






近日,上海AI Lab最新推出的HOMIE人形机器人遥操作系统引发关注,该系统以3500元的低成本硬件实现了对人类动作的1:1复刻,并通过创新的同构外骨骼设计和强化学习算法,解决了传统人形机器人动作控制的多个技术难题。且该系统已开源。
以下是关键信息梳理:
技术原理与核心组件
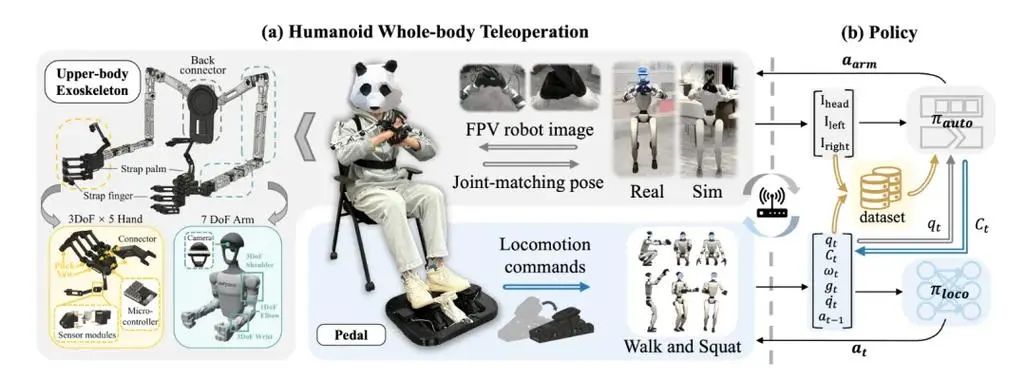
HOMIE系统基于“人机同构”理念设计,由以下三大硬件组件和强化学习框架构成:
同构机械臂外骨骼:7自由度机械臂与机器人关节一一对应,采用Dynamixel伺服电机(精度0.09°),通过URDF模型对齐坐标系,实现误差小于0.09度的动作映射,响应频率高达260Hz。
动作感应手套:每只手套,使用霍尔效应磁感技术捕捉15自由度的手指动作,适配多种灵巧手型号。
三轴脚踏板:通过“踩油门式”直觉操作控制移动速度、转向与下蹲高度。
此外,系统采用强化学习框架,创新性地引入以下技术:
上半身姿势课程学习:渐进式训练机器人平衡能力,避免动作突变导致的失衡。
高度跟踪奖励函数:优化下蹲动作的稳定性和适应性。
对称性增强技术:利用镜像样本提升训练效率和策略对称性。
性能优势与成本控制
速度与精度:相比传统VR手柄方案,HOMIE的指令采集速度提升200%,任务完成时间缩短50%,尤其在抓取物体时几乎同步响应。
低成本原因:通过同构设计避免昂贵的动作捕捉设备和复杂算法,例如使用霍尔传感器替代高成本视觉系统。
开源框架降低了开发门槛,硬件组件(如手套、踏板)通用性强,适配主流人形机器人(如Unitree G1、傅利叶GR-1)。
应用场景与市场需求
潜在落地领域
教育/娱乐:低价人形机器人适合STEM教育(编程教学)或家庭娱乐(舞蹈表演),但需配套开发工具和内容生态。
工业辅助:若精度达标,可替代部分人工进行危险环境操作(如核电站检修),但需工业级可靠性认证。
服务业:餐厅传菜、酒店引导等场景,但需解决移动灵活性与环境交互能力。
市场需求匹配度
B端市场:企业更关注投资回报率(ROI),若机器人能降低人力成本且维护费用可控,则可能快速渗透。
C端市场:3500元接近高端电子产品价格带(如iPhone),但需明确消费者需求痛点(如实用性不足可能导致“玩具化”)。

行业竞争与生态壁垒
现有竞品对比
高价标杆:波士顿动力Atlas(成本超百万美元)展示技术上限,但商业化困难。
中端产品:优必选Walker系列(售价10万+美元)主打科研与高端服务,功能全面但受众有限。
低价竞品:若3500元机器人能在关键性能(如动作精度≥90%、续航≥4小时)接近中端产品,可能形成“性价比颠覆”。
生态构建挑战
开发者生态:开放SDK/API吸引开发者扩展应用场景,决定产品生命力。
行业标准:若技术能推动动作复刻协议标准化(如统一通信接口),可能成为行业基础设施。
政策风险:人形机器人的数据安全、伦理问题可能引发监管限制(如欧盟AI法案)。
变革潜力
技术突破:实现“低成本+高可靠性”组合,且关键指标(精度、延迟)达到工业级门槛。
场景创新:挖掘未被满足的需求(如老龄化社会的护理辅助),而非替代现有成熟方案。
生态爆发:吸引开发者、企业共建应用生态,形成技术护城河。

挑战与局限
技术成熟度
目前HOMIE仍需依赖操作者的实时控制,自主决策能力较弱,与特斯拉Optimus等全自主系统相比存在差距。
硬件适配性
外骨骼需根据不同机器人手臂设计微调,可能增加定制化成本。
伦理与安全风险
大规模应用需解决数据隐私、操作失误责任归属等问题。
HOMIE以3500元的低成本实现了媲美高端设备的精准控制。这一突破不仅降低了行业准入门槛,更通过开源生态推动技术普及,为人形机器人的广泛应用奠定了基础。未来,随着技术迭代和场景扩展,人形机器人有望成为日常生活与工业生产中不可或缺的助手。

















 697
697

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









