







既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
- 插入的节点key值等于当前位置的key值,插入失败
🌈那判断完插入成功与否,是不是就要判断平衡因子的更新了
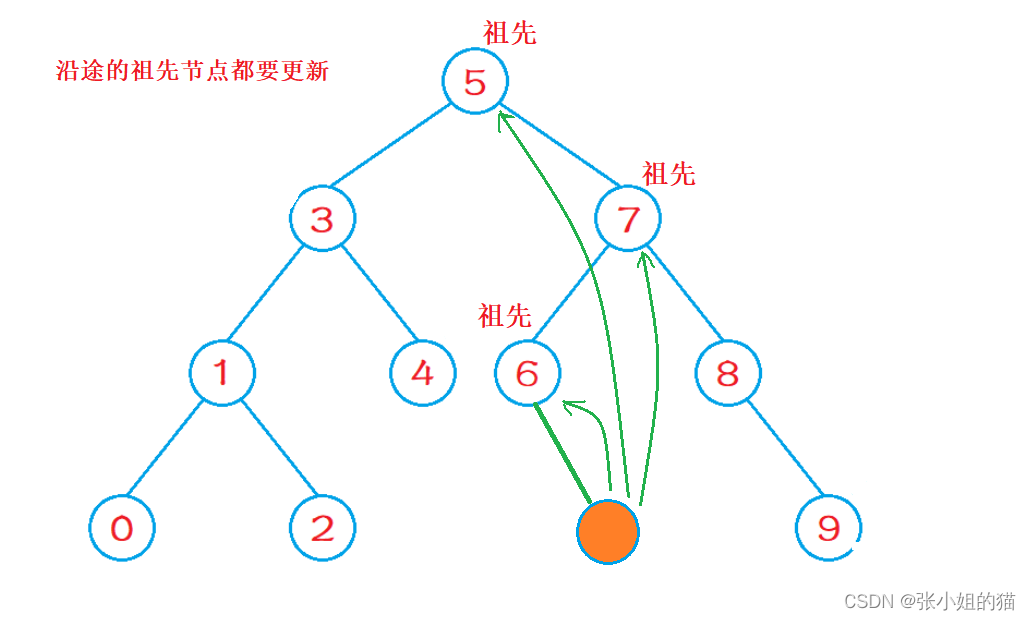
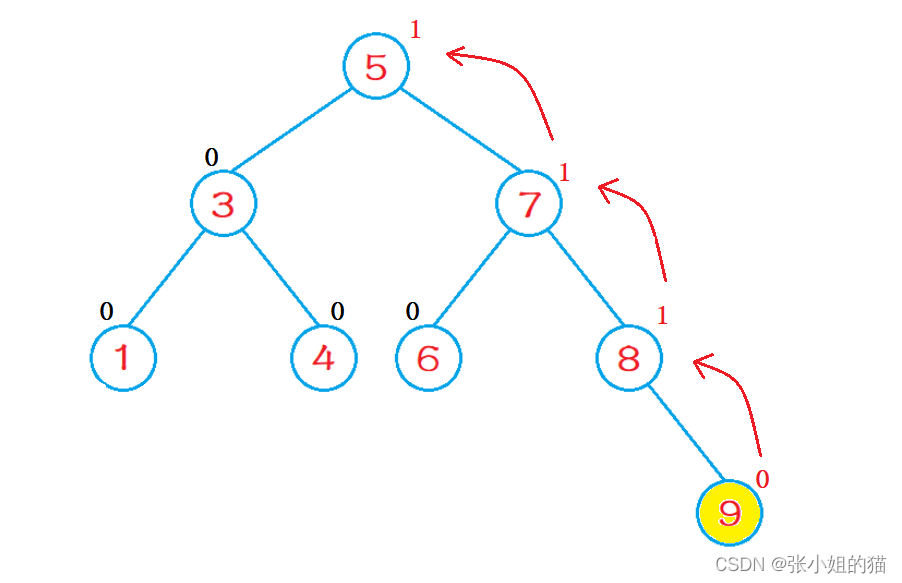
平衡因子是否更新取决于:该结点的左右子树的高度是否发生了变化,因此插入一个结点后,该结点的 祖先结点的平衡因子可能需要更新
🌏更新平衡因子的规则:
- 新增在右,parent ->
bf++;新增在左,parent ->bf --;
每更新完一个结点的平衡因子后,都需要进行以下判断:
- 如果parent的平衡因子等于-1或者1,表明还需要继续往上更新平衡因子
- 如果parent的平衡因子等于0;表明无需往上更新平衡因子
- 如果parent的平衡因子等于-2或者2;就已经不平衡了,需要旋转处理
- 如果parent的平衡因子大于2或者小于-2;就说明之前插入的就不是AVL树了,赶紧去检查💥
| 更新后的平衡因子 | 分析 |
|---|---|
| -1 or 1 | 说明parent插入前的平衡因子是0;左右子树高度相等,插入后有一边高,parent高度变了,则需要往上继续更新 |
| 0 | 说明parent插入前的平衡因子是 -1 or 1;左右子树一边高一边低,插入后两边相等,插入的填上了矮的那一边,parent的高度不变,不需要继续往上更新 |
| -2 or 2 | 说明parent插入前的平衡因子是 -1 or 1;已经是平衡的临界值了;插入后变成-2 or 2 ;打破了平衡,parent所在的子树需要旋转处理 |
最坏的情况如下:一路更新到root根节点
