





洪性勋等人,汉阳大学
摘要:拟人机械臂通常由一系列转动关节和连杆组成。本文利用一系列型或
型关节,根据旋转轴与相邻两个连杆之间的关系进行分类,用一种新颖的运动学表示来描述串联机械臂。它提供了一种直观的方法来描述现有机械臂的一般类型,并在设计模块化机械臂的关节和连杆模块之前获得直观的思路。在此基础上,提出了双输入一输出连接的关节模的概念。这个连接模块可以在两个连接模块之间直接耦合。此外,还介绍了关节或链路模块之间机械和电气连接的实用解决方案。两个模块之间可以通过8种45度间隔的相对位置建立连接。利用关节和连杆模块,对三种关节构型的三自由度模块化机械臂进行了有代表性的展示。装配完成后,利用关节和连杆模块的信息得到三个算例的标准D-H(Denavit-Hartenberg)参数。
1. 介绍
现有的用于工业和服务目的的机械手在与人类隔离的环境中执行预先编程的任务。这不能满足期望人机协作的用户友好安全环境日益增长的需求。此外,用户必须在面向供应商的市场确定的具有预定义规格的固定配置操纵器中选择适合某项任务的产品。对于使用这些机械手的设备系统,需要进行相对较高的价格投资。在给定的任务之外投入另一特性的任务,用户很难承受额外的费用。即使没有成本问题,为修改后的任务更改系统也不是用户友好的。为了克服机械手的安全性和用户任务可扩展性的限制,需要适合于实现以用户为中心的任务适应。模块化机械手可以解决这些面向用户的需求。
