






话不多说,先看效果
平衡循迹
本片博客主要解决平衡车的mpu,平衡,循迹,和蜂鸣器指示,其他的功能如过几次线就停,停多久等待就大家自己写吧,文末给大家一些我写的思路
注意,文中的所有代码均在文末的代码文件中,如有不理解位置的地方请参考文末代码文件,如有错误请在评论区指出
1.硬件设计(仅限参考)
先是原理图如下
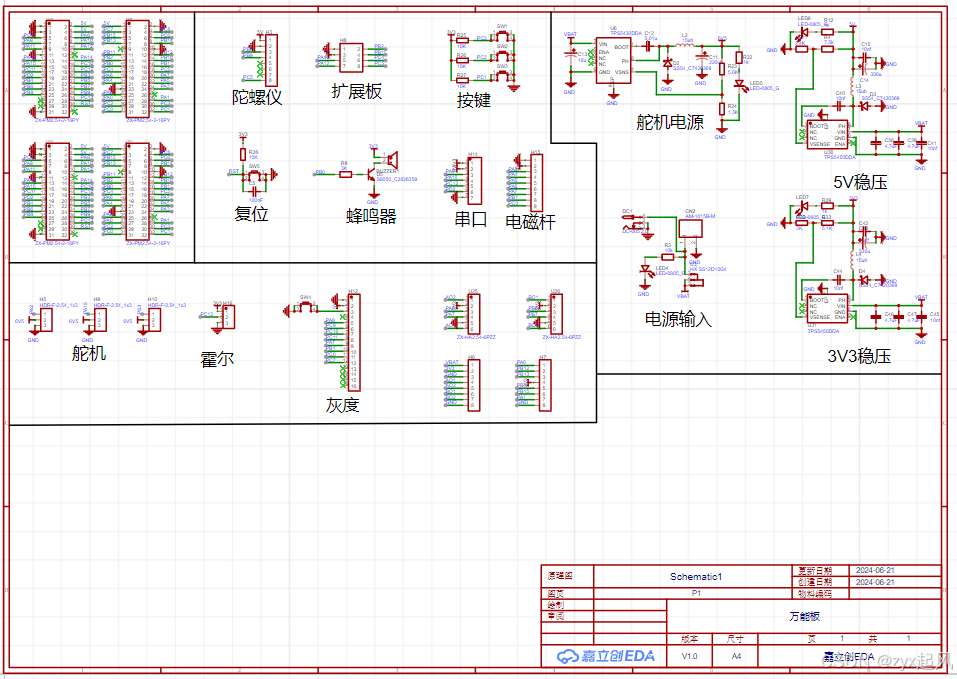
主要模块:灰度,电源,mpu(陀螺仪),oled,tb6612,含有编码器的电机
2.mpu模块的使用和移植
想要使平衡车保持平衡,mpu是最重要的模块,大家可以参考这个博主写的
如果大家没有时间或者移植失败,也可以直接移植我代码之中的mpu模块:
链接: https://pan.baidu.com/s/1-9Vstj5v0Wgqkm1AFrCt_w?pwd=k8g8 提取码: k8g8
3.代码的主要逻辑
1.通过mpu获得pitch,roll,yaw的值来进行处理 2.获得编码器的数值3.通过处理之后的数据进行电机的控制
1.读取float pitch,roll,yaw; //欧拉角 short aacx,aacy,aacz; //加速度传感器原始数据
1..首先讲解cubmax上的配置
这里重点说明一下,mpu的移植代码中应该把其中的位置配置修改为与你的硬件相匹配
对于相应的引脚设置为input就可以了
然后要设置一个定时器中断,以此来随时获得mpu的数值
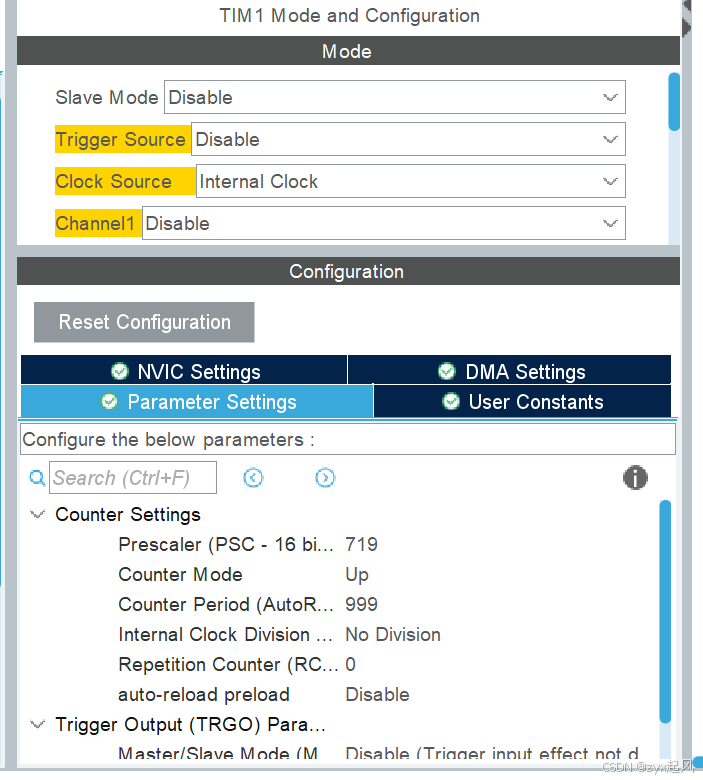
中断的代码:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM1)//每10ms进入定时器中断
{
mpu_dmp_get_data(&pitch,&roll,&yaw);//读欧拉角
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz);//读陀螺仪原始数据
// MPU_Get_Accelerometer(&aacx,&aacy,&aacz);//读取加速度
Encoderleft = getEncoderleft();
Encoderright = getEncoderright();
gray_detect();
balance();
}
}这里要特别说明一下,大家可以加一下下面这串代码,每次从当前位置获取mpu的零点,初始化成功之后在运行下面的代码,这样大家每次开始都放到同一位置就可以保持平衡了(放到main中)
while (MPU_Init ())
{
OLED_ShowString (0,0,"mpu_err",12);
OLED_Refresh ();
}
while(mpu_dmp_init())//初始化dmp,成功返回0
{
OLED_ShowString(0,16,"error",12);
OLED_Refresh();
}到这里,我们应该就可以成功获取mpu的6个值了,大家可以试着坐一坐,这是平衡车最重要的准备工作
3.编码器数值的读取和驱动讲解
通常来说,如果我们只考虑mpu的值的话,即往那边到就往哪边跑,这样平衡效果不好而且平衡时间通常很短,如果要持续保持平衡,那么我们就还需要编码器的数据,这样如果摆动过大,可以以更大的速度保持平衡,在参数调好的情况下可以在原地保持平衡
