







常用相机品牌:海康威视、大华、巴斯勒、Cognex
常用镜头:FA镜头 海康 、OPT、vs、Computar
远心镜头:视清、灿锐
常用光源:OPT、嘉励
扫码枪: 基恩士、得力捷、Cognex、
相机选型
工业相机
简介:
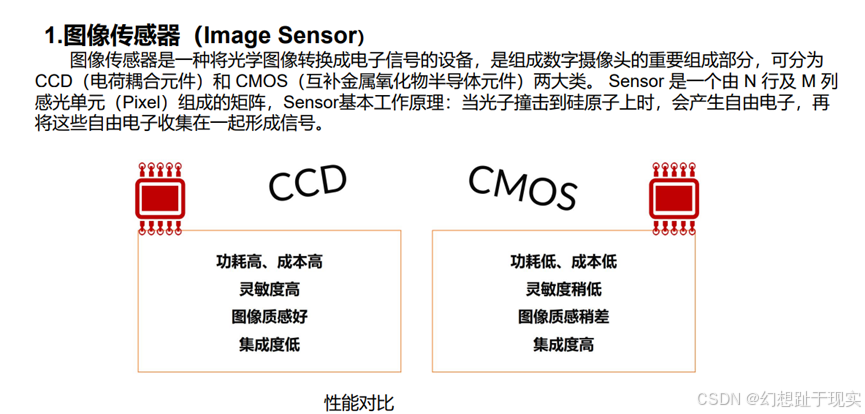
工业相机(俗称:工业摄像机)是机器视觉系统的重要组成部分,其最本质的功能就是通过CCD或CMOS成像传感器将镜头产生的光信号转变为有序的电信号,并将这些信息通过相应接口传送到计算机主机。
CCD和CMOS分别是什么
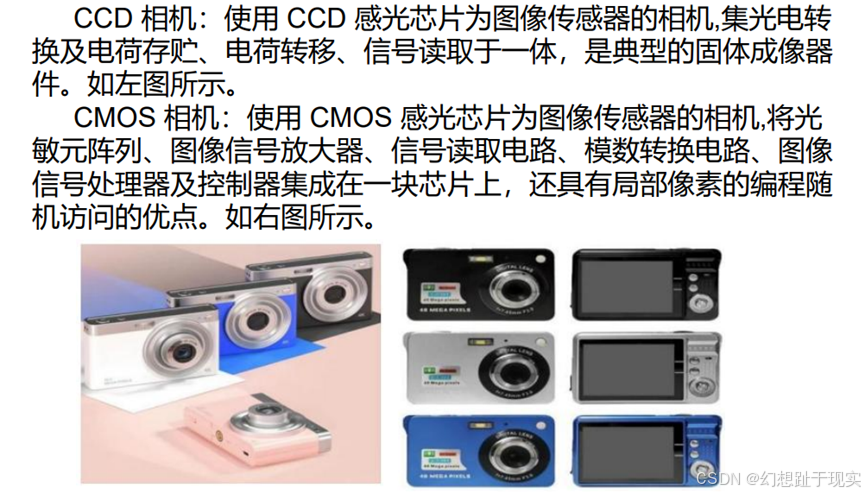
CCD称为电荷耦合器件,英文全称是“Charge-coupledDevice”
它集光电转换及电荷存储、电荷转移、信号读取于一体,是固体成像器件。其突出的特点是以电荷作为信号,而不同于其它器件是以电流或者电压为信号。
CMOS称为互补金属氧化物半导体,英文全称是"Compementary MetalOxide Semiconductor"
它可将光敏元件、放大器、A/D转换器,存储器、数字信号处理器和计算机接口电路集成在一块硅片上。其突出的特点是将半导体产生的电子直接转换成电压信号。
- 相关资料: CCD和CMOS分别是什么,有哪些区别?
-
工业相机与普通相机的区别:
 工业相机分类
工业相机分类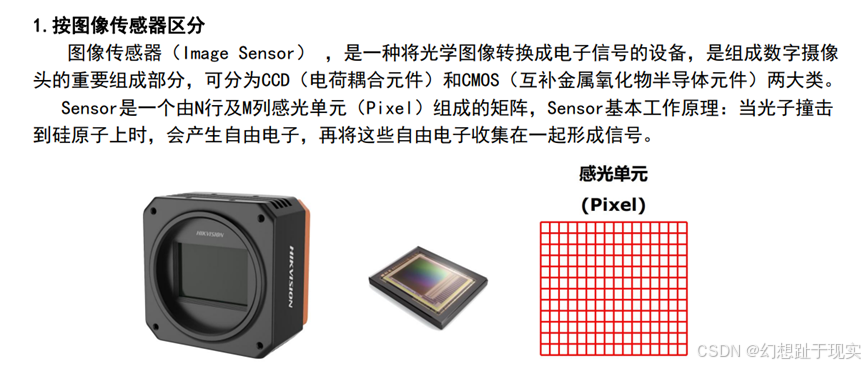



图像参数:
黑白图像
像素(Pixel):
组成图像的最小单元。
拓展:像素定义,简单的说,就是CCD/COMS上光电感应元件的数量,一个感光元件经过感光、光电信号转换、A/D转换等步骤后,在输出的图片上就形成了一个点,这些点就是构成影像的最小单位“像素”(Pixel)。
-
像素分辨率:
每英寸储存的像素数
像素深度:
存储每个像素所用的数据位数。常用:8bit、10bit、12bit、16bit
灰度
色阶/灰阶,亮暗程度,数值越大,越明亮,黑色为0 白色为255
彩色图像
颜色模型:
RGB(红色、绿色、蓝色)
HSB(色度、饱和度、亮度)
CMYK(青色、洋红色、黄色、黑色)
Lab (亮度、从洋红色到绿色的范围,从黄色到蓝色的范围)
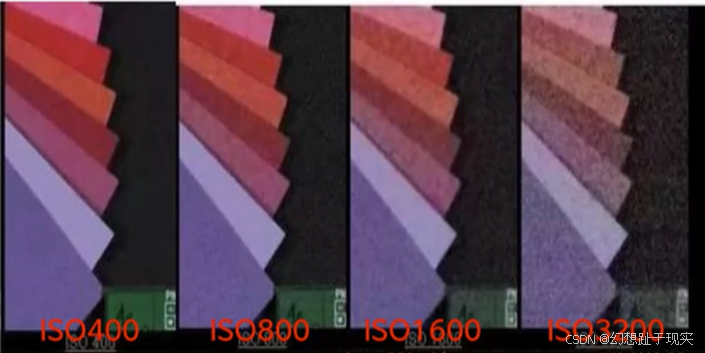