Murata将模块化机器人分为四类[1]。按照模块化分类,第1类是固定配置的模块化机器人,第2类是手动可重构的模块化机器人,第3类是自重构的模块化机器人,第4类是自复制的模块化机器人。大多数模块化机器人都是一个单元模块的同构系统,具有连接机制和自重构功能。为了使模块化机器人具有自重构功能,其移动性和连接能力是非常重要的。能够自行移动连接其他模块的移动性,以及模块间连接器自动连接和断开的连接能力[2],[3]。然而,这些功能是额外的负担模块化机械臂系统在价格和尺寸方面的额外机构。因此,不需要超过2级的模块化机械手,该机械手具有针对特定任务推荐合适配置的系统。该类的模块化机械手像组装乐高一样手动重新配置,然后识别模块的串行链连接。
Universal Robots的UR10[4]和VSA-Cube[5]分别具有采用扰动观测器算法的主动方法和采用变刚度的被动方法的安全函数。Schunk GmbH & Co. KG[6]根据功率密度,提供多种1-DoF关节模块和2- dof关节模块,紧凑型夹具和工具快速更换系统。Robotis Inc.的模块化关节[7]被广泛应用于研究和领域,因为该公司有很多模块化解决方案。这些模块的模块化设计在维护方面具有优势。串联弹性蛇形机械臂[8]由一自由度模块的串联链组成,其中相邻模块的驱动轴相互交替垂直。然而,由于这些模块是面向提供者设计的,因此组装这些模块后的操纵器几乎是固定配置。因此,它们可以被归类为1类。