那么我们更新平衡因子时第一个更新的就是parent结点的平衡因子,更新完parent结点的平衡因子后,若是需要继续往上进行平衡因子的更新,向上递归,直到parent为空的情况,以下逻辑是必须的
cur = parent;
parent = parent->_parent;
当平衡因子出现了2/-2的情况,要对子树进行旋转处理,但也要遵守原则
- 旋转成平衡树
- 保持搜索树的规则
而旋转有四种大情况,对此我们要进行分类:
- 当parent的平衡因子为2,cur的平衡因子为1时,进行左单旋
- 当parent的平衡因子为-2,cur的平衡因子为-1时,进行右单旋
- 当parent的平衡因子为-2,cur的平衡因子为1时,进行左右双旋
- 当parent的平衡因子为2,cur的平衡因子为-1时,进行右左双旋
注意:旋转过后无需再往上更新平衡因子了,因为高度已经没有发生变化了,也就不会影响父节点的平衡因子了
//插入
bool Insert(const pair<K, V>& kv)
{
//若为空树,直接插入作为根节点
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
//和二叉搜索树类似,找到该插入的节点位置
Node\* parent = nullptr;
Node\* cur = _root;
while (cur)
{
if (cur->_kv.first < kv.first)//插入节点值大于当前节点的key
{
parent = cur;
cur = cur->_right;//往右走
}
else if (cur->_kv.first > kv.first)//插入节点值小于当前节点的key
{
parent = cur;
cur = cur->_left;//往左走
}
else
{
//插入的节点key值等于当前位置的key值,插入失败
return false;
}
}
//开始插入
cur = new Node(kv);