图像噪点:
图片中不必要的干扰信息,形成原因可能就是感光面积小,转换成电信号的效率比较低
工业相机主要参数:

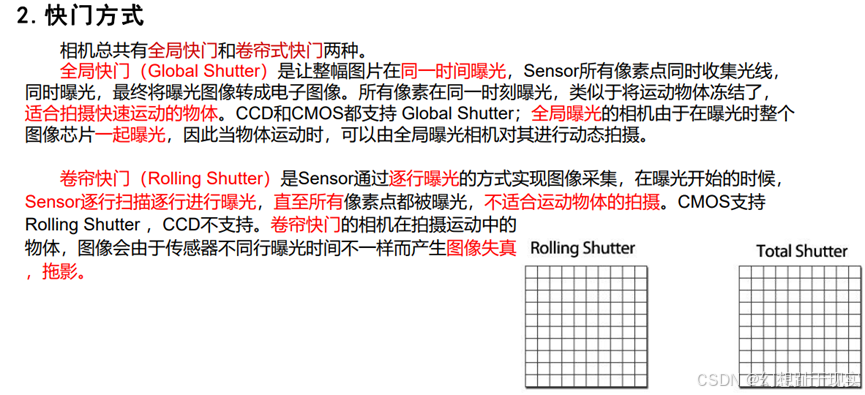

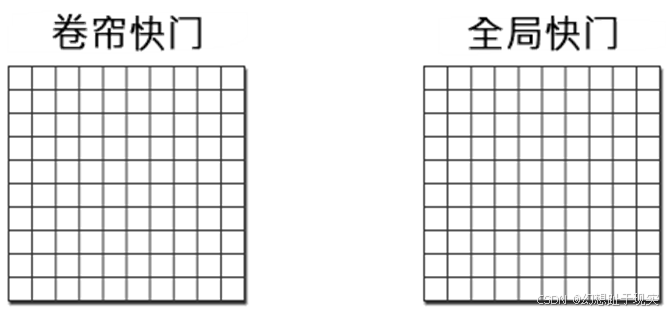
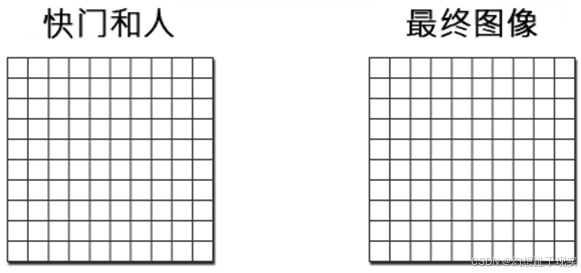
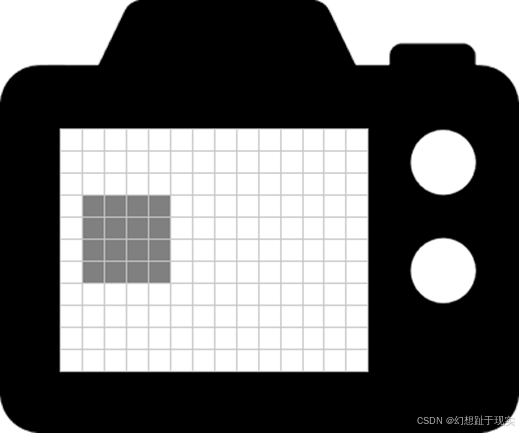
全局快门: 在曝光开始的时候,传感器开始收集光线;在曝光结束的时候,光线收集电路被切断,传感器读出值即为一副图片,特点:传感器上所有像素同时刻曝光
卷帘快门: 通过通断电控制传感器,使其不同部分在不同时间下对光的敏感度不同。逐行进行曝光,直至所有像素点都被曝光。
-
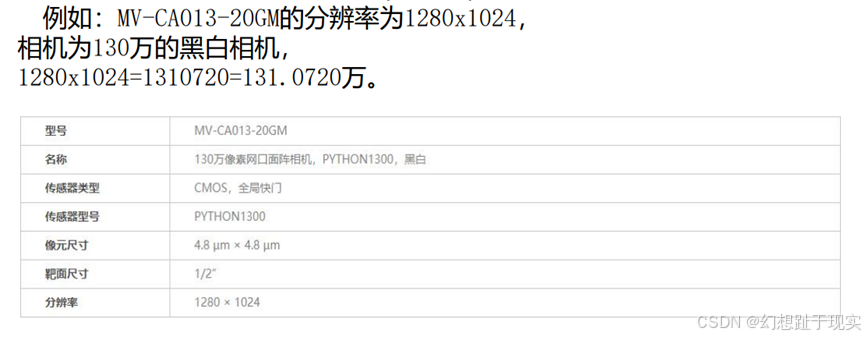
像元尺寸
像元尺寸即一个像元的大小。像元大小和像元数(分辨率)共同决定了相机靶面的大小。
像元是反映影像特征的重要标志。是同时具有空间特征和波谱特征的数据元
几何意义是其数据值确定所代表的地面面积。物理意义是其波谱变量代表该像
元内在某一特定波段中波谱响应的强度。即同一像元内的地物,只有一个共同
灰度值。像元大小决定了数字影像的影像分辨率和信息量。像元小,影像分辨
率高,信息量大;反之,影像分辨率低,信息量小
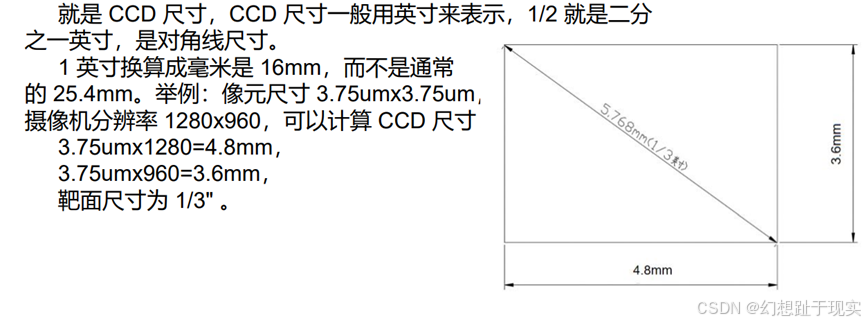
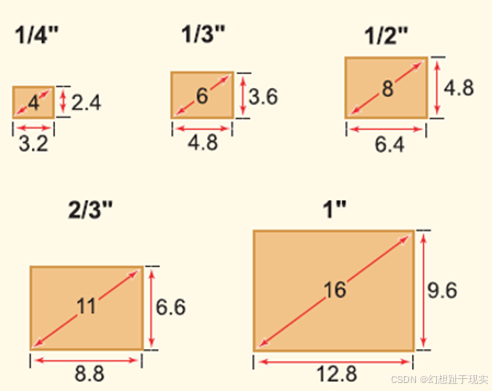
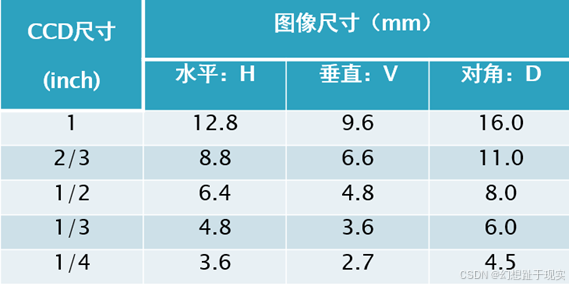
靶面尺寸
1英寸——靶面尺寸为宽 12.8mm高 9.6mm对角线16mm
2/3英寸——靶面尺寸为宽8.8mm高6.6mm,对角线11mm。
1/2英寸——靶面尺寸为宽6.4mm高4.8mm,对角线8mm。
1/3英寸——靶面尺寸为宽4.8mm高3.6mm,对角线6mm。
1/4英寸——靶面尺寸为宽3.2mm*高2.4mm,对角线4mm。
分辨率
像素点按照矩阵的方式进行排列
面阵相机:水平方向*垂直方向的像素数
-

 在同等尺寸下,分辨率的增大,可以增大图像的清晰度
在同等尺寸下,分辨率的增大,可以增大图像的清晰度 -
帧率/行频