RMMS[9]具有接头和链路模块,接头和链路模块具有具有该模块信息的微处理器。这些模块具有手动可重构功能,以满足第2类要求。然而,每个模块的重量都超过了10kg,在目前的观点中过于沉重和笨重。模块重量是制约模块化机械手设计的重要因素之一;当在各种配置中选择时,这种情况就会中断,因为引力效应是不可忽视的。TOMMS[10]是一种三自由度机械手,有三个关节模块和可选的连杆模块,可分为卧式和立式两种装配方式。然而,通过并行总线的电气连接需要很多端口:三个输入端口(IP)和两个输出端口(OP)。模块间的电气连接应更加简化,更加实用。
模仿人类手臂运动机能学的肩、肘、腕关节的机械手构型的运动学表示是在零构型下使用滚转、俯仰和横摆轴的一系列旋转轴关节方向[11]。然而,很难找到一种系统的方法来为这种表示设置零配置。串链机械臂由一系列关节和连杆组成。使用滚转、俯仰和偏航的传统表示不能解释一系列关节轴之间与相邻链接的连接关系。因此,在描述串链机械手的构型时,应反映关节与相邻连杆之间的连接拓扑关系。
Groover根据机器人解剖学将工业机械臂中常用的转动关节分为R型、T型和V型[12]。Hong等通过旋转轴与相邻两个连杆的关系,将机械手的转动关节以表格的形式划分为R、T、V、D四种关节类型,并从碰撞安全的角度提出了一种合适的串联链式机械手关节构型[13]。本文采用一种新的方法在一个关节和两个相邻的输入/输出环节部件的模块中描述关节构型,将[13]中四种类型的转动关节简化为R型和T型关节。这种方法为模块化机械手的研究提供了新的视角。
