







这是我在参与AGV调度系统开发工作中形成的一些认识,是我的个人观点,想到什么写到什么。我自己也在学习,有不同观点可以一起讨论,文章内容仅供参考。
AGV调度系统,一般也叫RCS系统(下称RCS),主要是进行AGV车辆调度的系统,RCS需要根据上层系统提交的任务订单,对任务进行拆分、规划、配车和下发并处理任务执行过程中出现的场景交互和交管问题。其核心在于调度车辆时的交通管制模块,这也是目前业内面临的最难处理的问题。除车辆交通管制外,一般还会有车辆模块、规划模块、任务模块、接口模块、场景模块、库位模块和自动策略模块(自动待命与自动充电等)。
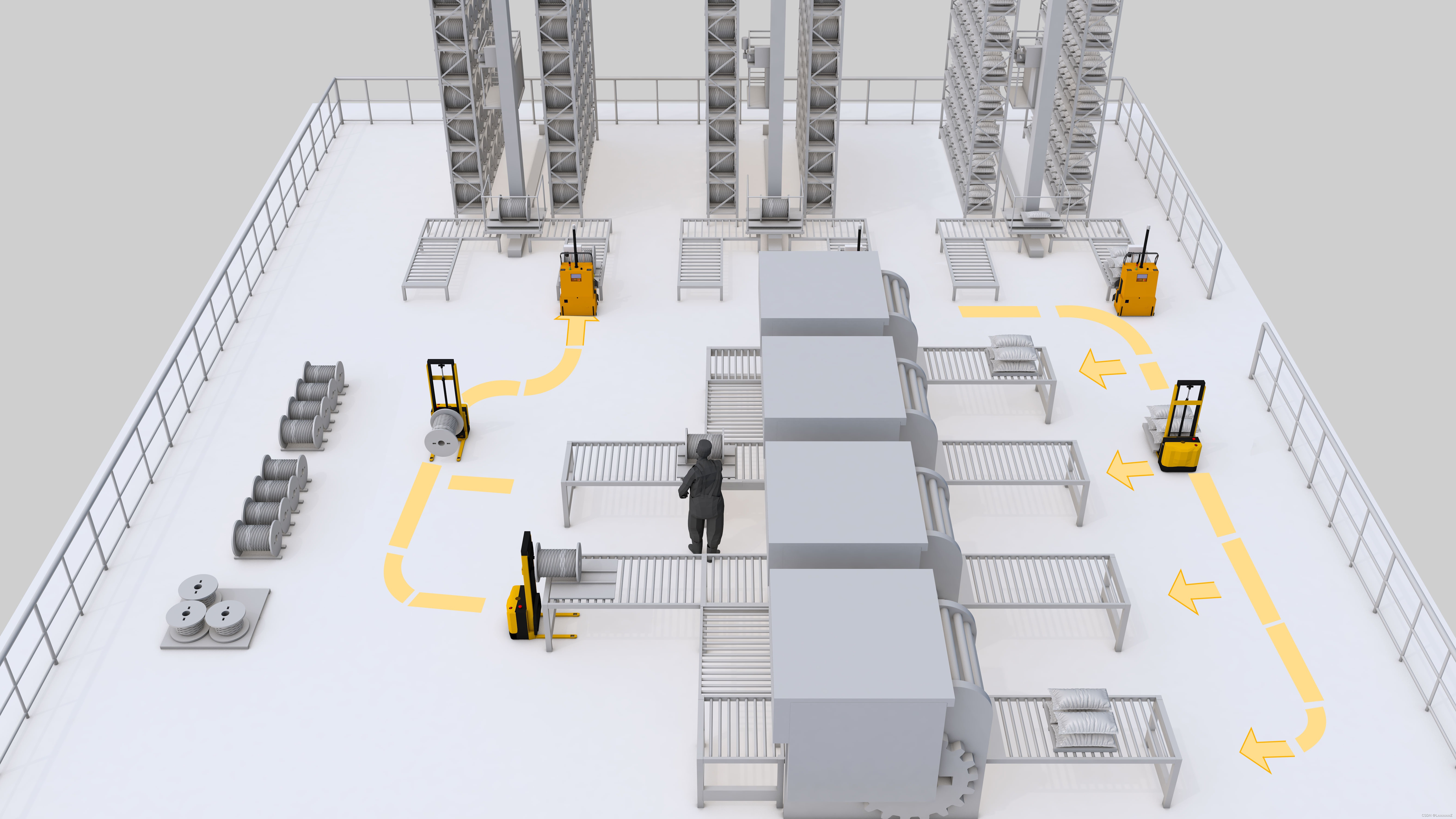
图来自网络,侵删
目前各家的RCS大差不差,用的东西和有的东西都差不多。在交管算法上没有突破之前,其实各家的技术壁垒并不高,更多是比拼运营、实施经验和品控(包括RCS系统本身的稳定性)等因素。目前RCS所追求的核心方向是调度的车辆车型更多、适用的场景更全面、项目的部署更高效、任务的分配更合理(更快代价更小)和多车调度不出现拥堵(出现拥堵快速解困)。
在应用场景上面,RCS面临的主要是仓储业务(库-库)、存取业务(库-人)和生产业务(制程-制程),这些业务的不同通常影响的不是任务模块,更多的是其交通管制模块,不同的业务,其采取交管策略可能会有所不同。但是交管模块追求的就是统一所有的场景,或者使得不同的场景表现给实施维护人员相同的操作,尽可能降低对实施人员的要求。而交管的优化通常离不开地图编辑器(地图生成器)的优化。