帧率描述芯片可在每秒钟拍摄与传输的图像数量。
帧率越高,也就是说每秒能够拍摄更多图像,传输更高的数据量
对于面阵相机一般为每秒采集的帧数(Frames/Sec.);对于线阵相机为每秒采集的行数(Hz)。
-

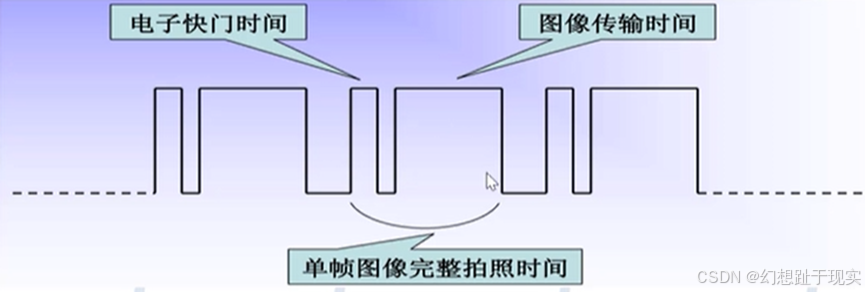 电子快门时间可由用户自己设置,但是相机传输速率即帧率是固定的。因此,帧率是相机成像速度的“瓶颈”。例如电子快门速度可达1/1000s,但成像却只能60帧/秒。
电子快门时间可由用户自己设置,但是相机传输速率即帧率是固定的。因此,帧率是相机成像速度的“瓶颈”。例如电子快门速度可达1/1000s,但成像却只能60帧/秒。 -
芯片/传感器
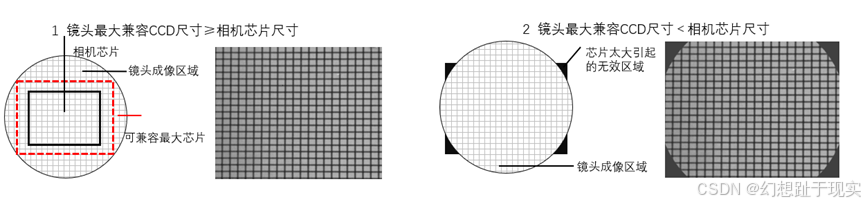
工业上,一般常用的传感器尺寸有如下几种,尺寸大小各不相同。在相素不变的情况下,相机传感器尺寸越大,噪点控制能力越强,因为单个感光元件之间的间距越大,相互之间的信号干扰越小。
-
相机传感器尺寸和镜头的匹配的使用技巧:在选用相机和镜头时,一般遵循“镜头最大兼容CCD尺寸>=相机芯片尺寸”的原则。
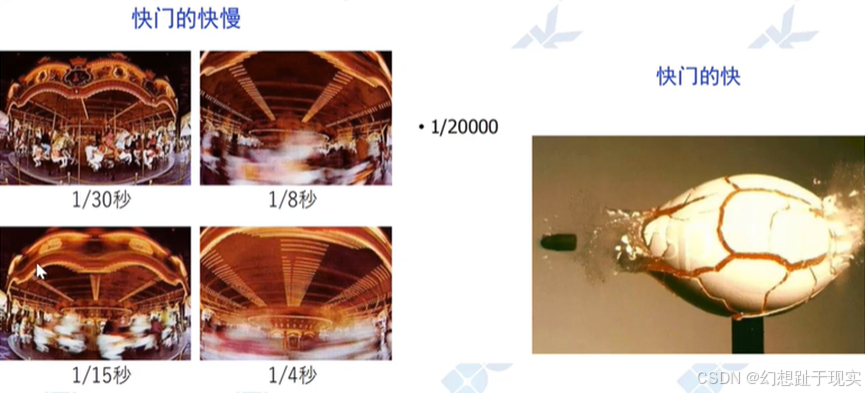
曝光
指相机感光元件,接收外界光线,再形成图像的过程,影响曝光的因素有三个,分别是:感光度,快门,光圈
-
感光度(ISO):
衡量对光的灵敏程度
-

 数据接口
数据接口

USB接口
接口是4芯,其中2根为电源线、2根为信号线,接口体积小,可热拔插,可真正实现即插即用,适合传送多媒体数据的传送模式,连接方便。
USB 2.0向下兼容USB 1.1、USB 1.0,数据的传输率可以达到 120Mbps~480Mbps。
传输距离短,0.6米
USB3.0传输带宽高达5.0Gbps传输640Mbps
-
USB接口
接口是4芯,其中2根为电源线、2根为信号线,接口体积小,可热拔插,可真正实现即插即用,适合传送多媒体数据的传送模式,连接方便。
USB 2.0向下兼容USB 1.1、USB 1.0,数据的传输率可以达到 120Mbps~480Mbps。
传输距离短,0.6米
USB3.0传输带宽高达5.0Gbps传输640Mbps
-
1394接口
两种接口标准,一种是6针接口,另一种是4针接口。6针接口可以从端口获得电源,以给那些无法自己供电的产品提供电源。