本文第二节介绍了采用R型和T型关节的串联链模块化机械臂的关节构型。从第2节对节点配置的直观研究来看,第3节提出了模块化的节点和链路,可以配置一系列的节点和链路,也可以在相邻的两个节点模块之间直接连接而不需要连接。在第四节中,利用本文提出的新型关节和简单连杆模块,提出了三种类型的3自由度机械手。
2. 序列链模块化机械臂的关节构型
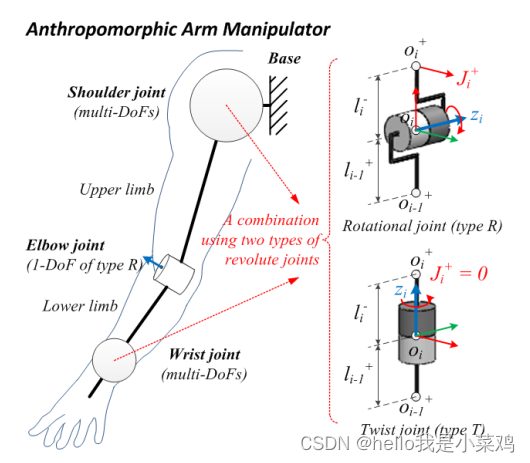
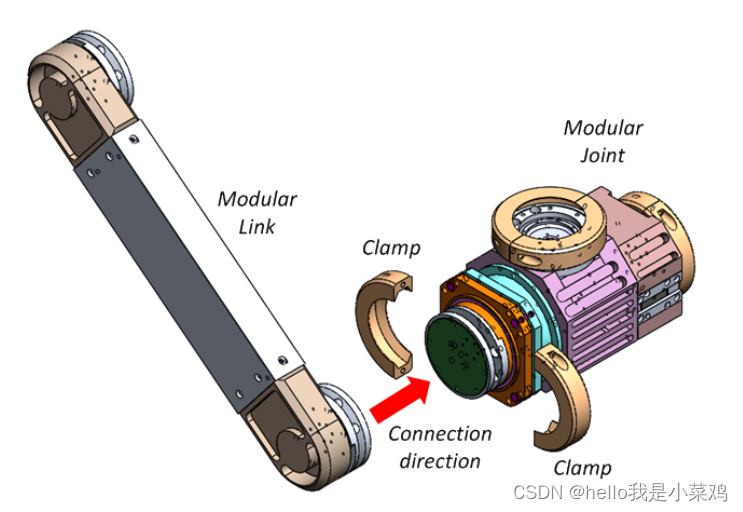
机械臂的关节类型大致可分为转动关节和移动关节。在本研究中,我们将重点研究由旋转关节组成的拟人机械臂。这种类型的机械臂具有从基座到末端执行器的一系列转动关节和链接。这些具有肩关节、肘关节和腕关节的串联式机械臂大多具有与人的手臂类似的6自由度或更多的关节(见图1左侧)。在本研究中,串联式机械臂将使用两种具有代表性的串联式机械臂旋转关节:旋转关节(R型)和扭转关节(T型),如图1右侧所示。
A. 旋转关节的类型
设一个连杆由
和
两部分组成。
是介于
和
之间的节点。那么,连杆
和连杆
分别是连接在关节
上的输入输出连杆的两个相邻部分,如图1右侧所示。设
和
为转动关节轴的中心,为关节i的转动轴zi的连杆,
为
处相对于
轴的线速度方向,如下所示:
(1)
对于R型关节,当关节i处发生角位移时,在节点处产生线速度
,而对于T型关节,
为0。这意味着传递力矩不是由碰撞安全意义上的任何外力产生的[13]。由于这些特点,两种类型的关节的组合是重要的。
