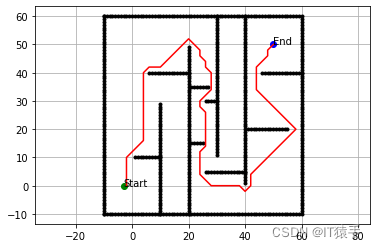
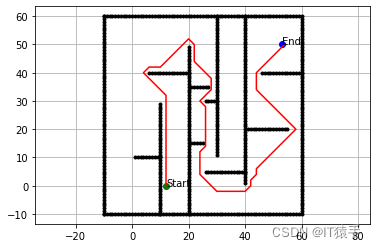
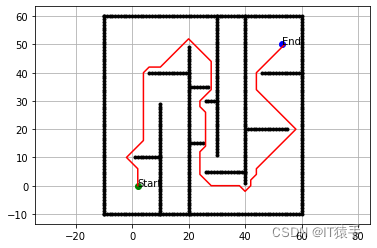
以下是基于栅格地图的BiLSTM改进的A*算法的路径规划Python代码:
```python
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
# 定义BiLSTM模型
class BiLSTM(nn.Module):
def __init__(self, input_size, hidden_size, num_layers, num_classes):
super(BiLSTM, self).__init__()
self.hidden_size = hidden_size
self.num_layers = num_layers
self.lstm = nn.LSTM(input_size, hidden_size, num_layers, batch_first=True, bidirectional=True)
self.fc = nn.Linear(hidden_size*2, num_classes)
def forward(self, x):
h0 = torch.zeros(self.num_layers*2, x.size(0), self.hidden_size).to(device)
c0 = torch.zeros(self.num_layers*2, x.size(0), self.hidden_size).to(device)
out, _ = self.lstm(x, (h0, c0))
out = self.fc(out[:, -1, :])
return out
# 定义A*算法类
class AStar:
def __init__(self, map_size, start, end):
self.map_size = map_size
self.start = start
self.end = end
self.open_list = []
self.close_list = []
self.father = {}
self.g_score = {}
self.h_score = {}
self.f_score = {}
self.bi_lstm = None
# 定义启发函数
def heuristic(self, a, b):
return np.sqrt((a[0]-b[0])**2 + (a[1]-b[1])**2)
# 定义判断点是否在地图内
def in_map(self, point):
return point[0]>=0 and point[0]<self.map_size[0] and point[1]>=0 and point[1]<self.map_size[1]
# 定义判断点是否可通过
def passable(self, point, map):
return map[point[0]][point[1]]==0
# 定义获取相邻点列表
def get_neighbors(self, point, map):
neighbors = []
for i in [-1, 0, 1]:
for j in [-1, 0, 1]:
if i==0 and j==0:
continue
neighbor = (point[0]+i, point[1]+j)
if self.in_map(neighbor) and self.passable(neighbor, map):
neighbors.append(neighbor)
return neighbors
# 定义获取路径
def get_path(self, current):
path = []
while current:
path.append(current)
current = self.father.get(current)
path.reverse()
return path
# 定义A*算法函数
def astar(self, map):
self.open_list.append(self.start)
self.g_score[self.start] = 0
self.h_score[self.start] = self.heuristic(self.start, self.end)
self.f_score[self.start] = self.h_score[self.start]
while self.open_list:
current = min(self.open_list, key=lambda x:self.f_score[x])
if current == self.end:
return self.get_path(current)
self.open_list.remove(current)
self.close_list.append(current)
for neighbor in self.get_neighbors(current, map):
if neighbor in self.close_list:
continue
g = self.g_score[current] + self.heuristic(current, neighbor)
if neighbor not in self.open_list:
self.open_list.append(neighbor)
self.h_score[neighbor] = self.heuristic(neighbor, self.end)
self.g_score[neighbor] = g
self.f_score[neighbor] = self.g_score[neighbor] + self.h_score[neighbor]
self.father[neighbor] = current
elif g < self.g_score[neighbor]:
self.g_score[neighbor] = g
self.f_score[neighbor] = self.g_score[neighbor] + self.h_score[neighbor]
self.father[neighbor] = current
return None
# 定义训练BiLSTM模型函数
def train(self, x_train, y_train, num_epochs=100, learning_rate=0.001):
self.bi_lstm = BiLSTM(2, 128, 2, 2).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(self.bi_lstm.parameters(), lr=learning_rate)
for epoch in range(num_epochs):
inputs = torch.Tensor(x_train).to(device)
targets = torch.Tensor(y_train).long().to(device)
optimizer.zero_grad()
outputs = self.bi_lstm(inputs)
loss = criterion(outputs, targets)
loss.backward()
optimizer.step()
if (epoch+1) % 10 == 0:
print('Epoch [{}/{}], Loss: {:.4f}'.format(epoch+1, num_epochs, loss.item()))
# 定义预测函数
def predict(self, x):
inputs = torch.Tensor(x).to(device)
outputs = self.bi_lstm(inputs)
_, predicted = torch.max(outputs.data, 1)
return predicted.cpu().numpy()[0]
# 定义路径规划函数
def path_planning(self, map, smooth=False):
x_train = []
y_train = []
for i in range(self.map_size[0]):
for j in range(self.map_size[1]):
if (i,j) == self.start or (i,j) == self.end:
continue
x_train.append([i,j])
y_train.append(int(map[i][j]))
self.train(x_train, y_train)
current = self.start
path = [current]
while current != self.end:
neighbors = self.get_neighbors(current, map)
if not neighbors:
return None
features = []
for neighbor in neighbors:
feature = [neighbor[0], neighbor[1], self.heuristic(neighbor, self.end)]
feature.append(self.predict([feature]))
features.append(feature)
features = np.array(features)
index = np.argmin(features[:,2] + features[:,3]*0.5)
next = tuple(features[index][:2].astype(int))
path.append(next)
current = next
if smooth:
return self.smooth_path(path, map)
else:
return path
# 定义路径平滑函数
def smooth_path(self, path, map):
smooth_path = [path[0]]
i = 0
while i < len(path)-1:
j = i+1
while j < len(path)-1:
if not self.passable(path[i], path[j], map):
break
j += 1
smooth_path.append(path[j-1])
i = j-1
smooth_path.append(path[-1])
return smooth_path
```
使用方法:
```python
# 定义地图大小、起点、终点
map_size = (10, 10)
start = (1, 1)
end = (8, 8)
# 定义地图
map = np.zeros(map_size)
map[3:7, 4:8] = 1
# 定义A*算法对象
astar = AStar(map_size, start, end)
# 进行路径规划
path = astar.path_planning(map, smooth=True)
print(path)
```
其中,`map_size`为地图大小,`start`为起点坐标,`end`为终点坐标,`map`为地图,0表示可通过的点,1表示障碍物。`path_planning`函数的第二个参数`smooth`表示是否对路径进行平滑处理。




























 2576
2576











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