if (parent->_kv.first < kv.first)
{
parent->_right = cur;
}
else if (parent->_kv.first < kv.first)
{
parent->_left = cur;
}
//连接parent
cur->_parent = parent;
//控制平衡
//1、更新平衡因子
while (parent)
{
if (cur == parent->right)
{
parent->_bf++;
}
else
{
parent->_bf--;
}
if (parent->_bf == -1 || parent->_bf == 1)//也可以用abs
{
cur = parent;
parent = parent->_parent;
}
else if (parent->_bf == 0)
{
break;
}
else if (parent->_bf == -2 || parent->_bf == 2)
{
//说明parent所在的子树已经不平衡了,需要旋转
if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);//左单旋
}
else if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);//右单旋
}
else if (parent->_bf == -2 && cur->_bf == 1)
{
RotateLR(parent);//左右双旋
}
break;
}
else
{
assert(false);//在插入前树的平衡因子就有问题
}
}
return true;
}
四. AVL树的旋转
🥑左单旋
新节点插入较高右子树的右侧—右右:左单旋
⚡动图展示:
抽象图过程解析:
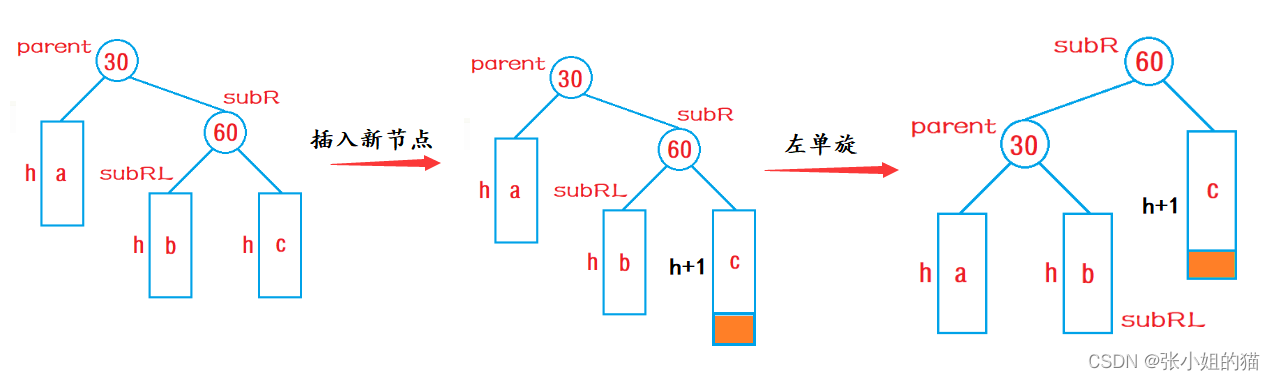
