






控制定位的要点
1.位置的移动速度(电机的转速)
2.位置的移动距离(电机转动的圈速)
3位置的移动反向(电机转动的方向)
PLSY (脉冲输出) S1 S2 D
S
1
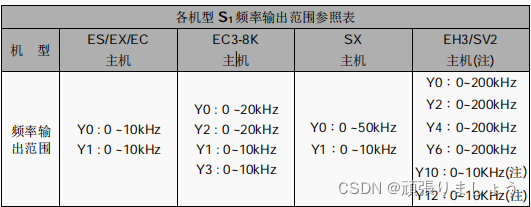
:脉冲输出频率。
S
2
:脉冲输出数目。
D
:脉冲输出装置(请使用输出模块为晶
体管输出)
其中,频率控制速度,数目控制距离,需要注意的是Y0输出,则Y1控制方向;Y1输出则Y0控制方向;总之,需指定控制方向的输出口
PLSY
指令在程序中使用时,输出不可与其它高速输出指令重复启动输出,如:
API
58 PWM
指令、
API 59 PLSR
指令
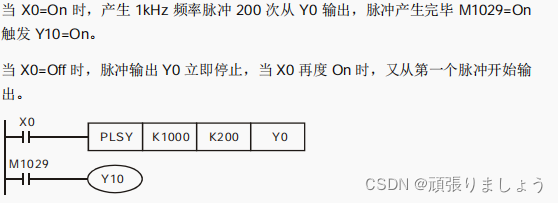
1/1000HZ=0.001秒,0.001X200=0.2秒。即Y0用0.2秒发出脉冲后Y0熄灭,M1029位ON
PWM(脉冲宽度调节) S1 S2 D
S
1
:脉冲输出宽度。
S
2
:脉冲输出周期。
D
:脉冲输出装置。(请使用输出模块
为晶体管输出)
PLSR (加减速脉冲输出) S1 S2 S3 D
S
1
:脉冲输出的最大频率值。
S
2
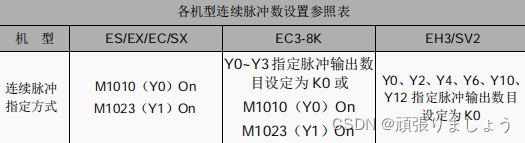
:全部脉冲输出的总脉冲数。
S
3
:加减速的时
间
(ms)
。
D
:脉冲输出装置。(请使用主机为晶体管输出的机型)
| 1. | PLSR 指令执行时,设置 S1 脉冲输出的最大频率值、S2 全部脉冲输出的总脉冲数(PLS)及 S3 加减速时间后,由 D 脉冲输出装置输出。开始以每次增加 S1 / 10 的频率开始输出脉冲。每个频率输出脉冲的时间都是固定S3 / 9。 | |
| 2. | 在每段加速时,因为每个频率乘以时间之后的脉冲数目不一定为整数,PLC 会取整数输出,因此每一个区段的时间并无法刚好都相等,会有些误差,误差值大小决定于频率的大小及相乘后舍去的小数点值大小。PLC 会将脉冲输出不足的部分都补到最后一个区段,以确保输出脉冲的个数正确 |

















 3817
3817

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









