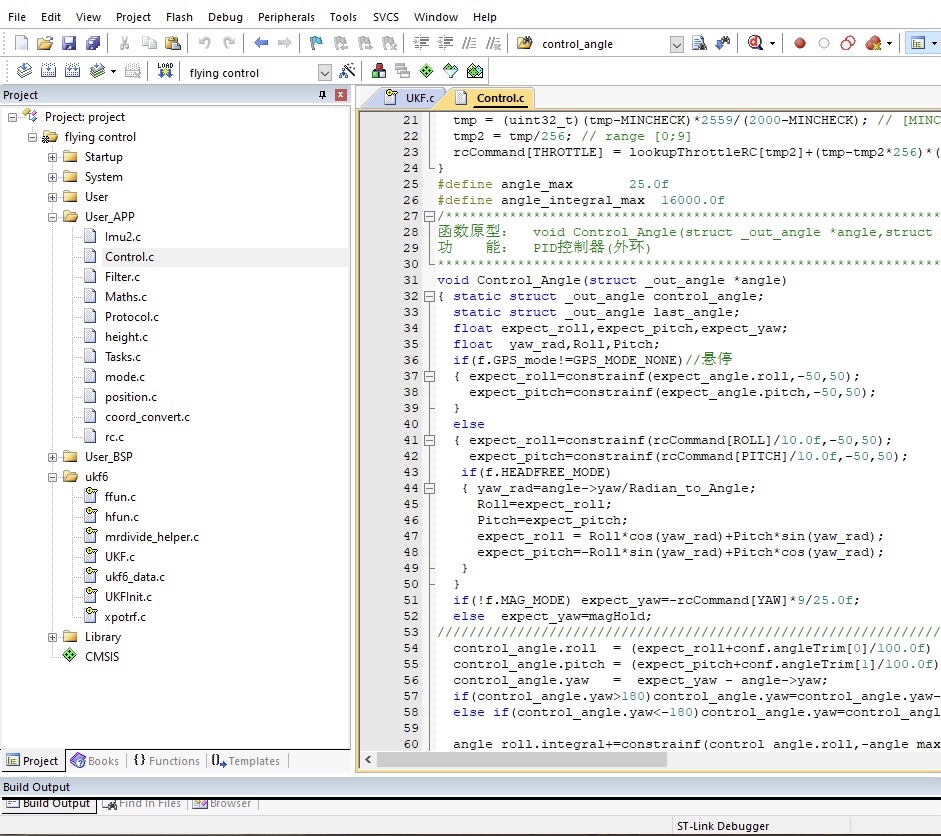
三、PID控制器
PID控制器是无人机飞行控制的核心部件之一,通过对无人机姿态、位置等数据进行调节,实现对无人机的精确控制。本项目中采用了经典的PID控制算法,并根据实际需求进行了优化和调整,使得无人机在飞行过程中能够稳定、精确地响应控制指令。
四、无迹卡尔曼滤波UKF
为了提高无人机的姿态和位置测量的精度,本项目引入了无迹卡尔曼滤波UKF算法。UKF算法通过考虑系统非线性以及测量噪声的影响,能够更准确地估计无人机的状态变量,从而提高飞行控制的稳定性和精度。
五、IMU+GPS组合导航
惯性测量单元(IMU)和全球定位系统(GPS)是无人机导航和定位的核心组件。本项目中将IMU和GPS数据进行融合,实现了一种高精度的组合导航算法。通过IMU的姿态信息和GPS的位置信息,无人机可以实现更准确的飞行控制和定位功能。
