








网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
OcTree是一种更容易理解也更自然的思想。对于一个空间,如果某个角落里有个盒子我们却不知道在哪儿。显而易见的方法就是把空间化成8个卦限,然后询问在哪个卦限内。再将存在的卦限继续化成8个。意思大概就是太极生两仪,两仪生四象,四象生八卦,就这么一直划分下去,最后一定会确定一个非常小的空间。对于点云而言,只要将点云的立方体凸包用octree生成很多很多小的卦限,那么在相邻卦限里的点则为相邻点。
显然,对于不同点云应该采取不同的搜索策略,如果点云是疏散的,分布很广泛,且没什么规律(如lidar测得的点云或双目视觉捕捉的点云)kdTree能更好的划分,而octree则很难决定最小立方体应该是多少。太大则一个立方体里可能有很多点云,太小则可能立方体之间连不起来。如果点云分布非常规整,是某个特定物体的点云模型,则应该使用ocTree,因为很容易求解凸包并且点与点之间相对距离无需再次比对父节点和子节点,更加明晰。典型的例子是斯坦福的兔子。
欧几里得与区域生长算法
基于欧式距离的分割和基于区域生长的分割本质上都是用区分邻里关系远近来完成的。由于点云数据提供了更高维度的数据,故有很多信息可以提取获得。欧几里得算法使用邻居之间距离作为判定标准,而区域生长算法则利用了法线,曲率,颜色等信息来判断点云是否应该聚成一类。
2.1.欧几里得算法
从前有一个脑筋急转弯,说一个锅里有两粒豆子,如果不用手,要怎么把它们分开。当时的答案是豆子本来就是分开的,又没黏在一起,怎么不叫分开。OK,实际上欧几里德算法就是这个意思。两团点云就像是两粒豆子,只要找到某个合适的度量方式,就有办法把点云和点云分开。
如果两团点云之间最近两点的距离小于单个点云内部点之间的距离,则可以由算法判断其分为两类。假设总点云集合为A,聚类所得点云团为Q
具体的实现方法大致是:
- 找到空间中某点p10,用kdTree找到离他最近的n个点,判断这n个点到p的距离。将距离小于阈值r的点p12,p13,p14…放在类Q里
- 在 Q里找到一点p12,重复1
- 在 Q里找到一点p13,重复1,找到p22,p23,p24…全部放进Q里.
- 当 Q 再也不能有新点加入了,则完成搜索了
听起来好像这个算法并没什么用,因为点云总是连成片的,很少有什么东西会浮在空中让你来分。但是如果和前面介绍的内容联系起来就会发现这个算法威力巨大了。比如:
- 半径滤波删除离群点
- 采样一致找到桌面,抽掉桌面
显然,一旦桌面被抽,桌上的物体就自然成了一个个的浮空点云团。就能够直接用欧几里德算法进行分割了。如图所示。
区域生长算法
1、基于法线和曲率
区域生长算法直观感觉上和欧几里德算法相差不大,都是从一个点出发,最终占领整个被分割区域。欧几里德算法是通过距离远近,来判断烧到哪儿。区域生长算法则不然,烧到哪儿靠燃料(点)的性质是否类似来决定。对于普通点云,其可由法线、曲率估计算法获得其法线和曲率值。通过法线和曲率来判断某点是否属于该类。其算法可以总结为:
- 种子周围的点和种子相比
- 法线方向是否足够相近
- 曲率是否足够小
- 如果满足1,2,则该点可用做种子
- 如果只满足1,则归类而不做种
- 从某个种子出发,直到其“子种子”不再出现,则一类聚集完成
- 类的规模既不能太大也不能太小
显然,上述算法是针对小曲率变化面设计的。尤其适合对连续阶梯平面进行分割:比如SLAM算法所获得的建筑走廊。
2、基于颜色:
除了普通点云之外,还有一种特殊的点云,成为RGB点云。显而易见,这种点云除了结构信息之外,还存在颜色信息。颜色信息可以很好的将复杂场景中的特殊物体分割出来。而颜色点云也并不那么遥不可及,Xbox Kinect就可以轻松的捕捉颜色点云。
基于颜色的区域生长分割原理上和基于曲率,法线的分割方法是一致的。只不过比较目标换成了颜色,去掉了点云规模上限的限制。可以认为,同一个颜色且挨得近,是一类的可能性很大,不需要上限来限制。所以这种方式比较适合用于室内场景分割。尤其是复杂室内场景,颜色分割可以轻松的将连续的场景点云变成不同的物体。哪怕是高低不平的地面,没法用采样一致分割器抽掉,颜色分割算法同样能完成分割任务。
3.基于点云频率的分割(滤波)方法
点云的频率
点云和图像一样,有可能也存在频率的概念。点云表达的是三维空间中的一种信息,这种信息本身并没有一一对应的函数值。故点云本身并没有在讲诉一种变化的信号。点云虽然没有明确的时间关系,但应该会存在某种空间关系(例如LiDar点云)。我们可以人为的指定点云空间中的一个点(例如Scan的重心或LiDar的“源”),基于此点来讨论点云在各个方向上所谓的频率。
在传统的信号处理中,高频信号一般指信号变化快,低频信号一般指信号变化缓慢。在图像处理中,高低频的概念被引申至不同方向上图像灰度的变化,**在点云处理中,定义点云法线向量差为点云所表达的信号。**换言之,如果某处点云曲率大,则点云表达的是一个变化的信号。如果点云曲率小,则其表达的是一个不变的信号。这和我们的直观感受也是相近的,地面曲率小,它表达的信息量也小;人的五官部分曲率大,表达更大的信息量。
DoN算法
使用频率信息的思想已经被广泛的应用在了各个方面,最著名的莫过于DoN算法。DoN算法被作者归类于点云分割算法中,但本质上DoN只是一种前处理,应该算是一种比较先进的点云滤波算法。分割本质上还是由欧式分割算法完成的。DoN 是 Difference of Normal 的简写。算法的目的是在去除点云低频滤波,低频信息(例如建筑物墙面,地面)往往会对分割产生干扰,高频信息(例如建筑物窗框,路面障碍锥)往往尺度上很小,直接采用 基于临近信息 的滤波器会将此类信息合并至墙面或路面中。所以DoN算法利用了多尺度空间的思想,算法如下:
- 在小尺度上计算点云法线1
- 在大尺度上计算点云法线2
- 法线1-法线2
- 滤去3中值较小的点
- 欧式分割