1394A传输速率为400Mb/s,1394B
可达800Mb/s
不需要控制器,可以实现对等传输,最大连线4.5米,大于4.5米可采用 中继设备。
支持即插即用
-
GigE接口
带宽可达到1000 Mbps,图像可以无损失实时传输,最远可传输100米。
标准的网络连接器,电缆线成本低。
带宽易于升级,包括10M,100M,1000M 等,在工业机器视觉中被广泛应用
CameraLink接口
13对线(其中有6线对数据线),使得接插件的尺寸更加的小巧。允许相机设计的体积更小。
更高的传输速率。采用Channel Link芯片组( 支持速率达 2.3Gb/s )满足对数据传输速率越来越高的要求。
集成有串口通讯协议。
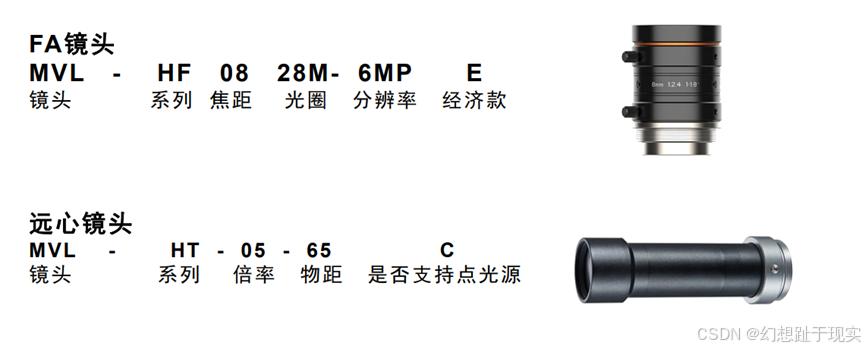
型号的含义:
-



相机选型
工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
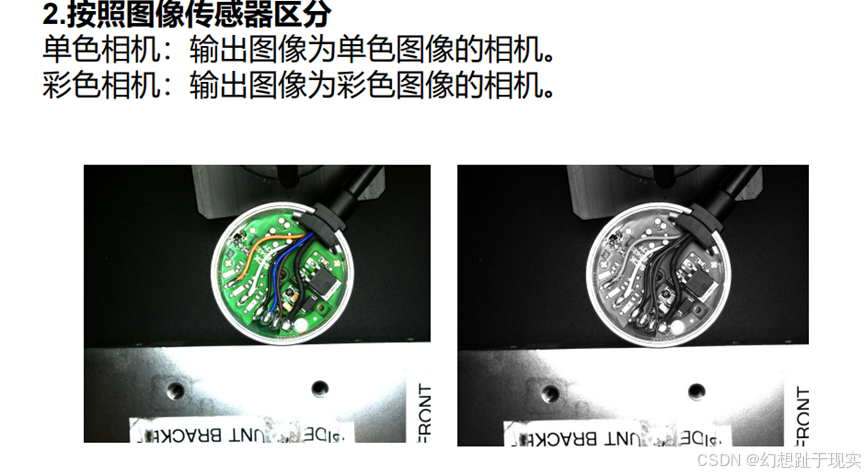
1.确定黑白/彩色:
如果对颜色有检测需求(如线序颜色检测)或检测只能通过颜色判断需选择彩色,否则一般情况均选择黑白相机。
2.确定卷帘/全局快门
如果实际检测为动态,即产品在运动过程中拍照检测(飞拍)(如传送带上料),则需要选择全局快门的相机;
如果实际检测为静态,即产品在静态时拍照检测(如人工摆放到固定位置进行检测),则可以选择卷帘快门的相机。
3.确定分辨率大小:
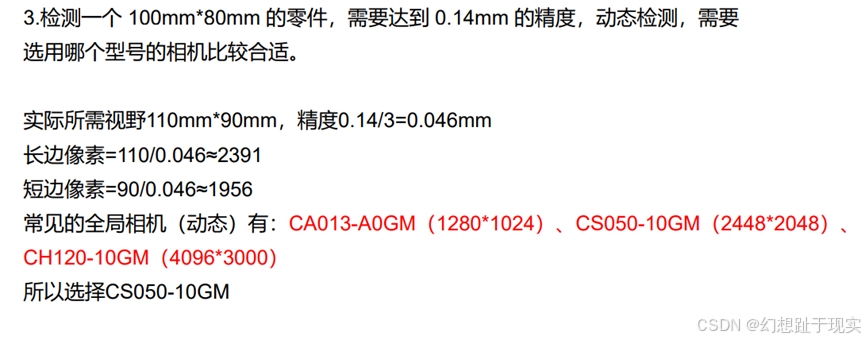
(1)产品检测需求为尺寸或者定位,有精度要求,可通过精度与检测视野面积进行计算得出需要的分辨率
(2)如果产品无精度要求,则优先可以考虑低像素的相机,如果成像或测试时,被测部分模糊不清楚需要高分辨率的相机来提高成像,则再旋转高分辨率的相机
4、确定帧率
一般高速的动态检测速度可达到一秒10个以上,针对此种检测需求可以选择高帧率的相机(相机帧率为60fps表示1秒可以拍60张),一般情况下像素越低率越高。
分辨率计算
定位、测量用3倍精度,被测物尺寸要加入视场冗余尺寸,每个方向至少加5mm。
实际应用举例:被测工件尺寸20mm*40mm,要求检测精度0.1mm,动态定位,计算应该选用多少分辨率的相机?