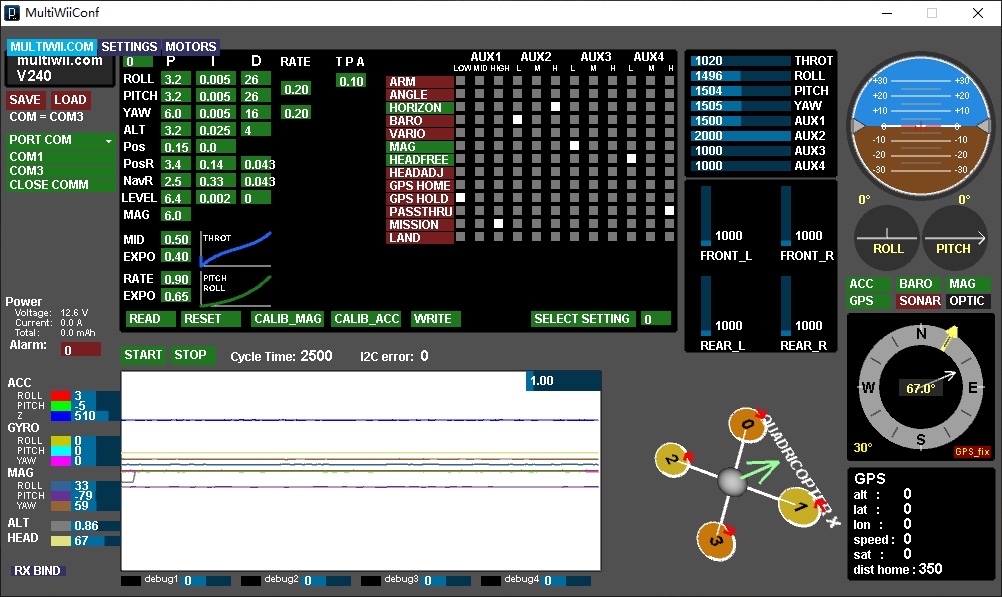
六、上位机通信
为了实现对无人机的实时监控和控制,本项目设计了一套上位机通信协议。通过串口通信,将无人机的姿态、位置和控制指令等数据传输到上位机,实现无人机的实时监控和远程控制。
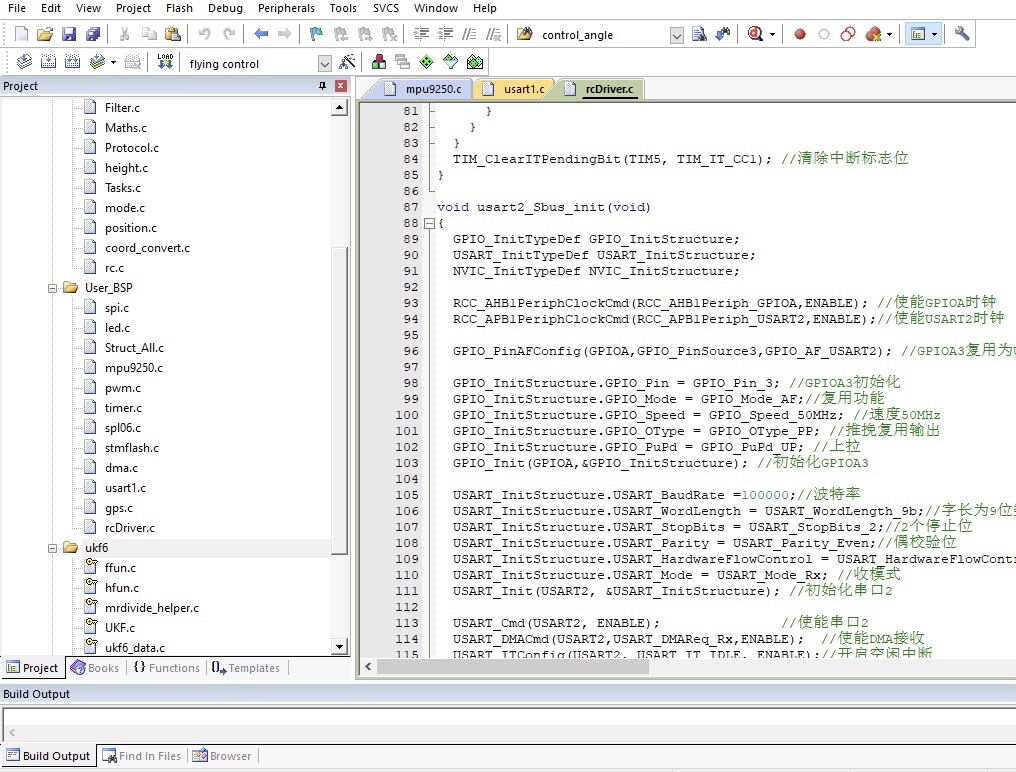
七、遥控器通信和解码
为了实现对无人机的手动控制,本项目使用了遥控器通信和解码模块。通过接收来自遥控器的控制信号,将其解码为控制指令,并传输给飞控系统,实现对无人机的手动控制和操控。
八、DMA传输
为了提高数据传输的效率和稳定性,本项目采用了DMA传输技术。通过DMA传输,可以实现无人机的高速数据传输和处理,提高系统的性能和响应速度。
九、手机蓝牙控制
为了使得无人机的操控更加灵活和便捷,本项目支持通过手机蓝牙进行远程控制。通过与手机应用的配合,可以实现无人机的无线操控和飞行控制。
