






今天给大家推荐一个非常好发高区的思路:融合LSTM和Transformer做时间序列预测!
其不仅能极大提升预测的准确性、稳定性,还能降低计算复杂度,尤其是处理复杂时序数据时!LSTM长于捕捉短期依赖和局部特征,而Transformer则擅长捕捉长期依赖和全局特征,当两者融合时,便能精准地挖掘到数据中的复杂模式与趋势,应对数据中的噪声干扰。
值得一提的是,该思路能够使用的场景也非常丰富,像是电力负荷预测、能源管理、自动驾驶、医疗监测……我们结合具体场景的需求和数据集,便能进行微创新。
此外,结合频域分析、图神经网络、大模型,做模型的轻量化设计等,都是很好的发文切入点!为方便大家理解和运用,我还给大家整理了10篇必读的高分论文,相信能给大家更多启发!
论文原文+开源代码需要的同学看文末
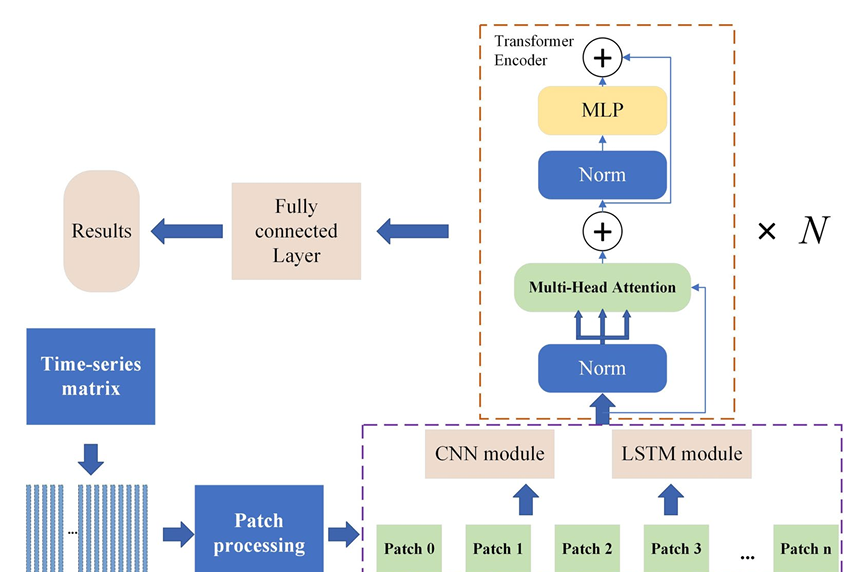
Time series prediction model using LSTM‑Transformer neural network for mine water inflow
内容:这篇文章提出了一种基于LSTM-Transformer神经网络的时间序列预测模型,用于预测矿山突水点的矿井涌水量。研究以黑龙江省宝泰龙矿的涌水量监测数据为样本,通过随机搜索和贝叶斯优化相结合的方法调整模型参数,验证了LSTM-Transformer模型在不同训练集和测试集比例下的性能。结果表明,该模型在预测矿井涌水量时具有最高的预测精度,优于单独的LSTM、CNN、Transformer模型以及CNN-LSTM混合模型。
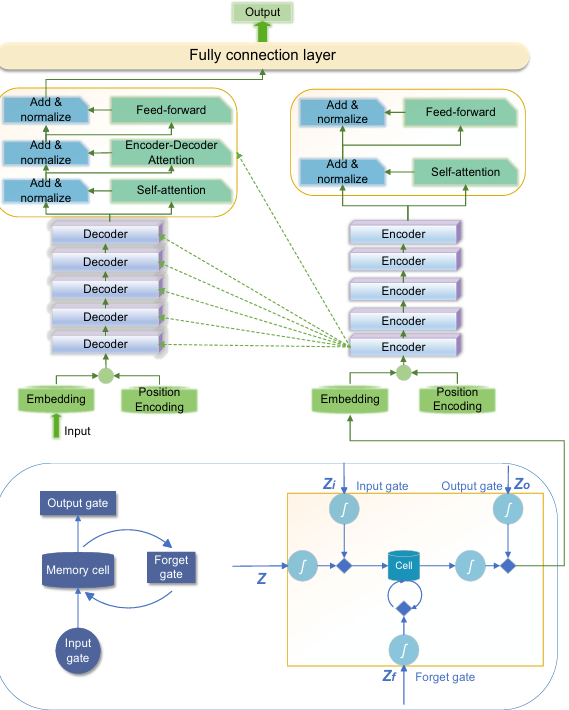
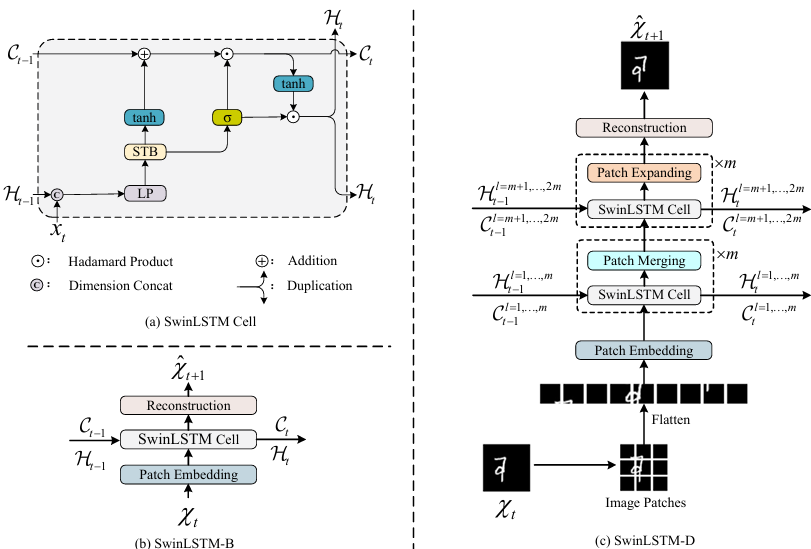
SwinLSTM: Improving Spatiotemporal Prediction Accuracy using Swin Transformer and LSTM
内容:本文提出了一种名为 SwinLSTM 的新型循环单元,用于时空预测任务。SwinLSTM 结合了 Swin Transformer 和简化版的 LSTM,通过替换 ConvLSTM 中的卷积结构,采用自注意力机制来提取时空特征。实验表明,SwinLSTM 在多个数据集上均优于现有的先进方法,特别是在预测精度上显著优于 ConvLSTM。研究结果表明,学习全局空间依赖性对于模型捕捉时空依赖性具有显著优势,SwinLSTM 有望成为时空预测领域的一个强大基线模型。