相机选型:算法判断需要3*单像素精度,单像素精度要求=0.1mm/3=0.03mm;分辨率要求:20+5+5mm/0.03mm=1000,40+5+5mm/0.03mm=1666 分辨率要求大于1666*1000 且全局相机,可选择:1920*1200分辨率,选择相机:200万,2/3”靶面。
精度:检测值与真实值的差别
公差:工件大小允许的变动量
像素精度:单个像素所占的物理尺寸
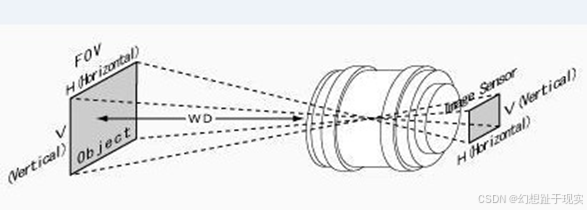
视野FOV/视场/视场角: 相机所能看到的现实世界的物理尺寸,视觉检测时要确保检测产品在相机视野范围内。视野大小和镜头焦距及工作距离相关。在相同焦距的镜头时,工作距离越远,视野越大;在相同工作距离时,焦距越小,视野越大。根据检测产品大小进行确定视野。
 示例一
示例一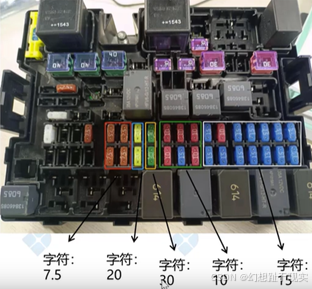
产品情况:
检测汽车电容器方框内的零件是否有
漏装,错装,装反
区域大小:
检测区域为110mmx27mm;
细节尺寸:
所需检测产品字符细节尺寸为0.5mm
示例二

产品情况:普通带螺纹工件,放在固定机械内同方向流过,速度:10件/秒,需要测量产品长度
区域大小:18mm*10mm
公差:±0.05mm
-
示例三:
-
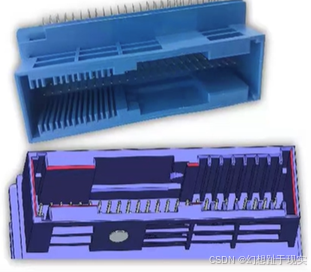
产品情况:长边为75mm的连接器,来料方向基本不变,测量两PIN针之间的距离;
区域大小:PIN针所在区域为67mm*8mm;
公差:两PIN针之间距离允许上下变化的公差±0.5mm
-
示例四:
拍摄场景:
飞拍(运动拍照),精准的体现出了全局曝光 的优势
曝光方式: 全局曝光、考虑不产生拖影
计算公式:
曝光时间内,移动距离不超过一个像元尺寸
理论曝光时间Tmax=S像/V像
运动拍摄相机选型案例
产品运动速度为200mm/s,视觉精度为0.015mm,视野大小30mm * 20mm,6pc/s,相机该如何选择?
相机分辨率 = (30/0.015)*(20/0.015)=266.6万像素
每秒6pcs产品,相机帧率要大于6帧;
运动拍摄,理论曝光时间T<0.015/200=75us
综上,可选择320万(2048*1536)全局相机
-
计算公式总结:
- 视觉精度 = 公差大小 / 10或者5或者3
- 单边分辨率 = 视野的大小或产品尺寸(长或宽)/ 视觉精度(像素)/ 2(亚像素)
- 选择的像素=单边分辨率(长)* 单边分辨率(宽)