显然,在小尺度上是可以对高频信息进行检测的,此算法可以很好的小尺度高频信息。其在大规模点云中优势尤其明显。算法运行过程可用图表示为:

from:http://www.pointclouds.org/documentation/tutorials/don_segmentation.php
4、最小割算法
点云分割的精度
基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出来)。基于欧式算法的点云分割面对有连接的点云就无力了(比如风筝和人,在不用三维形态学去掉中间的线之前,是无法分割风筝和人的)。基于法线等信息的区域生长算法则对平面更有效,没法靠它来分割桌上的碗和杯子。
我们还需要一个方法来解决分割的“好不好”这个问题。也就是说,有没有哪种方法,可以在一个点不多,一个点不少的情况下,把目标和“其他”分开。
最小割(min-cut)早就用在网络规划,求解桥问题,图像分割等领域,被移植到点云分割上也不足为奇。最小割算法是图论中的一个概念,其作用是以某种方式,将两个点分开,当然这两个点中间可能是通过无数的点再相连的。如图所示。
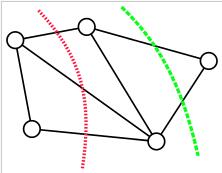
如果要分开最左边的点和最右边的点,红绿两种割法都是可行的,但是红线跨过了三条线,绿线只跨过了两条。单从跨线数量上来论可以得出绿线这种切割方法更优的结论。但假设线上有不同的权值,那么最优切割则和权值有关了。它到底是怎么找到那条绿线的暂且不论。总而言之,就是有那么一个算法,当你给出了点之间的**“图” (广义的)**,以及连线的权值时,最小割算法就能按照你的要求把图分开。
点云 “图”
切割有两个非常重要的因素,第一个是获得点与点之间的拓扑关系,也就是生成一张“图”。第二个是给图中的连线赋予合适的权值。点云有天然分开的点,是一种非常适合分割的对象。有了点之后,只要把点云中所有的点连起来就可以了。连接算法如下:
- 找到每个点最近的n个点
- 将这n个点和父点连接
- 找到距离最小的两个块(A块中某点与B块中某点距离最小),并连接
- 重复3,直至只剩一个块
现在已经有了“图”,只要给图附上合适的权值,就完成了所有任务。物体分割给人一个直观印象就是属于该物体的点,应该相互之间不会太远。也就是说,可以用点与点之间的欧式距离来构造权值。所有线的权值可映射为线长的函数。