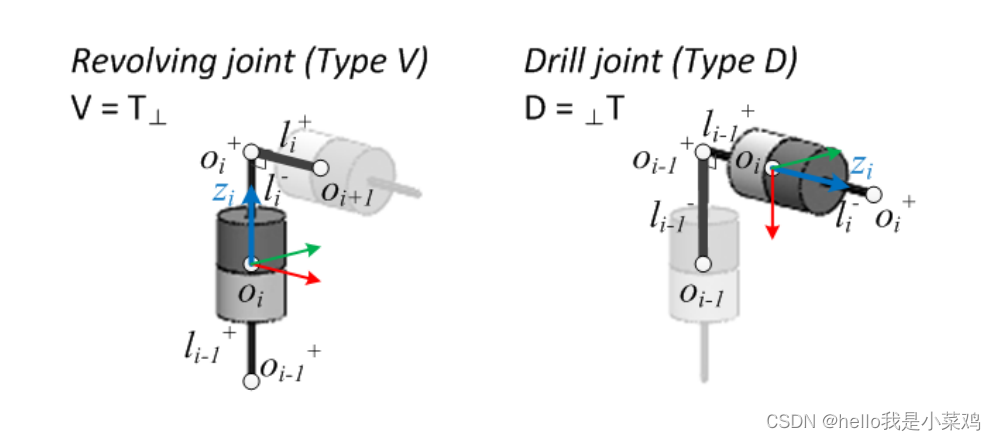
从图2可以看出,[13]中的V型和D型接头可以用T型接头来描述。此后,使用一个符号,意思是“垂直的”(简称“p”),以链路
的
和
之间的关系作为相对角位移,将4种关节类型减少为2种。当一个连杆(V型关节的连杆
或D型关节的连杆
)在关节
的原点
被朝着
方向弯曲时,符号
被使用。在一个旋转关节的情况下,一个符号
放在T的右边,就像
,代替V,符号
放在T的左边,就像
,代替D。因此,转动关节的机器人机械手可以完全描述只使用两种类型的关节,R和T类型。
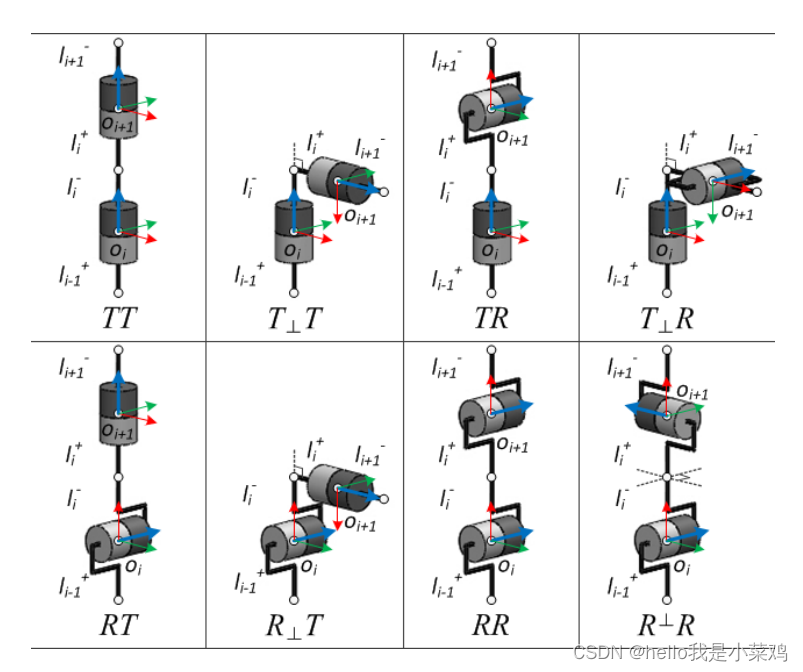
B. 用R型和T型的两种相邻关节
图3给出了使用R型和T型关节的两个相邻关节配置集的选择性示例。冒号“:”用于区分肩关节和肘关节或肘关节和腕关节。从现有机械手肩关节和腕关节的一部分可以很容易地找到TR、RT和RR构型。⊥由两个T型关节组成,其中两个关节轴之间存在一个垂直的弯曲角作为角偏移。为了简单起见,这种构型有助于从TT构型描述两个T型关节之间的弯曲连接。R⊥R构型由两个R型关节组成,其中在两个关节之间的连接处存在一个垂直的扭转角作为角偏移。如上所述,串联两个相邻的关节可以直观地表示为串联两个相邻的关节,利用关节构型的例子。
3. 关节和连接模组
A. 模组关节
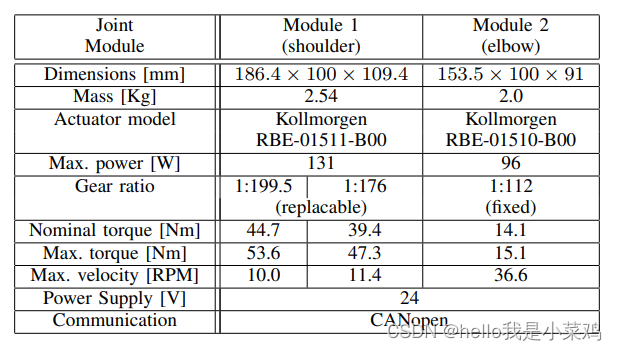