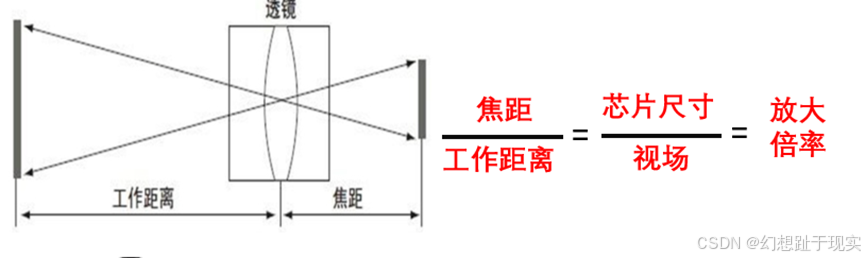
- 焦距(f)=工作距离(镜头到目标的距离 WD)* 芯片尺寸( CCD靶面型号的尺寸)/ 视场大小或者物体高度(FOV)
- 光学放大倍数 = 芯片尺寸( CCD靶面型号的尺寸)/ 视场大小或者物体高度(FOV)
- 系统放大倍率 = 芯片短边( CCD靶面型号的尺寸)/ 视野短边
- 工作距离(WD)=焦距(f)* 芯片尺寸( CCD靶面型号的尺寸) / 视场大小或者物体高度(FOV)
- 工作距离(WD)=焦距(f)/ 倍率
- 视场大小或者物体高度(FOV)=工作距离(WD)* 芯片尺寸( CCD靶面型号的尺寸)/ 焦距(f)
- 芯片尺寸(CCD靶面型号的尺寸) = 像元尺寸(长或宽)* 单边分辨率(长或宽)/ 1000(转mm)
- 工作高度 = 焦距 / 倍率
镜头选型
简介
主要用于将目标成像在图像传感器的光敏面上,它们在机器视觉系统中扮演着核心角色。这些镜头专门应用于工业制造,具有高鲁棒性和广泛的广角视野,能在极端的工作环境下稳定工作。工业镜头的成像效果比普通镜头更清晰,并且具有抗干涉和抗冲击的特性,适合在工业生产的恶劣环境中使用。
镜头的基本功能:就是实现光束变换(调制),镜头的质量直影响到机器视觉
系统的整体性能,合理地选择和安装镜头,是机器视觉系统设计的重要环节。
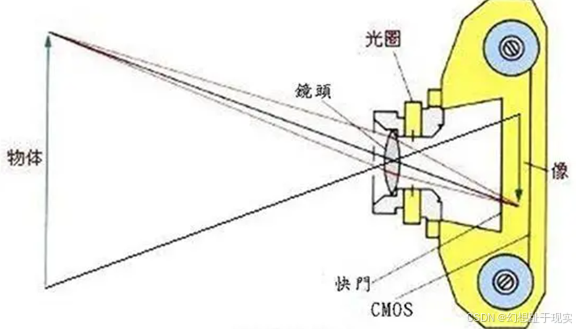
镜头的成像原理:
 镜头的成像原理基本和透镜一样
镜头的成像原理基本和透镜一样
 相机+镜头:照射在物体上的光经过漫反射通过凸透镜将物体的像成在相机的芯片上,相机控制芯片曝光后将光信号转换成有序的电信号,最终形成物体的像。
相机+镜头:照射在物体上的光经过漫反射通过凸透镜将物体的像成在相机的芯片上,相机控制芯片曝光后将光信号转换成有序的电信号,最终形成物体的像。
镜头组成
光圈环: 控制镜头入光量的光学装置。对于已经制造好的镜头,我们不可能随便改变镜头的直径,但是我们可以通过在镜头内部加入多边形或者圆形,并且面积可变的孔状光栅来达到控制镜头通光量
聚焦环:改变成像最清晰的平面到镜头的距离,也就是说,调节对焦环来保证被摄主体是清晰的。
对视觉系统的影响:图像不清晰,难以呈现很好的图像效果,降低系统精度,直接影响到机器视觉系统的整体性能


镜头分类
按功能分类:
定焦镜头、变焦镜头、定光圈镜头
按视角分类:
普通镜头、广角镜头、远摄镜头
按焦距分类:
短焦距镜头、中焦距镜头、长焦距镜头
按用途分类:
显微镜头、远心镜头、FA镜头

远心镜头
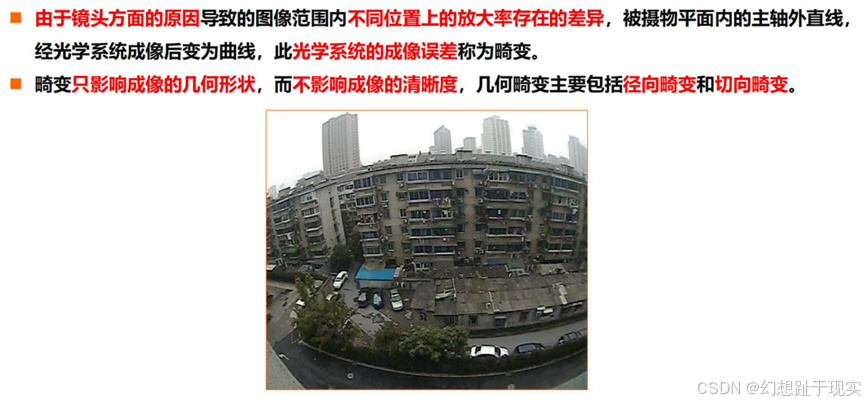
畸变
径向畸变
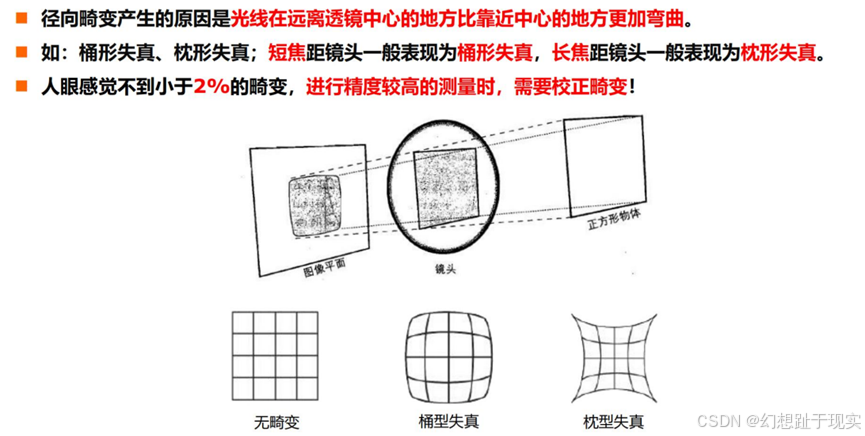
径向畸变是沿着透镜半径方向分布的畸变,产生原因是光线在远离透镜中心的地方比靠近中心的地方更加弯曲,这种畸变在普通廉价的镜头中表现更加明显,径向畸变主要包括桶形畸变和枕形畸变两种。
 远心镜头(Telecentric):主要是为纠正传统镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化,这对被测物不在同一物面上的情况是非常重要的应用。
远心镜头(Telecentric):主要是为纠正传统镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化,这对被测物不在同一物面上的情况是非常重要的应用。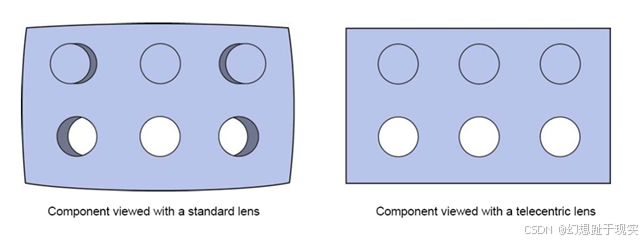
远心镜头分类
根据远心镜头分类设计原理分别为:
物方远心镜头
物方远心光路设计原理及作用:
物方主光线平行于光轴主光线的会聚中心位于像方无限远,称之为:物方远心光路。其作用为:可以消除物方由于调焦不准确带来的读数误差。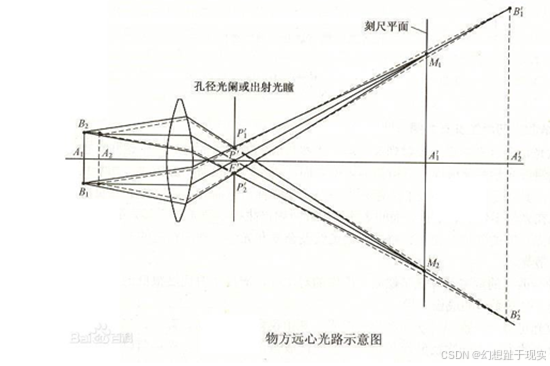
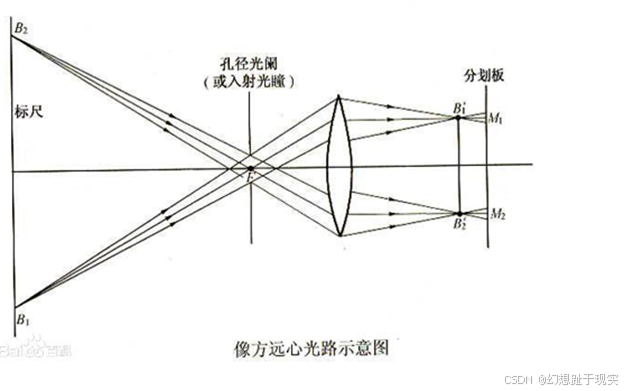
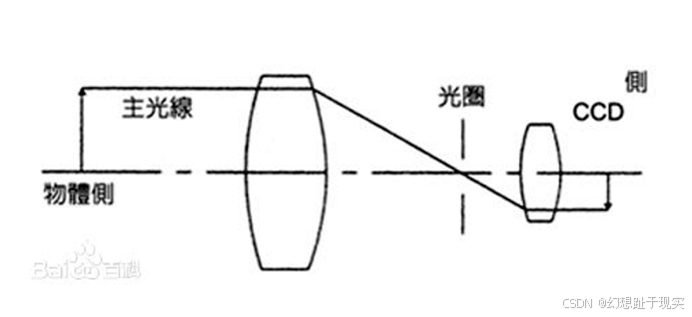
像方远心镜头
像方远心光路设计原理及作用:
像方主光线平行于光轴主光线的会聚中心位于物方无限远,称之为:像方远心
光路。其作用为:可以消除像方调焦不准引入的测量误差
两侧远心镜头
两侧远心光路设计原理及作用:
综合了物方/像方远心的双重作用。主要用于视觉测量检测领域。
远心镜头技术优势:
- 高分辨率
- 真正的远心设计,超宽景深与低畸变
- 独特的平行光路设计
 镜头选型
镜头选型
镜头选型题目
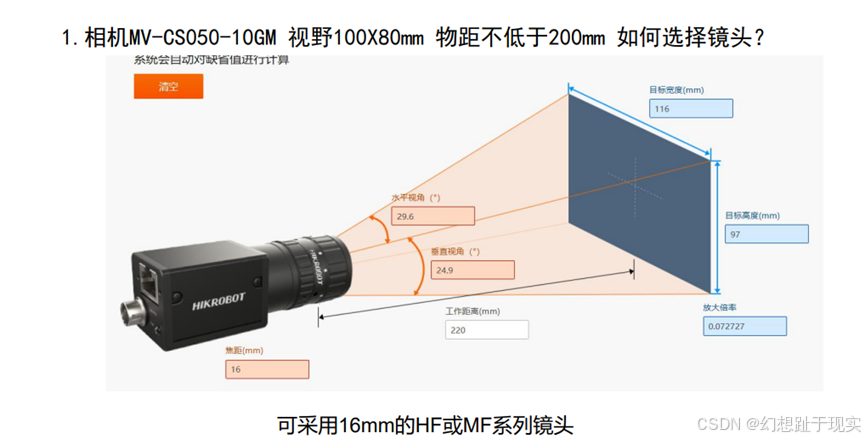
1.相机MV-CS050-60GM 视野100X80mm 物距不低于200mm 如何选择镜头?
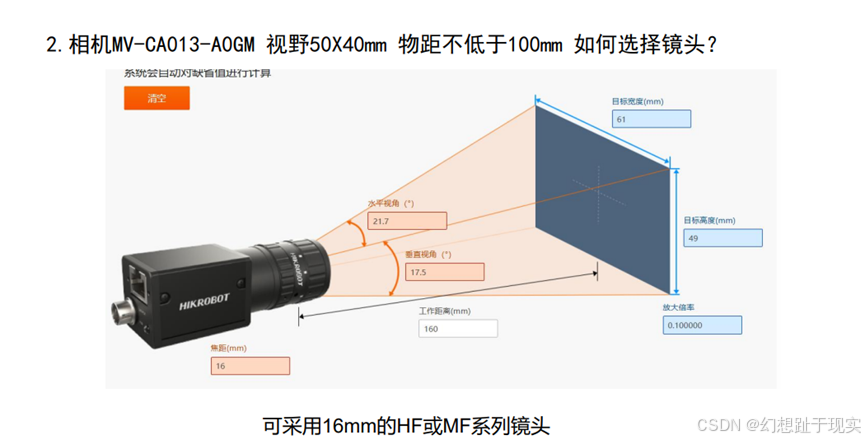
2.相机MV-CU013-A0GM 视野50X40mm 物距不低于100mm 如何选择镜头?