RCS通常会与地图编辑器以及仿真系统(包括车辆、任务和场景的仿真)一起出现,并且RCS是依赖于地图编辑器的,而仿真系统一般有车辆仿真就可以先用着了(通常不会直接上真车)。
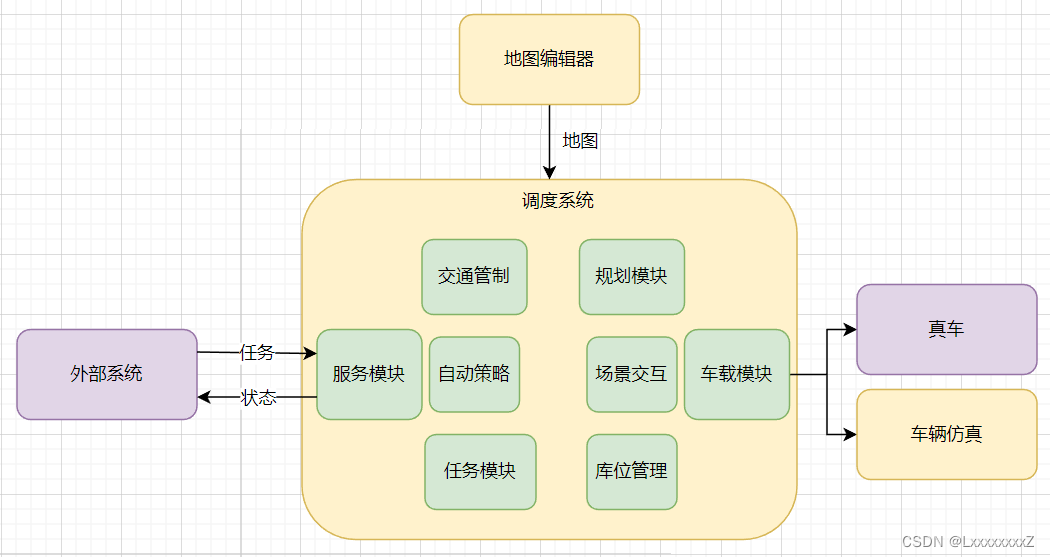
RCS通常作为服务端处于整体系统的中间层,它的下层是车辆,通常在架构上调度系统不会因为车型的不同导致太大的区别,多数适配工作会被隔离在车辆模块的适配层,在车辆模块的调度业务层面就基本不会因为车型的不同出现分离。除非部分业务差别太大导致车辆的任务分配业出现差异,如四向穿梭车和一般的其他AGV车型差别就比较大,但是这部分的差异也会被隔离在车辆模块,不会再传递到其他模块。
而RCS的上层通常是后台管理、WMS或者MES系统之类的系统。RCS可以直接对外部客户,也可以不直接对外部客户。不对外的RCS通常会增加一层定制化开发比较多的中间层,以适配各种客户千奇百怪的内部系统。这个时候RCS的接口层就可以不用太多设计工作。而如果直接对外,那么就要兼容各种协议并需要完善的接口文档,接口层设计上也要花些心思,尽量各种不同的协议最后都路由到同一套接口实现上。

















 830
830

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