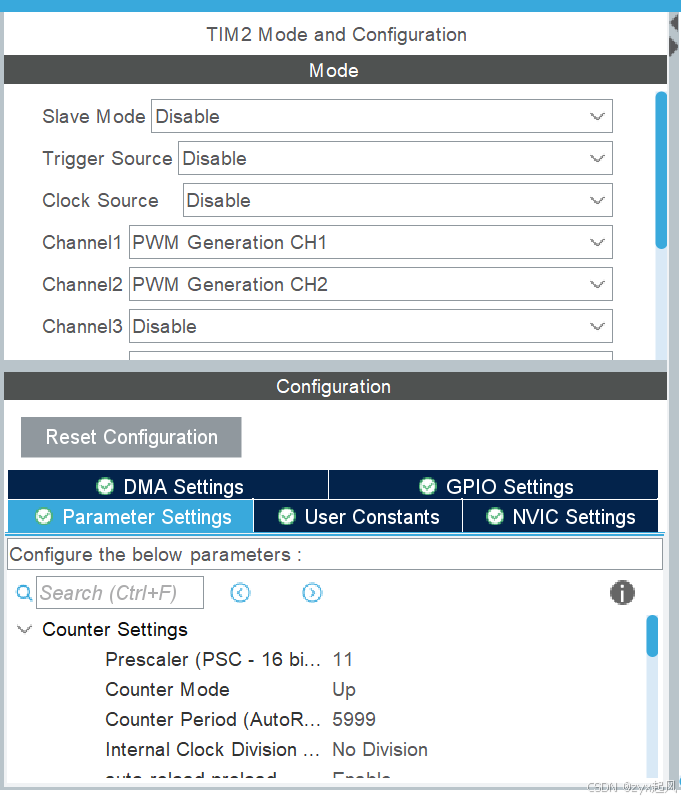
1.cubmax上的配置
首先是电机的pwm波,这个和以往小车的配置一样
2.编码器数值的获取(单独使用两个定时器)将combined channels设置为encoder mode模式
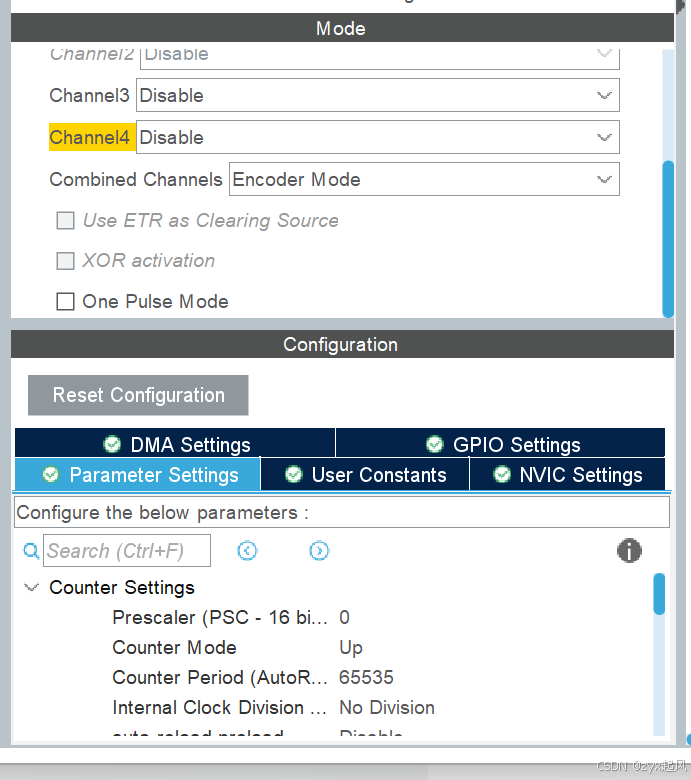
接下来是代码部分:
获取编码器的数值
int16_t getEncoderleft(void)
{
int16_t Encoder_left_raw = (short) __HAL_TIM_GET_COUNTER(&htim4); // 获取原始左编码器值
__HAL_TIM_SET_COUNTER(&htim4, 0); // 编码器脉冲清0
return Encoder_left_raw;
}
int16_t getEncoderright(void)
{
int16_t Encoder_right_raw = (short) __HAL_TIM_GET_COUNTER(&htim3); // 获取原始右编码器值
__HAL_TIM_SET_COUNTER(&htim3, 0); // 编码器脉冲清0
return Encoder_right_raw;
}驱动代码:
void Load(int moto1,int moto2)
{
moto1 = moto1 > 5900? 5900: moto1;
moto1 = moto1 < -5900? -5900: moto1;
moto2 = moto2 > 5900? 5900: moto2;
moto2 = moto2 < -5900? -5900: moto2;
if(moto1>0)//Left
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, GPIO_PIN_SET);//反转
}
else
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, GPIO_PIN_RESET);//正转
moto1 = -moto1;
}
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,moto1);
if(moto2>0)//Right
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_15, GPIO_PIN_SET);//正转
}
else
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_15, GPIO_PIN_RESET);//反转
moto2 = -moto2;
}
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_2,moto2);
}
到这里大家可以看看自己的编码器值知否正确,一般来说转起来后会稳定在几十到几百
如果上面的功能均实现了,那么恭喜你,制作平衡车的所有准备已经准备好了
4.pid的编写
这里使用的是串级pid
#include "pid.h"
//float Balance_kp = 0,Balance_kd = 0;//0.9
