







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
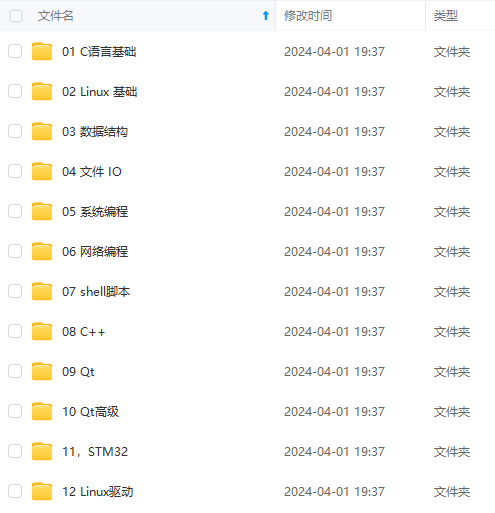
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
没有安装WiringPi的读者,可先阅读往期文章,搭建好环境。
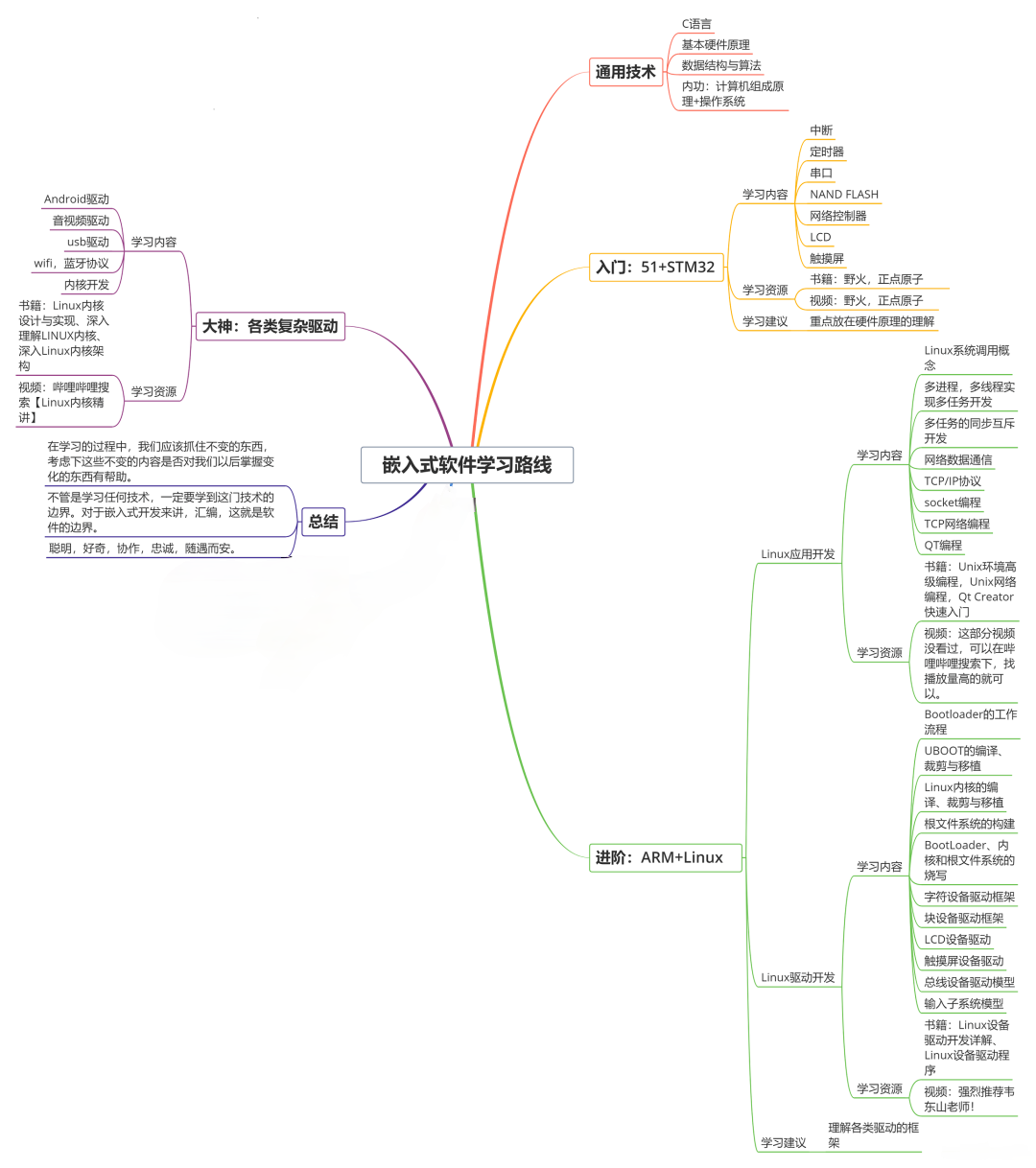
本文将介绍如何在树莓派4B上控制舵机运转,比如控制角度、方向等,带你入门模拟舵机。
准备工作:
- SG90(或其他型号)模拟舵机
- 树莓派4B
- 面包板及若干导线
舵机简介
模拟舵机与数字舵机
数字舵机(Digital Servo)和模拟舵机(Analog Servo)在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟舵机的最大区别则体现在控制电路上,数字舵机的控制电路比模拟舵机的多了微处理器和晶振。模拟舵机一般通过PWM波来控制,采用并行通信,会占用较多的IO口。数字舵机是多是采用串行通信,通过指令以总线的形式控制,常见接口有UART、RS485等,比PWM波控制方式高端一点。多个数字舵机可以串连接线,每个舵机都有唯一的ID,只需将靠近控制器的舵机连到控制器上,就能控制所有舵机,占用IO口比较少。
模拟舵机是直流伺服电机控制器芯片,一般只能接收 50Hz 频率(周期 20ms)~300Hz 左右的 PWM外部控制信号,太高的频率可能就无法正常工作了。数字舵机通过MCU可以接收比 50Hz 频率更高的 PWM 外部控制信号。
模拟舵机的控制
舵机的频率一般为频率为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围。来控制舵机不同的转角。以笔者购买的180度SG90小舵机为例,假定1.5ms的脉冲宽度为舵机的0角度,那么对应的控制关系如下:
占空比与角度位置表
| 高电平持续时间(ms) | 占空比(周期20ms) | 舵机转过的角度(度) |
|---|
当然,读者也可以根据自己的需要,规定0.5ms的脉冲宽度为舵机的0度位置,2.5ms脉冲宽度为舵机的180度位置。
SG90模拟舵机实物图
拆解图:
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。

需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人**
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