其中h可以等于0、1、2等等,不过都可以归纳到这种大情况,处理情况都一样,都是引发parent 等于2,cur等于1
左单旋旋转步骤:
- subRL变成parent的右子树(
subL和parent的关系,要注意🔥subL可能为空) - parent成为subR的左子树(
parent和subLR的关系) - subR成为根节点(
ppNode 和 subL关系,也要注意🔥parent是子树的根还是整棵树的根) - 最后更新平衡因子
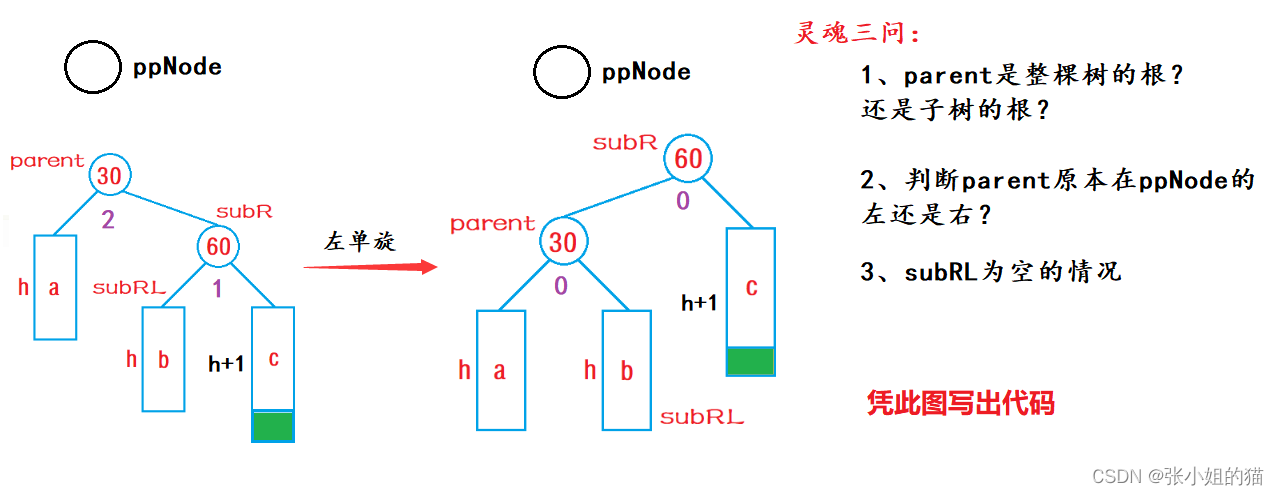
为什么要这样旋转?要符合二叉搜索树规则
- subR的左子树的值本身就比parent的值要大,所以可以作为parent的右子树
- parent及其左子树当中结点的值本身就比subR的值小,所以可以作为subR的左子树
平衡因子更新:
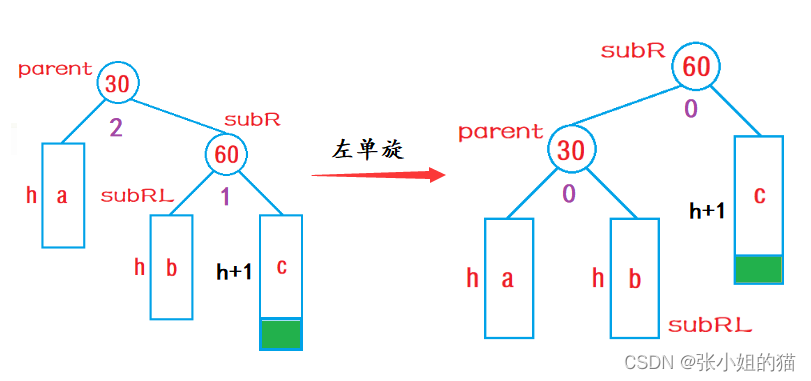
可以看见,左单旋后树的高度就平衡了,也就无需继续向上更新平衡因子了
代码实现如下:(详细注释)
void RotateL(Node\* parent)
{
//三叉链
Node\* subR = parent->_right;
Node\* subLR = subR->_left;
Node\* ppNode = parent->_parent;
//subR 和 parent之间的关系
subR->_left = parent;
parent->_parent = subR;
//subRL 和 parent之间的关系
subRL = parent->_right;
if (subRL)
subRL->parent = parent;
//ppNode 和 subR的关系
if (ppNode == nullptr)
{
_root = subR;
subR->_parent = nullptr;//没有父节点,所以为空