float Balance_kp = 300,Balance_kd = 1.1;//430 0.9
//float speed_kp = 0,speed_ki = 0/200; //0.064
float speed_kp = -0.007,speed_ki = -0.007/200; //0.0075
//float turn_kp = 170,turn_kd = 0.5;//165
float turn_kp = -170,turn_kd = 0;
//直立环
float Balance( float target , float roll, float Gyro_x)//俯仰角,目标角度
{
int speed;
speed = Balance_kp*(roll - target)+Balance_kd*Gyro_x;
return speed;
}
//速度环
float speed1(int encoder_left,int encoder_right,int target )
{
static float err_lowout_last,enconder_s;
float a=0.7;
float err ,err_lowout ,speed;
//偏差值
err = (encoder_right + encoder_left) - target;
//低通滤波
err_lowout = (1-a)*err + a*err_lowout_last;
speed = speed_kp*err_lowout+speed_ki*enconder_s;
//积分
enconder_s+=err_lowout;
//限幅
if(enconder_s>20000) enconder_s=20000;
if(enconder_s<-20000) enconder_s=-20000;
err_lowout_last = err_lowout;
return speed;
}
//转向环
//角速度,角度值
float turn(float data)
{
float err=0;
float target=0,result=0;
static float sum_err =0;
err=data-target;
result=turn_kp*err;//+turn_kd*sum_err;
// if(result > 2500 ) result = 2500;
// if(result < -2500 ) result = -2500;
// sum_err+=err;
return result;
}
详细调参和代码讲解请参考:
【草履虫都能学会的STM32平衡小车教程(软件篇)】 https://www.bilibili.com/video/BV1zx4y1y7ZR/?share_source=copy_web&vd_source=495bd57f5ed50cfefc6cd2d6b1bd3f25
最后是我的代码部分,大家可以参考一下
链接: https://pan.baidu.com/s/1-9Vstj5v0Wgqkm1AFrCt_w?pwd=k8g8 提取码: k8g8

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