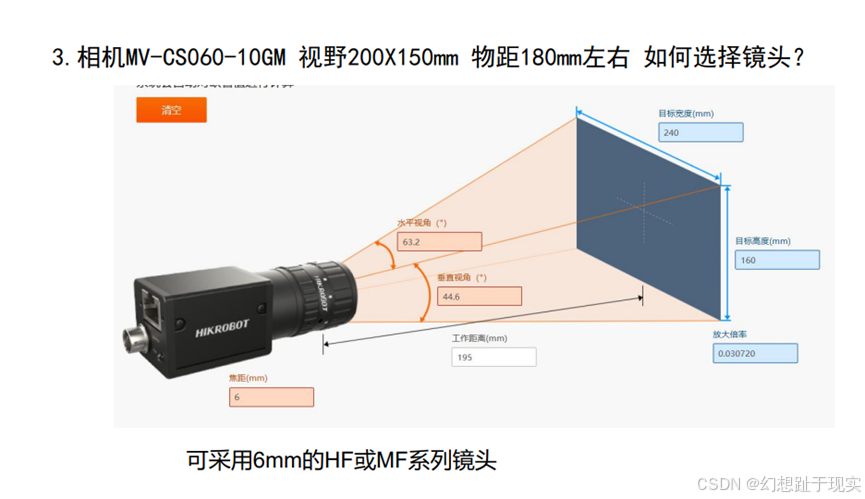
3.相机MV-CS060-10GM 视野200X150mm 物距180mm左右 如何选择镜头?
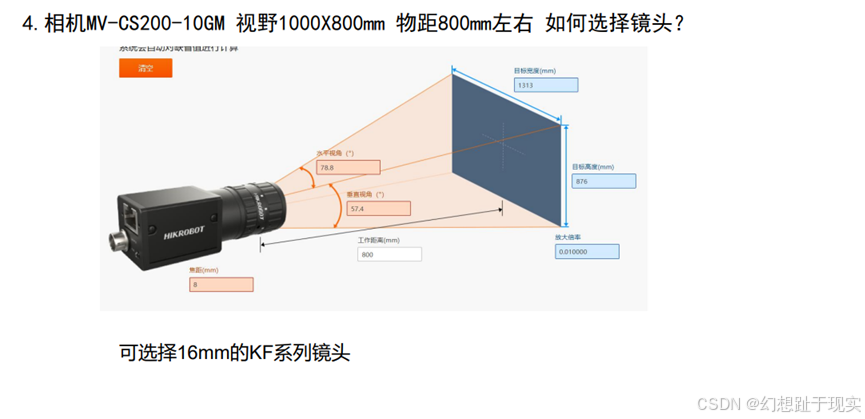
4.相机MV-CS200-10GM 视野1000X800mm 物距800mm左右 如何选择镜头?
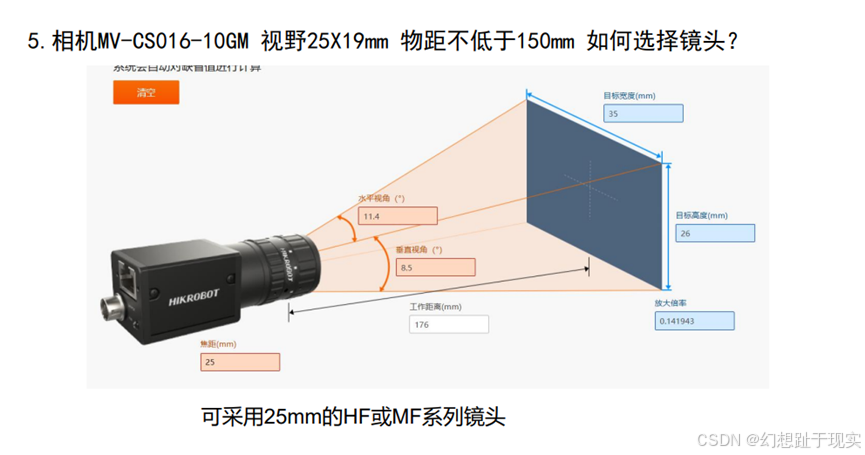
5.相机MV-CS016-10GM 视野25X19mm 物距不低于150mm 如何选择镜头?

光源选型
简介
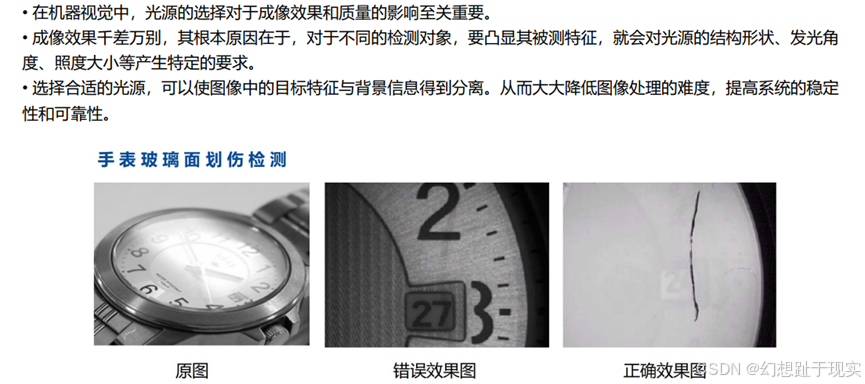
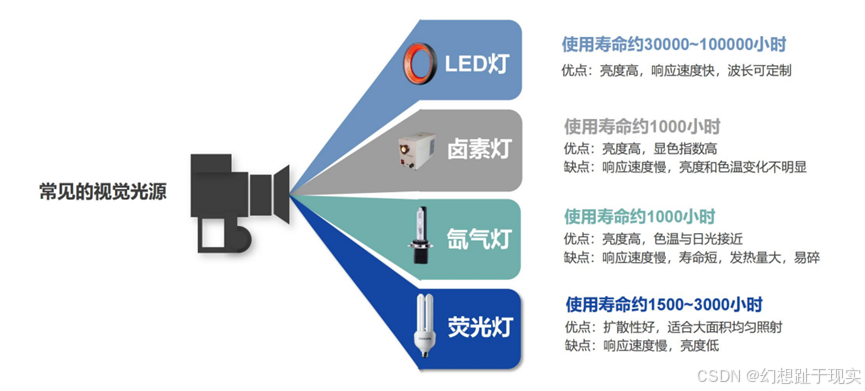
机器视觉中除了最核心的工业相机,还有一项设备对整套系统效果影响很大,那就是:光源。很多机器视觉项目失败的主要原因是图像质量不好,特征不明显。因此光源的选择也是非常重要的
光源作为辅助成像设备,是机器视觉系统的重要组成部分,它为机器视觉系统的图像获取提供足够的光线。
 为什么需要光源:
为什么需要光源:

















 5396
5396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