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
//更新平衡因子
subR->_bf = parent->_bf = 0;
}
🥑右单旋(和左单旋高度相似)
新节点插入较高左子树的左侧—左左:右单旋
动图演示:
 抽象图过程解析:
抽象图过程解析:
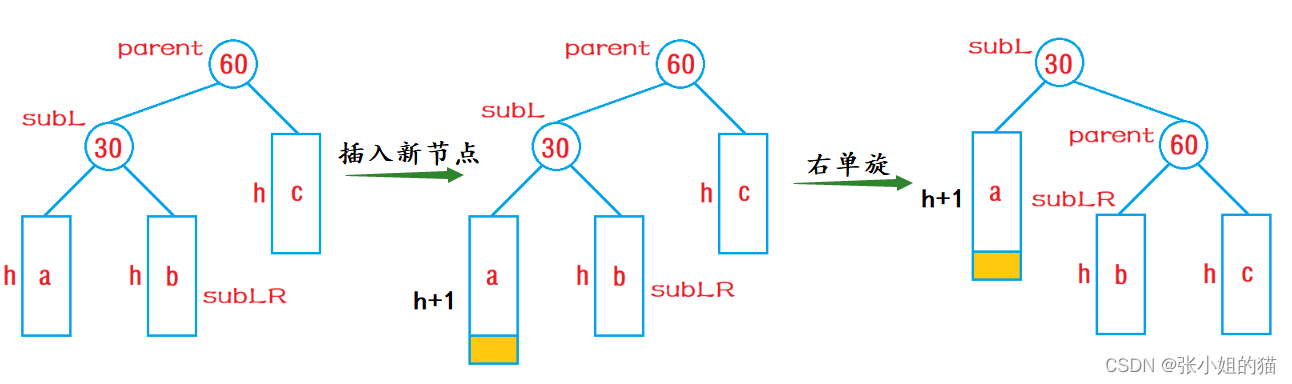
右单旋旋转步骤:
与左单旋雷同,看上面就行
同样也要满足二叉搜索树的性质:也是和左单旋雷同,看上面就行
平衡因子更新如下:
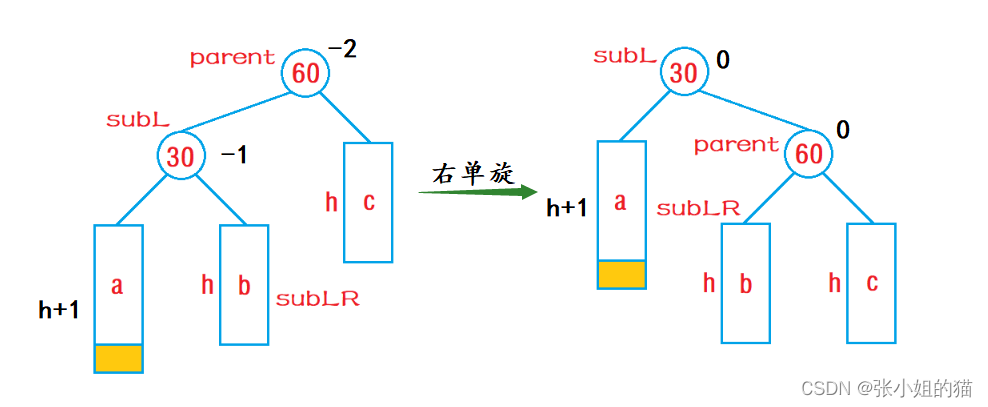 同样右单旋后,parent的平衡因子为0,左右子树高度相等,也就无需继续往上更新平衡因子了
同样右单旋后,parent的平衡因子为0,左右子树高度相等,也就无需继续往上更新平衡因子了
话不多说上代码:
//右单旋
void RotateR(Node\* parent)
{
Node\* subL = parent->_left;
Node\* subLR = subL->_right;
Node\* ppNode = parent->_parent;
//subL 和 parent的关系
subL->_right = parent;
parent->_parent = subL;
//subLR 和 parent之间的关系
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
//ppNode 和 subL的关系
if (ppNode == nullptr)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left == subL;
}
else
{
ppNode->_right == subL;
}
subL->_parent = ppNode;
