






移动机器人在科学研究和工程应用中承担着重要角色。随着技术进步和工业发展,各色各样的机器人走进了人们的生产生活。面对高新技术研发,一方面企业求才若渴,另一方面很多学生、工程师却苦于无法系统、深入地学习机器人方面的知识。网络上繁杂的文字容易让人陷入迷惘和混乱,很多人因此从入门走到了”放弃”。

针对这种情况,本工坊对当前移动机器人应用最广泛的技术方向之一的SLAM推出了从入门到仿真再到实战的系统化学习课程,帮助有意成为机器人工程师的朋友学好和用好SLAM(2D)技术打下扎实的基础。
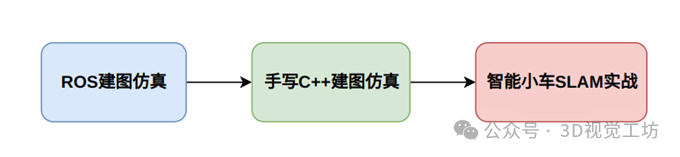
对于slam的入门学习,首先,我们会在ROS系统基础上带领学员快速、完整地搭建一个移动机器人仿真系统,让大家认识到机器人完成最基本的移动工作需要哪些SLAM核心模块。其次,课程老师会带领学员用C++手写一个机器人SLAM仿真系统,让大家学会SLAM核心模块的核心算法。最后,课程还有配套的实体机器人小车供大家进一步实战学习。

课程亮点
本门课程从理论和实践两方面带领新手入门2d激光slam。理论方面涵盖了基础的、核心的slam模块算法,ROS框架结构知识。课程不但对其原理进行深入分析和讲解,每个算法和重要框架模块均有对应的实战代码,讲师将带领学员逐步实现2d激光雷达仿真,扫描仿真和运动仿真等等,算法模块最终可以组合为一个完备的纯C++ 手写slam简易仿真,学员完成该仿真工程后,可以高屋建瓴地看待整个slam算法。实践方面,本课程除了提供ROS slam仿真工程外,还有配套小车套件供学员选择,真正地从理论到实践打开slam的大门。
课程代码实战结果展示
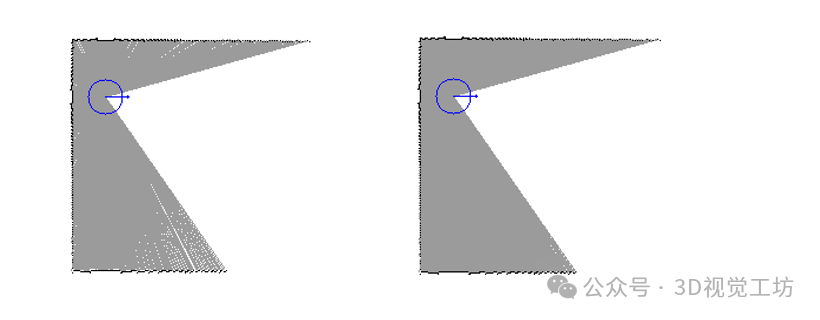
C++手写slam仿真:
1.2d激光雷达扫描仿真与栅格地图美化:
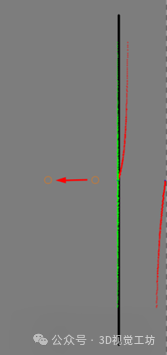
2.运动畸变去除仿真(红色为存在运动畸变的点云,绿色为畸变校正后点云)
运动方向水平从右向左
3.机器人运动仿真
4.添加运动噪声的建图效果, scan2scan建图, scan2map建图:
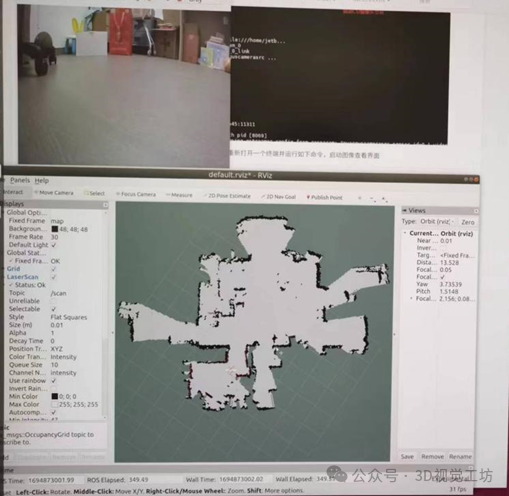
ROS slam仿真:
,时长00:17
实体小车遥控建图:
小车实物图

ROS-SLAM两轮差速小车NanoBot A001
小车介绍
| NanoBot A001主要硬件介绍 | |
|---|---|
| 主控制器 | jetsonNano 4G版本 |
| 微控制器 | 树莓派主控 |
| 激光雷达 | 思岚A1 |
| 相机 | 160度镜头(CSI接口) |
| 音频 | 支持麦克风和喇叭 |
| 电机 | 高性能直流电机+高精度编码器 |
| 无线网络 | 双模无线网卡(双频wifi+蓝牙) |
| 其他配置 | 电池电压检测、1寸OLED显示屏等 |
NanoBot除了具备课程需求的遥控建图功能外,得益于强大的硬件配置,NanoBot还支持非常丰富的扩展功能,比如多样的SLAM建图和导航功能、避障功能、路径规划等。基于摄像头,NanoBot可以进一步开发物体检测、语义SLAM地图、智能避障、单目测距等自动驾驶功能。购买一台NanoBot即可支持学习大部分移动机器人工作实践中需要使用的功能。此外,我们还为学员免费赠送语音模块,让NanoBot的“技能”更加丰富。
学后收获
1.入门slam领域,尤其是2d激光slam
2.夯实算法基础,完成c++建图仿真
3.ROS仿真建图到实体小车建图,理论到实践
4.了解行业发展和职场前景
还能收获
优质的学习圈子:伙伴们大多是来自985、211及海外院校硕博,在这里大家一起学习、进行讨论与研究。独一无二的优质圈子将是你未来学习与就业的宝贵资源。
课程服务
讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。
备注:小车实战部分内容仅针对购买硬件的学员。
开课时间
2024年6月15日晚上8点(周六),每周更新一章节。
课程答疑
本课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。

▲长按购买课程,前50名 享早鸟价,立减100元

▲长按添加小助理微信 cv3d007,咨询更多















 2292
2292











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