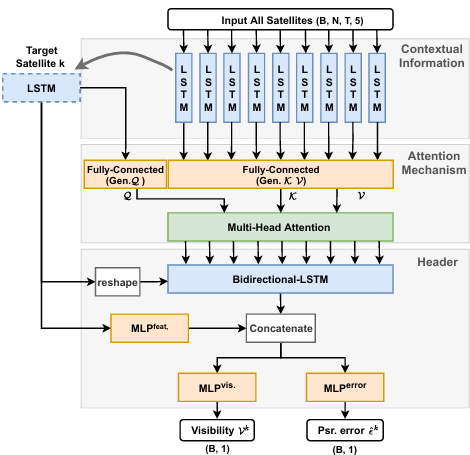
Learning-based NLOS Detection and Uncertainty Prediction of GNSS Observations with Transformer-Enhanced LSTM Network
内容:本文提出了一种基于深度学习的方法,用于检测全球导航卫星系统(GNSS)观测中的非视距(NLOS)信号并预测伪距误差。该方法通过将GNSS观测建模为时空问题,结合Transformer增强的长短期记忆(LSTM)网络来提高模型性能和泛化能力。研究使用来自香港和亚琛的标记数据集进行训练和评估,并引入基于激光雷达地图的GNSS观测标记方法。实验结果表明,该方法在NLOS检测精度和召回率上优于其他模型,并能有效避免轨迹发散,提高车辆定位的可靠性。
A time series driven model for early sepsis prediction based on transformer module
内容:本文提出了一种基于Transformer模块的时间序列驱动模型,用于早期预测脓毒症。研究利用CNN-Transformer和LSTM-Transformer架构,收集患者在脓毒症诊断前4小时、8小时和12小时的时间序列数据进行分析。与传统循环神经网络相比,该模型性能显著提升,平均准确率达到0.964,精确率为0.956,召回率为0.967,F1分数为0.959。此外,通过调整时间窗口,Transformer模型在早期时间窗口(如12小时前)表现出卓越的预测能力,为早期临床诊断和干预提供了重要支持。研究还通过SHAP算法可视化特征权重分布,增强了模型的可解释性。
码字不易,欢迎大家点赞评论收藏!
关注下方《AI科研技术派》
回复【融合时序】获取完整论文
👇

















 1109
1109

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