分割总是有一个目标的——目标需要人为指定(center),尺寸需要提前给出(radius)。
我们指定了目标物体上的一个点,接下来要做的,就是让除此对象之外的物体被保护起来,保护的方法就是认为加重目标范围之外的权值(罚函数)
backgroundPenalty=(\frac{distanceToCenter}{radius})
5、超体聚类分割方法
超体(supervoxel)是一种集合,集合的元素是“体”。与体素滤波器中的体类似,其本质是一个个的小方块。与之前提到的所有分割手段不同,**超体聚类的实质是对点云实施过分割(over segmentation),将场景点云化成很多小块,并研究每个小块之间的关系。将更小单元合并的分割思路。**本质上这种方法是对局部的一种总结,纹理,材质,颜色类似的部分会被自动的分割成一块,有利于后续识别工作。比如对人的识别,如果能将头发,面部,四肢,躯干分开,则能更好的对各种姿态,性别的人进行识别。
点云和图像不一样,其不存在像素邻接关系。所以,超体聚类之前,必须以八叉树对点云进行划分,获得不同点团之间的邻接关系。与图像相似点云的邻接关系也有很多,如面邻接,线邻接,点邻接。其具体解释如下图:
基于超体聚类的点云分割,使用点邻接(蓝色)作为相邻判据。
超体聚类的实现步骤
超体聚类实际上是一种特殊的区域生长算法,和无限制的生长不同,超体聚类首先需要规律的布置区域生长“晶核”。晶核在空间中实际上是均匀分布的,并指定晶核距离(Rseed)。再指定粒子距离(Rvoxel)。再指定最小晶粒(MOV),过小的晶粒需要融入最近的大晶粒。关系如图所示:

有了晶粒和结晶范围之后,我们只需要控制结晶过程,就能将整个空间划分开了。结晶过程的本质就是不断吸纳类似的粒子(八分空间)。类似是一个比较模糊的概念,关于类似的定义有以下公式:
公式中的表示颜色上的差异,
表示法线上的差异,
代表点距离上的差异。
表示一系列权重。用于控制结晶形状。在晶核周围寻找一圈,D最小的体素被认为是下一个“被发展的党员”。需要注意的是,结晶过程并不是长完一个晶核再长下一个,二是所有的晶核同时开始生长(虽然计算机计算时必然有先后,但从层次上来说是同时的)。其生长顺序如下图所示:
接下来所有晶核继续公平竞争,发展第二个“党员”,以此循环,最终所有晶体应该几乎同时完成生长。整个点云也被晶格所分割开来。并且保证了一个晶包里的粒子都是类似的。
6、基于凹凸型的分割
对于二维图像而言,其凹凸性较难描述,但对于三维图像而言,凹凸几乎是与生俱来的性质。
6.1、LCCP方法
LCCP是Locally Convex Connected Patches的缩写,翻译成中文叫做 ”局部凸连接“, LCCP方法并不依赖于点云颜色,所以只使用空间信息和法线信息。算法大致可以分成两个部分:
- 基于超体聚类的过分割。
- 在超体聚类的基础上再聚类。
算法理论
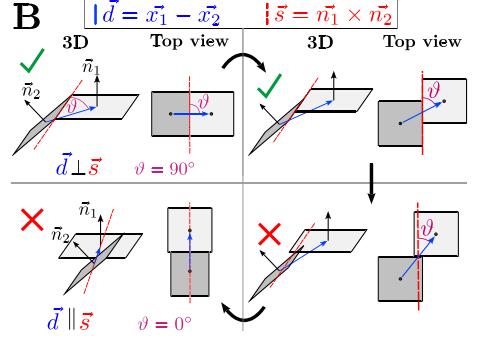
点云完成超体聚类之后,对于过分割的点云需要计算不同的块之间凹凸关系。凹凸关系通过 CC(Extended Convexity Criterion) 和**SC (Sanity criterion)**判据来进行判断。其中 CC 利用相邻两片中心连线向量与法向量夹角来判断两片是凹是凸。显然,如果图中a1>a2则为凹,反之则为凸。
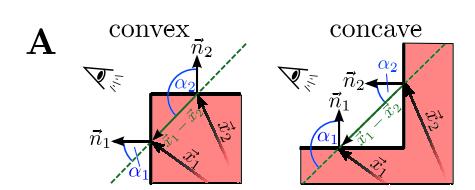
考虑到测量噪声等因素,需要在实际使用过程中引入门限值(a1需要比a2大出一定量)来滤出较小的凹凸误判。此外,为去除一些小噪声引起的误判,还需要引入“第三方验证”,如果某块和相邻两块都相交,则其凹凸关系必相同。CC 判据最终如:

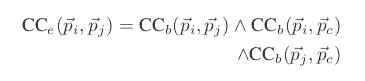
如果相邻两面中,有一个面是单独的,cc判据是无法将其分开的。举个简单的例子,两本厚度不同的书并排放置,视觉算法应该将两本书分割开。如果是台阶,则视觉算法应该将台阶作为一个整体。本质上就是因为厚度不同的书存在surface-singularities。为此需要引入SC判据,来对此进行区分。

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
5670859179)]
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 1041
1041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