}
//更新平衡因子
subL->_bf = parent->_bf = 0;
}
🔥左右单旋
新节点插入较高左子树的右侧—左右:先左单旋再右单旋、
动图演示:
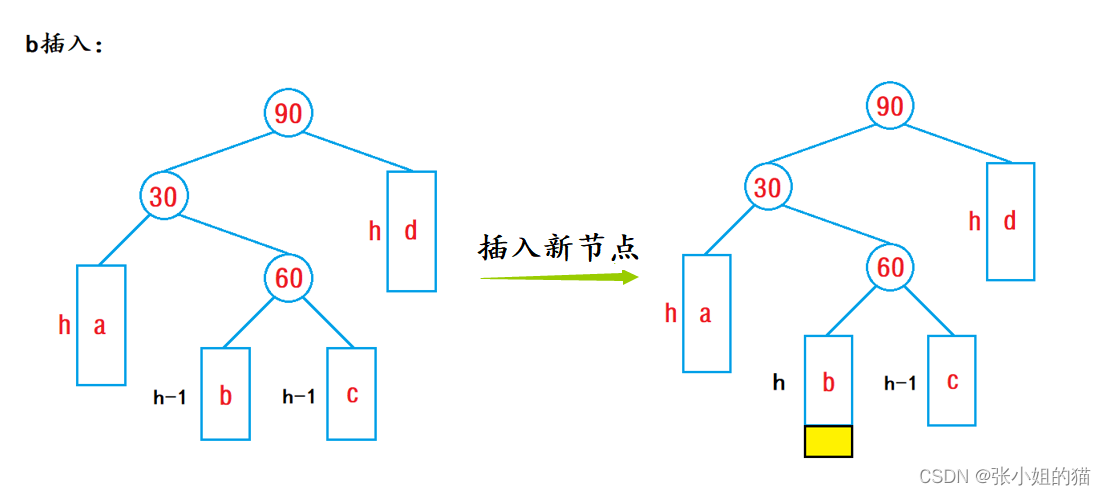
在b树或者c树中新增节点,均会引发左右双旋
旋转示意图如下:
1、插入新节点
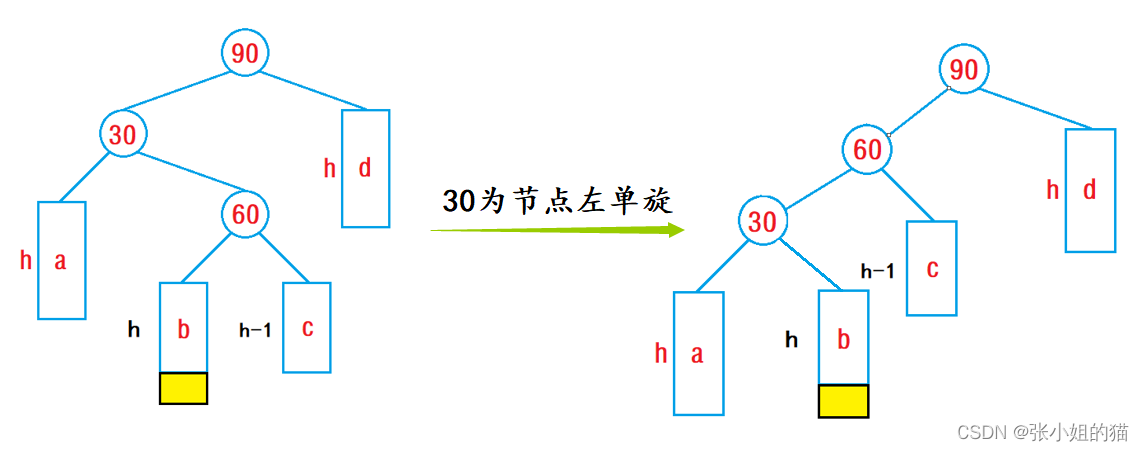
2、以30为旋转点进行左单旋
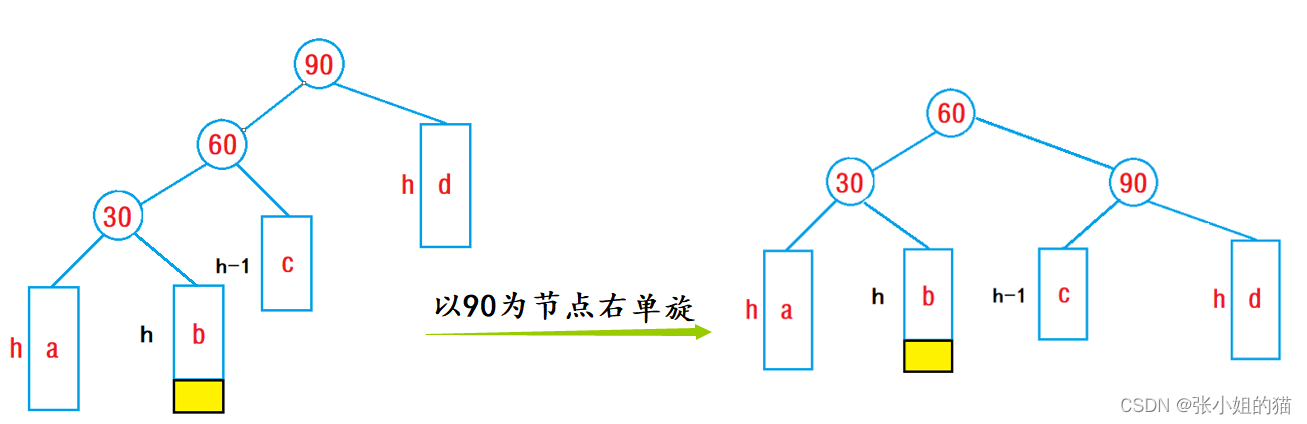
3、以90为旋转点进行右单旋
左右单旋的步骤如下:
- 以subL为节点左单旋
- 以parent为节点右单旋
- 更新平衡因子(这才是重点)
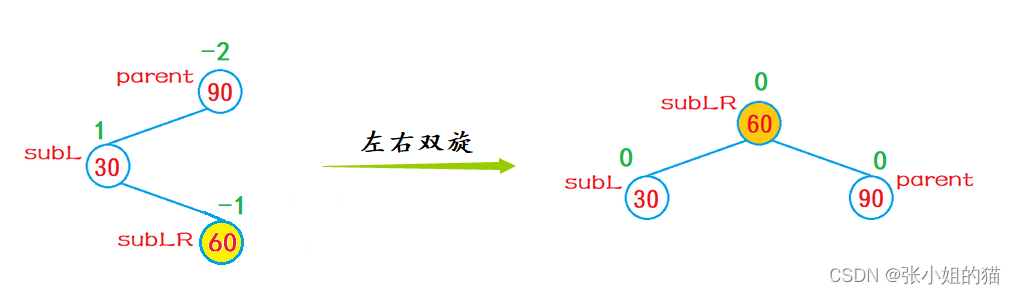
左右双旋后满足二叉搜索树的性质:
实际上就是把subLR的左子树和右子树,分别作为subL和parent的右子树和左子树,再让subL和parent分别作为subLR的左右子树,最后让subLR作为整个子树的根(看图理解)
- subLR左子树的节点值比subL的值大,所以可以作为subL的右子树
- subLR右子树的节点值比parent的值小,因此可以作为parent的左子树
- 前两个步骤之后,subL以及子树的值,和parent的值均符合,所以可以当subLR的左右子树
重点来了:(以subLR为突破口)
左右双旋后,平衡因子的更新随着subLR原始平衡因子的不同分为以下三种情况:
- 当subLR原始平衡因子是-1时,左右双旋后parent、subL、subLR的平衡因子分别更新为1、0、0
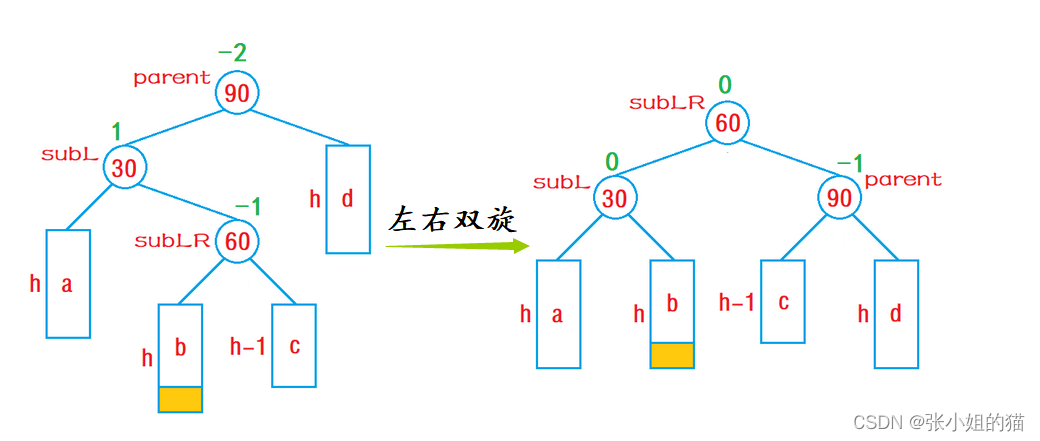
- 当subLR原始平衡因子是1时,左右双旋后parent、subL、subLR的平衡因子分别更新为0、-1、0
