







一,RCS的介绍
RCS系统(Robot Control System,机器人控制系统)是其智能仓储及物流自动化解决方案中的核心软件平台,主要用于调度和管理仓储机器人(如AGV、AMR等),实现高效、智能的仓储物流自动化作业。
核心功能
-
任务调度
-
接收上层系统(如WMS/WCS)指令,动态分配任务给机器人,优化作业流程。
-
支持多机器人协同工作,避免碰撞和拥堵。
-
-
路径规划
-
基于实时环境动态规划最优路径,适应复杂场景(如动态障碍物、多楼层)。
-
支持多种导航方式(二维码、SLAM激光导航等)。
-
-
设备管理
-
实时监控机器人状态(电量、位置、任务进度等)。
-
支持设备故障预警和远程维护。
-
-
系统集成
-
与仓储管理系统(WMS)、仓库控制系统(WCS)无缝对接,形成完整的智能仓储生态。
-
提供标准化API,支持第三方系统接入。
-
二.任务调度基础任务发布教程介绍
登录进入RCS系统后,点击平台下的RCS

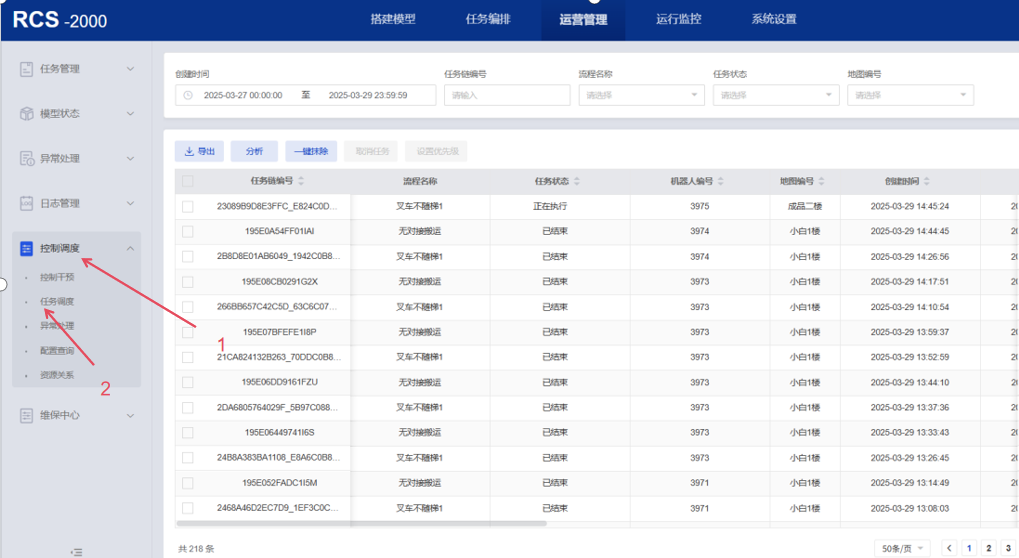
进入机器人控制系统在点击运营管理

进入RCS页面找到任务调度
1.站点绑定货架或解除货架
载具种类:指机器人搬运的载具(货架,托盘,物料箱等)。
载具类型:指机器人搬运的载具型号。
如下图202为我个人自定义的九字形托盘的别名(编号)。

2.基础任务的发布
任务类型:指任务模板的类型(如点到点不记货架搬运 无对接搬运 点到点或点到巷道搬运)
优先级:指任务执行的循序设置越小权限越大越先执行(非必填,可不填)
AMR:指机器人(如下图将莫个任务指定3973这个机器人去执行)
![]()
类型:指地图上的某个点位或某块区域(站点 巷道 区域 外设等)
值:指地图上的某个点位或某块区域的坐标编号或自定义编号或名称
如下图:FJ为自定义名称(无对接搬运模板)指定机器人将坐标编号为0056583BB0004227站点的货物搬到自定义编号为10001的巷道内。

3.注意事项
发布搬运任务时
起点:需有载具(货架,托盘等),没有需绑定(1.站点绑定货架或解除货架)注意巷道绑定货架需打开刷地图,绑定完成后需关闭刷地图否则机器人无法进入放下货架。
终点:相反,不可有载具,刷地图的开与关不影响载具的解绑。
站点:载具类型要与巷道一值(巷道载具类型203川字托盘,站点202九字托盘,载具类型不一值任务无法发布)。
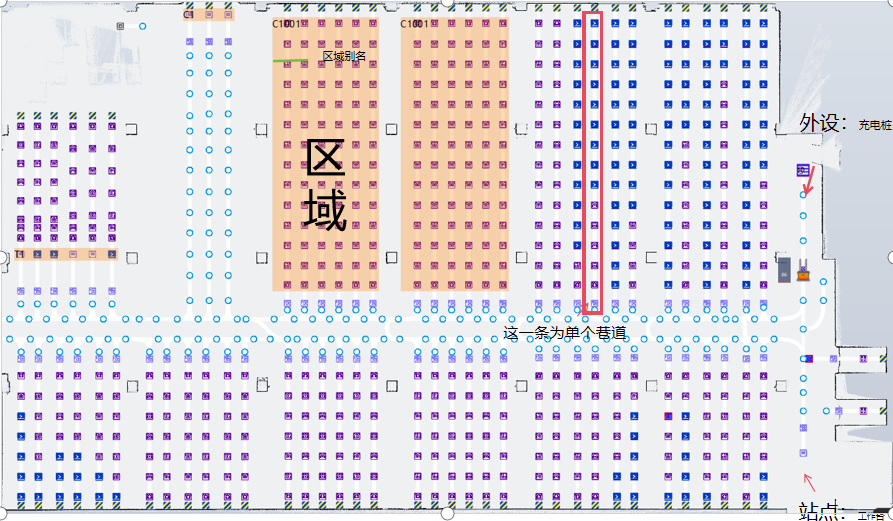
三,站点 .巷道.区域的基础区分与识别..
1.站点
(最小单位,每一个单独的点可叫做站点都有各自的坐标值)
-
定义:站点是仓库中机器人需要到达、停留或执行操作的固定位置(如货架存放点、充电桩、分拣台、工作站等)。
-
作用:
-
任务目标:机器人根据调度指令移动到指定站点完成操作(如取货、卸货、充电)。
-
路径锚点:RCS系统通过站点之间的路径规划,形成机器人运行网络。
-
状态管理:站点关联机器人任务状态(例如“任务完成”“等待指令”)。
-
2.巷道
-
定义:
巷道是仓库地图中预先定义的单向或双向通行区域,通常位于货架、工作站或其他设备之间,为机器人提供标准化的移动路径。 -
核心作用:
-
路径约束:限制机器人按规划路线行驶,避免随机穿行导致的碰撞或拥堵。
-
效率优化:通过固定巷道布局,缩短机器人寻径时间,提升任务执行效率。
-
交通管理:支持设置巷道的通行规则(如单向/双向、优先级),协调多机器人协同作业。
-
3.区域
-
定义:
区域是仓库地图中人为划定的空间范围(如矩形或多边形范围),通常对应特定功能模块或管理规则。例如:存储区、分拣区、充电区、禁行区等。 -
核心作用:
-
任务分区管理:限制机器人仅在指定区域内执行任务(如“A区只处理家电类订单”)。
-
交通控制:通过区域划分避免多类型机器人混行冲突(如人工作业区限制AMR进入)。
-
安全管控:设置危险区域(如机械臂作业区)禁止机器人通行。
-
资源优化:动态分配区域资源(如高峰期临时扩展分拣区容量)。
-

















 3380
3380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