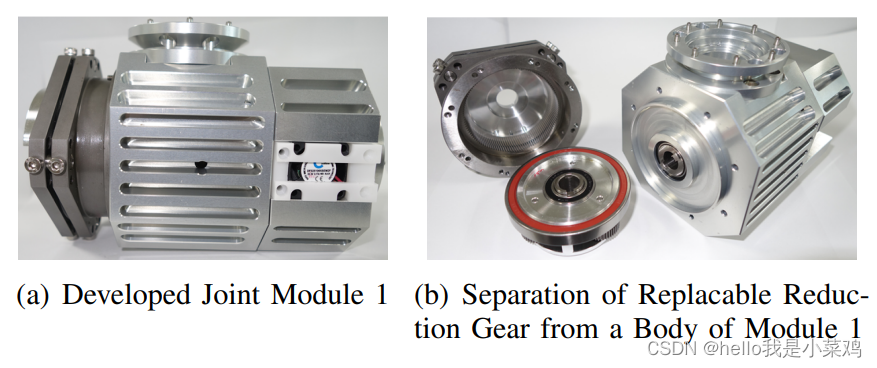
开发了两个关节模块作为概念验证(POC),以便将致动器,编码器和控制器安装在单个主体内,以实现关节的模块化。各关节模块的结构如图4所示。连接模块规格如表1所示。
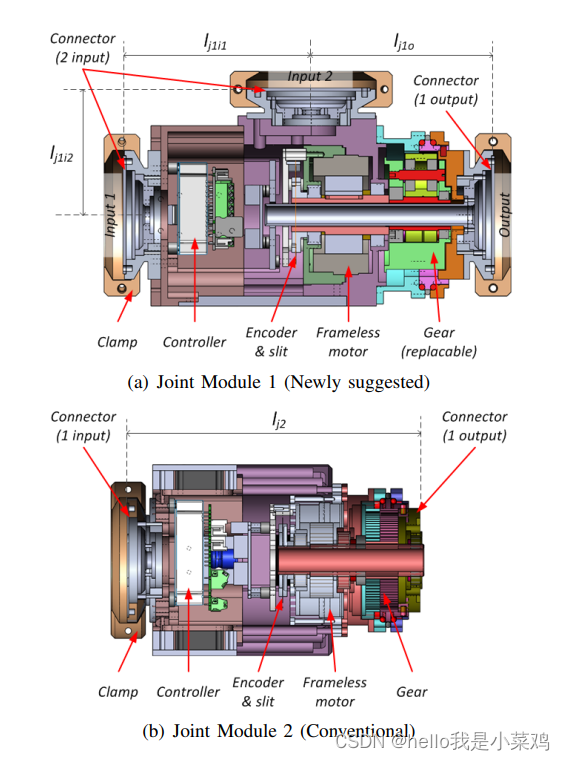
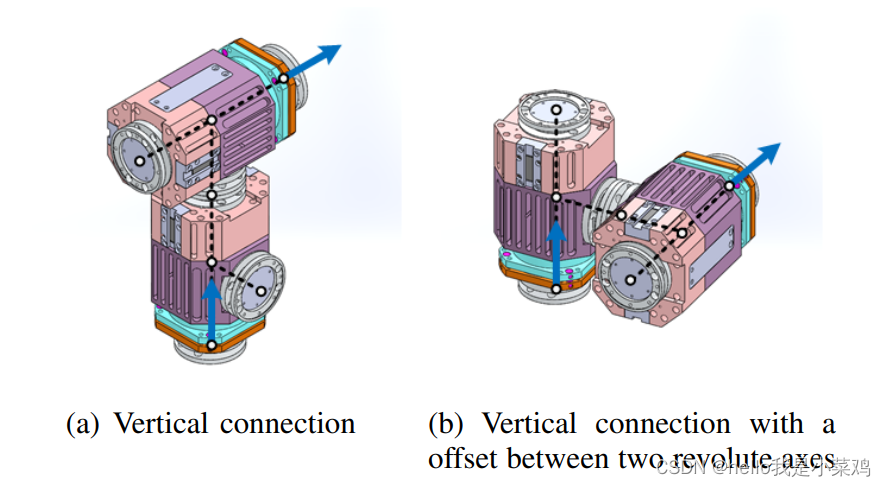
减速器可与接头模块本体分离,用户通过更换两种减速器,即可方便地改变减速比,如图5所示。一般来说,机械手由串联、交替和顺序连接的关节和连杆组成。接头模块1可以实现如图6所示的两个接头模块之间的直接连接,也可以实现接头模块与链路模块之间的一般连接。图中两种直接连接使用两个接头模块1的思路直观地来自于图3中两个相邻接头使用R型和T型接头的例子。
B. 连杆模组
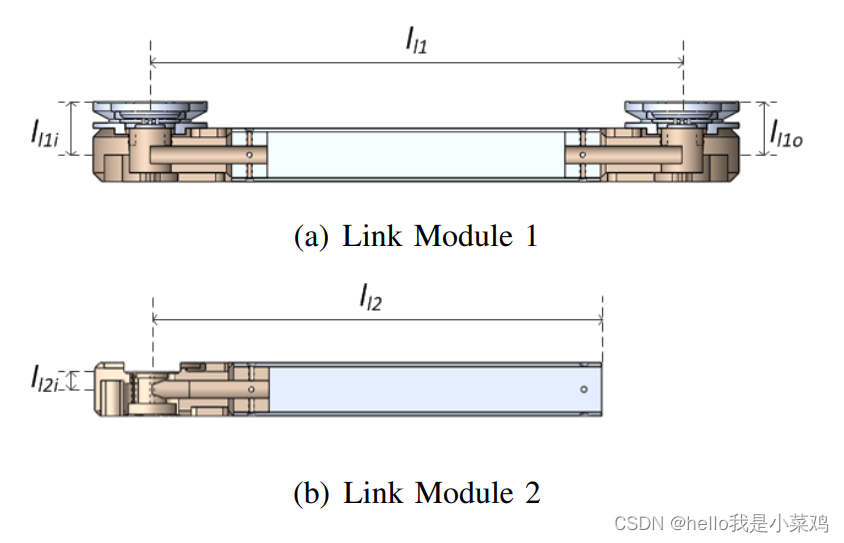
开发了两个链路模块作为POC,分别用于上、下链路。每个链路模块的结构如图7所示。每个链路模块对应一个RR配置,如图3所示。关节或链接模块的机械或电气连接的每种方法将在下一节中更详细地讨论。
4. 不同模组间的连接机制
A. 机械连接机制
在本节中,将介绍两个关节和/或连杆模块之间的机械连接。图8显示了链路模块与关节模块之间的连接关系。
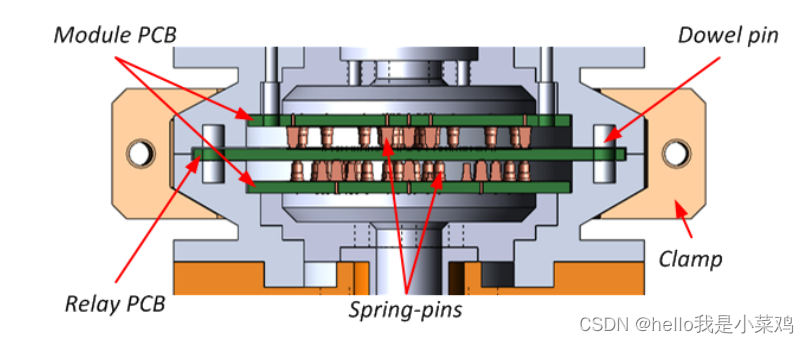