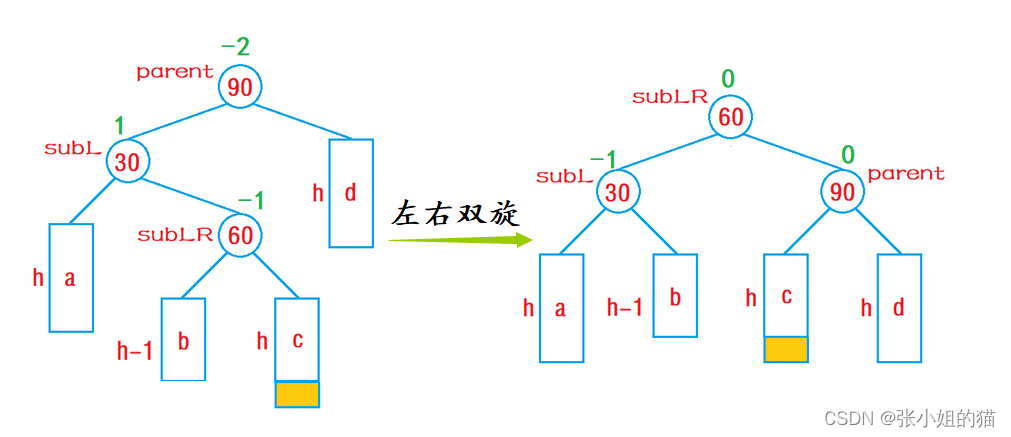
- 当subLR原始平衡因子是0时,左右双旋后parent、subL、subLR的平衡因子分别更新为0、0、0
经过左右双旋后,即树的高度没有发生变化,所以无需继续往上更新平衡因子
话不多说,代码实现一下吧:
void RotateLR(Node\* parent)
{
Node\* subL = parent->_left;
Node\* subLR = subL->_right;
int bf = subLR->_bf;
//subL节点左单旋
RotateL(subL);
//parent节点进行右单旋
RotateR(parent);
//更新平衡因子
if (bf == 1)
{
subLR->_bf = 0;
subL->_bf = -1;
parent->_bf = 0;
}
else if (bf == -1)
{
subLR->_bf = 0;
subL->_bf = 0;
parent->_bf = 1;
}
else if(bf == 0)
{
subLR->_bf = 0;
subL->_bf = 0;
parent->_bf = 0;
}
else
{
assert(false);//旋转前的平衡因子就出错了
}
}
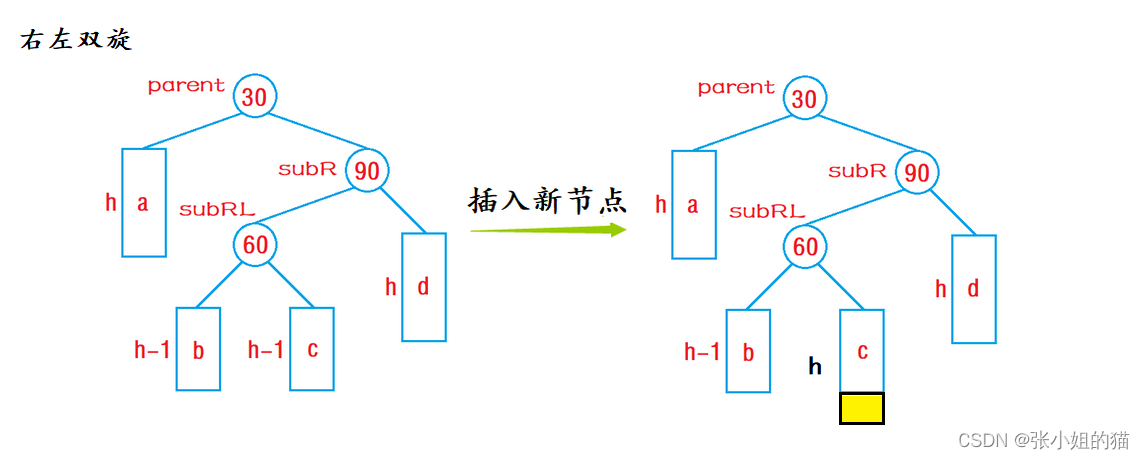
🔥右左单旋
动图演示:
旋转图演示过程:
1、插入新节点
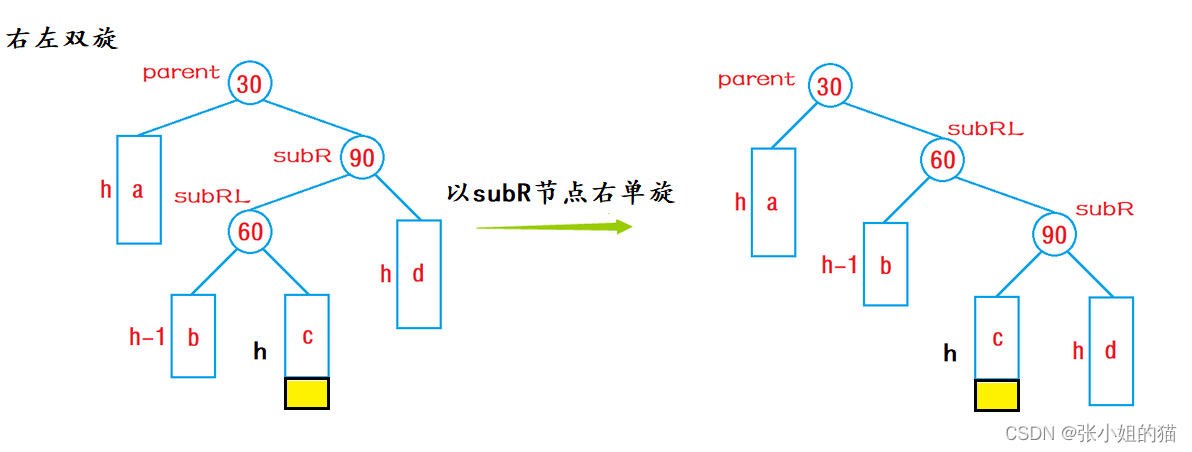
2、以subR的节点进行右单旋
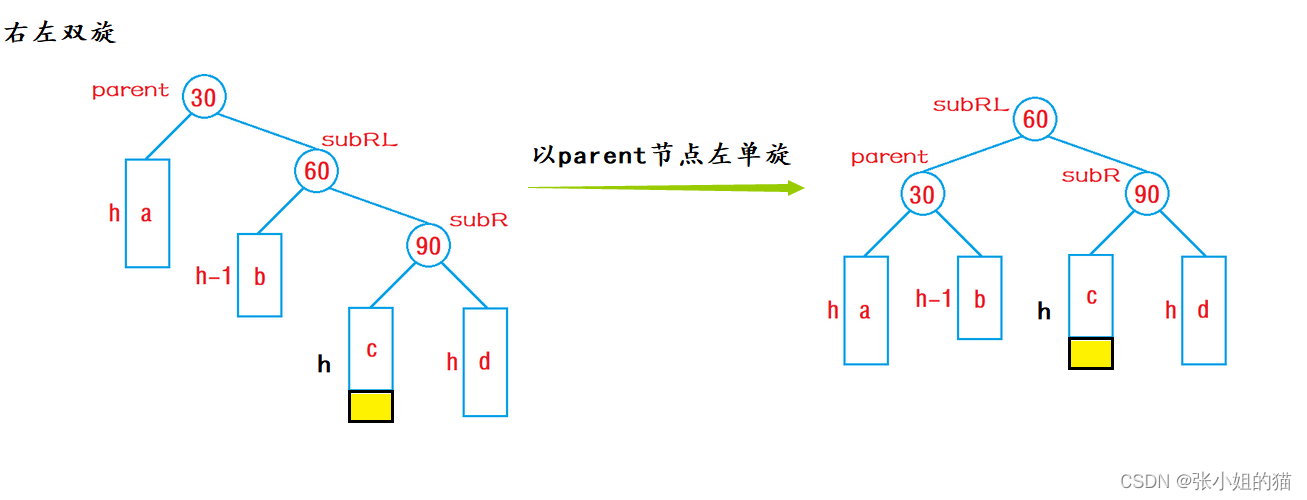
3、以parent的节点进行右单旋
旋转步骤和左右双旋雷同
重点来了:(以subRL为突破口)
左右双旋后,平衡因子的更新随着subRL 原始平衡因子的不同分为三种情况分别对应subRL = 0、1、2情况,此处就不多赘述了,详细可以浏览左右双旋的,情况一样
代码实现
void RotateRL(Node\* parent)
{
Node\* subR = parent->_right;
Node\* subRL = subR->_left;
int bf = subRL->_bf;
//subR右单旋
RotateR(subR);
//parent进行左单旋
RotateL(parent);
if (bf == 1)
{
subRL->_bf = 0;
subR->_bf = 0;
parent->_bf = -1;
}
else if (bf == -1)
{
subRL->_bf = 0;
subR->_bf = 1;
parent->_bf = 0;
}



**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**
arent进行左单旋
RotateL(parent);
if (bf == 1)
{
subRL->_bf = 0;
subR->_bf = 0;
parent->_bf = -1;
}
else if (bf == -1)
{
subRL->_bf = 0;
subR->_bf = 1;
parent->_bf = 0;
}
[外链图片转存中...(img-xvzFf8fA-1715617851331)]
[外链图片转存中...(img-tyiq4Sco-1715617851332)]
[外链图片转存中...(img-vTIwcAwz-1715617851332)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**















 889
889











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