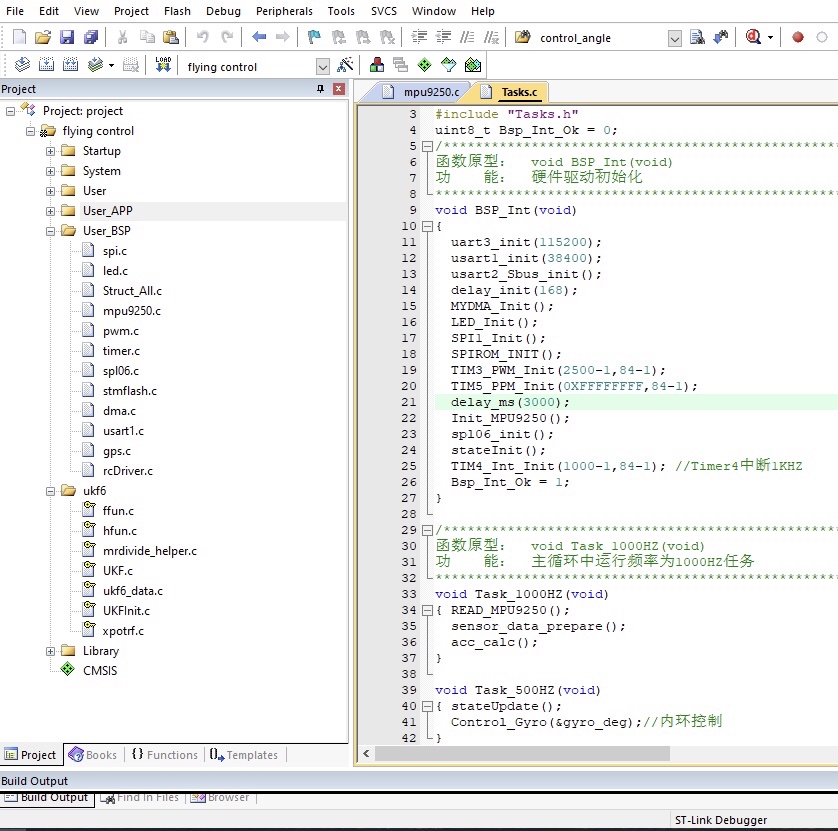
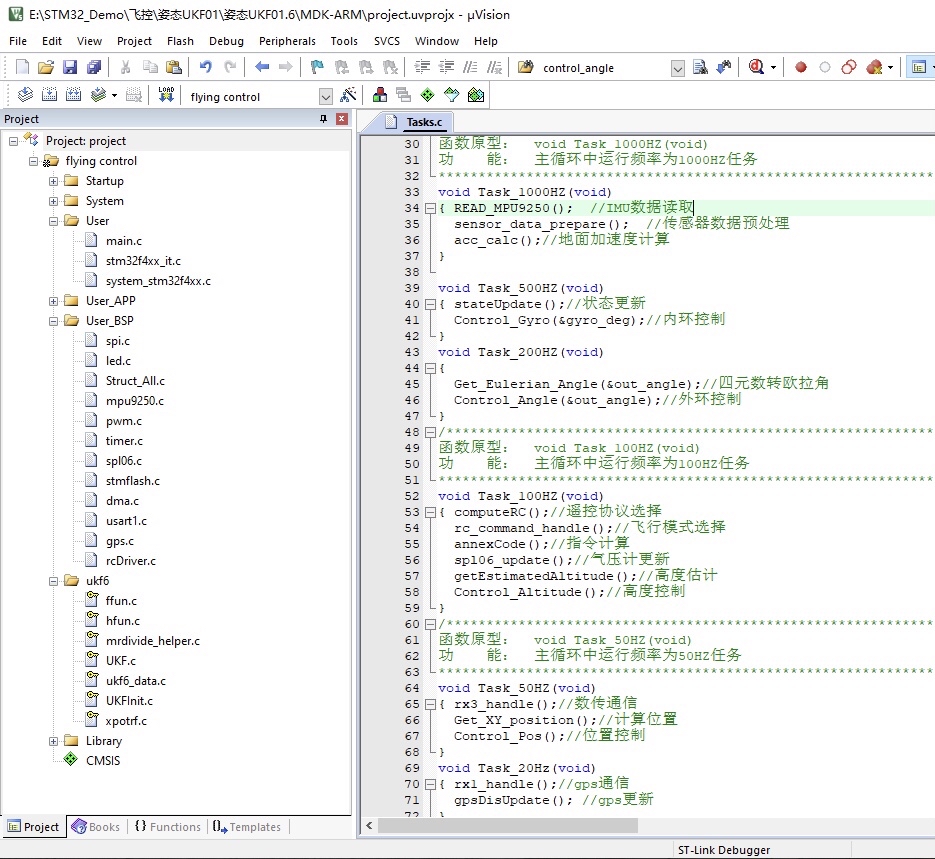
十、系统实现
本项目通过对硬件平台的选型和系统设计的优化,实现了一款功能强大、稳定性高的四旋翼无人机飞控系统。系统提供了完整的原理图方案、单片机程序和固件、上位机程序及运行环境等,方便学生学习和工程师进行技术提升。
结论
本文介绍了一种基于STM32F4核心板的经典项目程序,通过该程序可以实现一款功能强大、稳定性高的四旋翼无人机飞控系统。该系统通过PID控制器、无迹卡尔曼滤波UKF、IMU+GPS组合导航、上位机通信、遥控器通信和解
以上相关代码,程序地址:http://coupd.cn/675374361760.html


















 1198
1198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