连接机制的横向截面视图如图9所示。除销销外,各连接面均具有对称结构。8个定位销通过8种45度间隔的相对位置帮助两个模块之间的连接对齐。两个连接面用定位销对中接触后,用两颗螺钉拧紧夹紧件,使其牢固结合。
B. 通信和电源总线的电子连接
为了尽量减少对接头配置或模块之间连接关系的依赖性,不仅要进行机械连接,还要通过通信和电源总线通过相对位置进行电气连接。
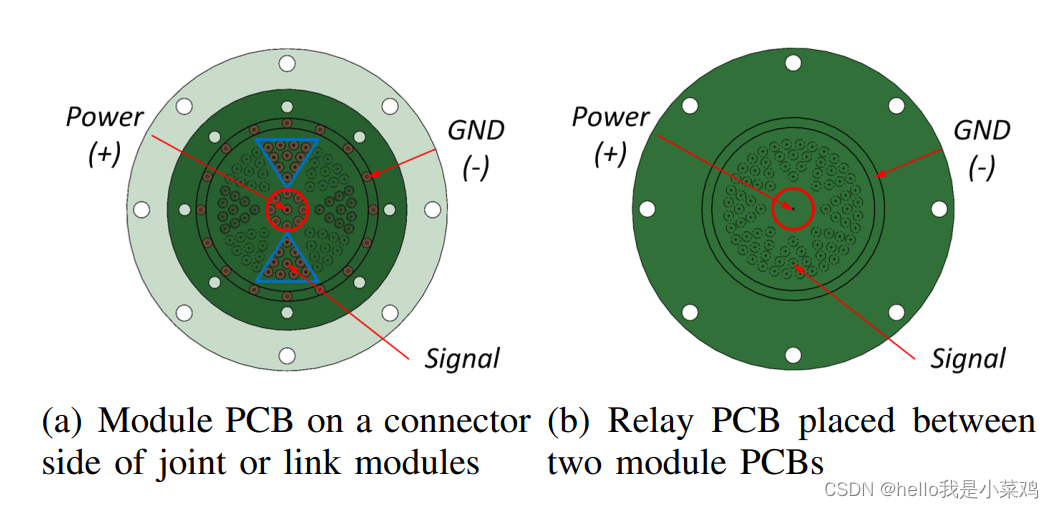
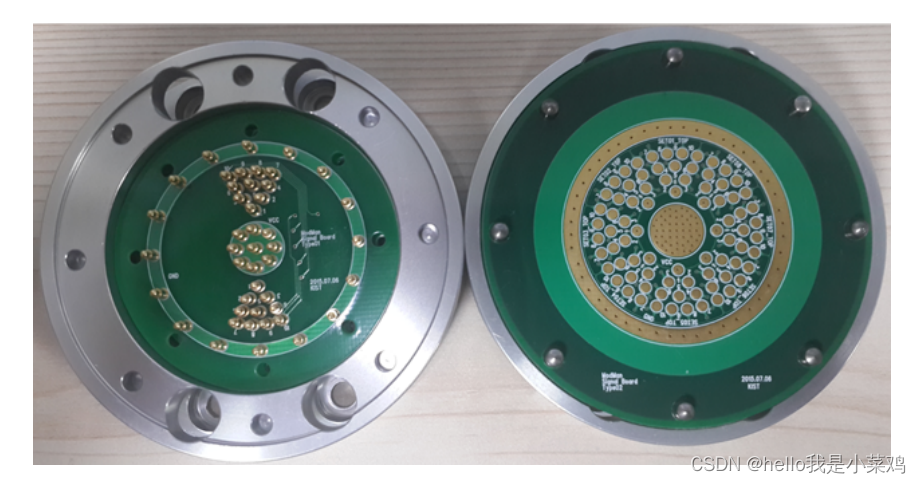
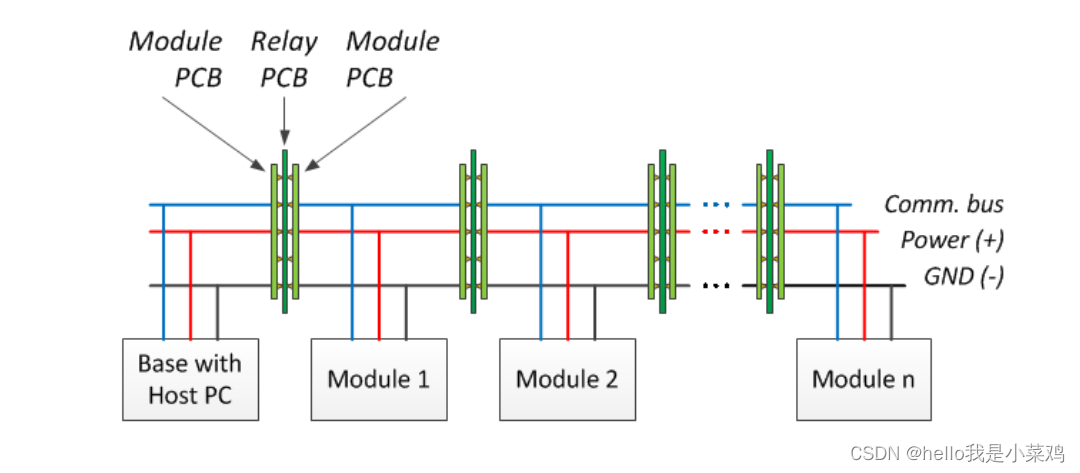
图10显示了模块和继电器pcb(印刷电路板)的通信和电源总线的设计,用于电气连接。继电器PCB起连接两个模块PCB的电触点的作用,它由三组弹簧引脚组成,如图9所示。三组弹簧销从中心向外依次为电源(红圈)、信号(蓝三角)和GND(圆环)。模块PCB上的弹簧引脚信号组由两个对称三角形组成。信号的两种对称布局的冗余使电气连接即使在很强的弯曲力作用下也能保持稳定。图11显示了开发的模块和继电器pcb上的每个连接器部件。带有模块PCB的连接器部件如图11左侧所示。如图11右侧所示的继电器PCB与模块PCB和定位销一起放置在连接器部分上。图12显示了相邻两个模块之间的每个电气连接是如何使用模块和继电器pcb从基础串联进行的。
5. 三自由度模块化机械臂的关节构型
利用关节和连杆模块,对三种关节构型的三自由度模块化机械臂进行了代表性的展示。
