







 文章探讨了单目测距和双目测距技术,特别是如何利用YOLOv5进行目标检测、深度估计和距离测量。3D目标检测则涉及激光雷达、RGB-D相机和立体视觉等多传感器融合。还介绍了图像去雾和去雨的图像处理技术。
文章探讨了单目测距和双目测距技术,特别是如何利用YOLOv5进行目标检测、深度估计和距离测量。3D目标检测则涉及激光雷达、RGB-D相机和立体视觉等多传感器融合。还介绍了图像去雾和去雨的图像处理技术。
往期热门大项目合集:
Yolov5双目测距-双目相机计数及测距教程(含代码)_yolov5测距-CSDN博客
yolov5 deepsort 行人/车辆(检测 +计数+跟踪+测距+测速)_利用yolov5进行车辆跟踪-CSDN博客
图像去雾/图像去雨(matlab/python)_图像去雾去雨+目标检测-CSDN博客
单目测距
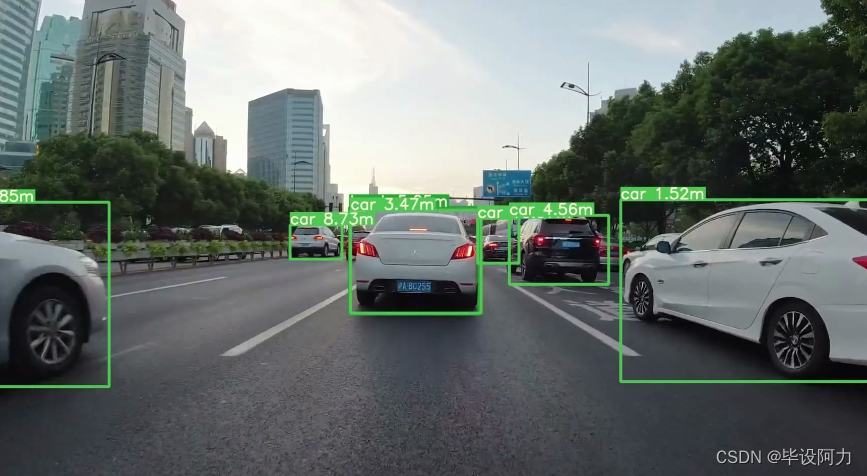
是一种计算机视觉技术,主要用于通过单一的摄像头来估计物体与摄像头之间的距离。这种方法利用的是几何和物理原理,通常是基于透视投影模型以及已知的相机内在参数(例如焦距、主点坐标)和外部环境信息(如物体尺寸)。
- 相机标定:通过标定板或者专门的标定算法确定相机的内参矩阵(包括焦距、主点坐标、镜头畸变系数等)。
- 特征提取与匹配:在连续帧之间或与数据库中的已知对象进行特征匹配,以便识别出感兴趣的物体并确定其在图像上的位置和大小。
- 立体几何或运动假设:如果可能,结合摄像头的移动信息(如从连续图像间的视差变化)来进一步提高测距精度。
- 深度学习方法<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 911
911

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