A. 类型1:TR:R配置(铰接式机器人1)
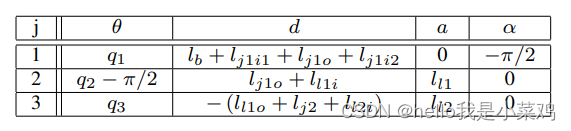
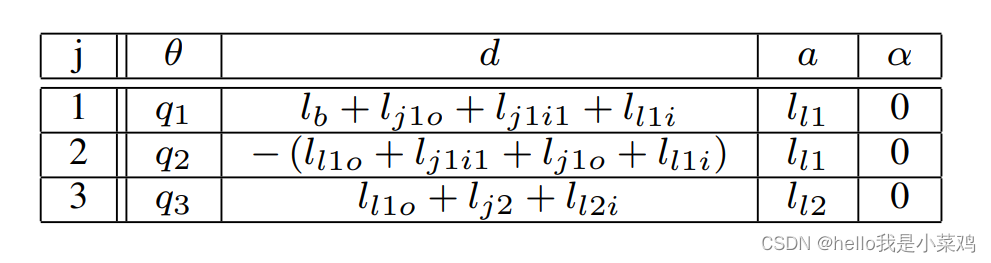
图13显示了具有TR:R配置的模块化机械手的零配置。该关节构型与PUMA560[14]机械手相似。图14是一个具有TR:R配置的3-DoF关节臂机械手的模块化示例。表2是TR:R配置的模块化机械手的标准D-H参数。D-H参数的接头和连杆模块尺寸(以符号形式表示)见图4和图4。设为基础模组的高度。
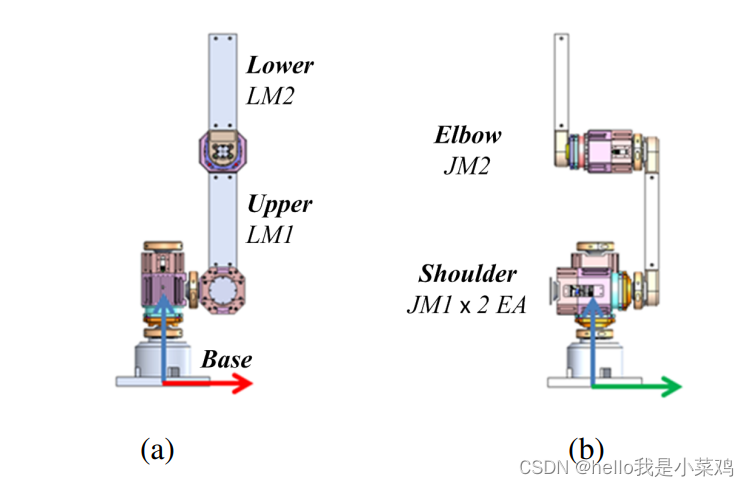
B. 类型2:T⊥R:R结构(铰接机器人2)
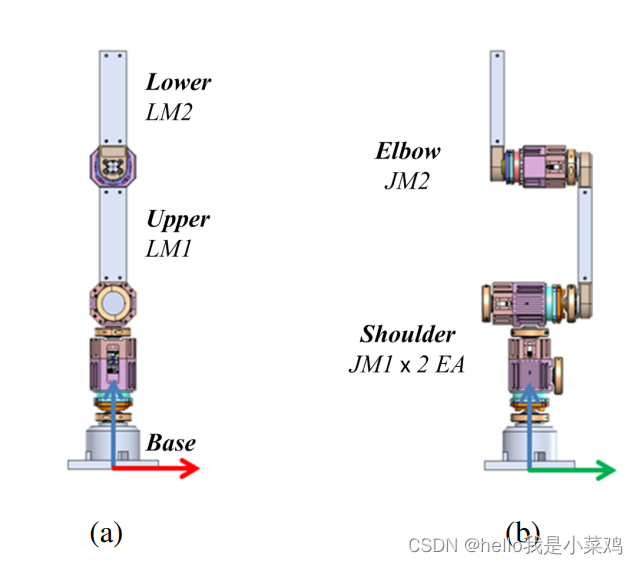
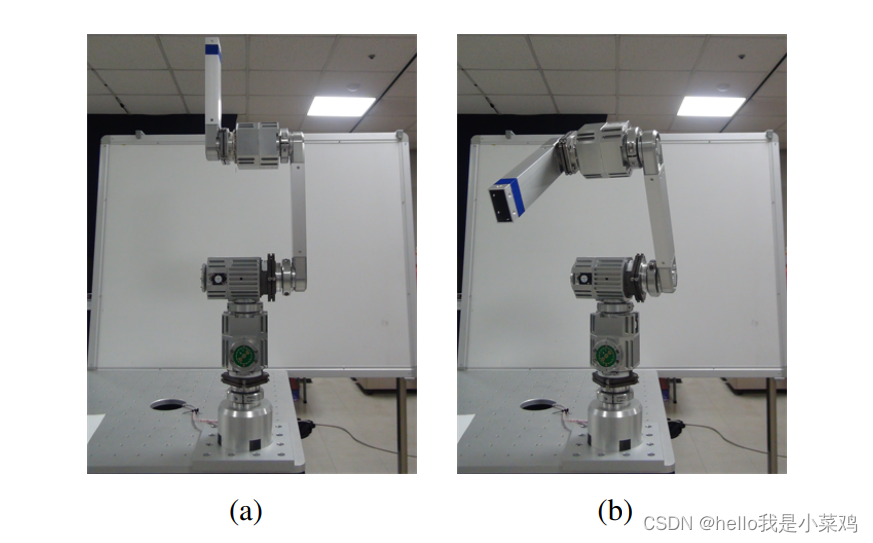
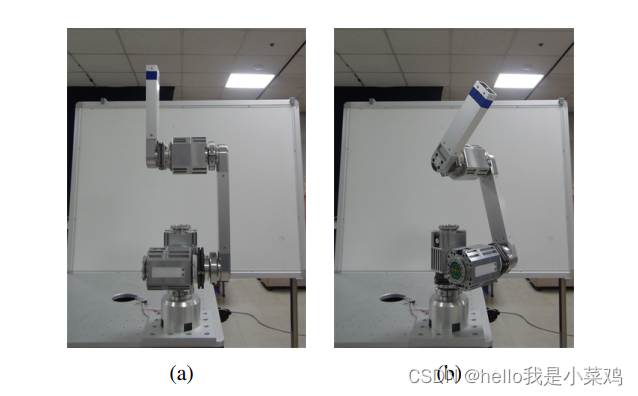
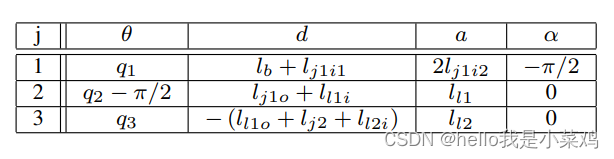
图15显示了具有T⊥R:R结构的模态机械手的零结构。在这种情况下,肩关节具有两个旋转轴之间的偏移的2-DoF垂直连接。它有一个关节构型,任何单一的姿势都不会像TR:R构型那样出现。图16是一个具有T⊥R:R结构的3-DoF关节臂机械臂的模块化示例。表III是具有T⊥R:R配置的模块化机械手的标准D-H参数。
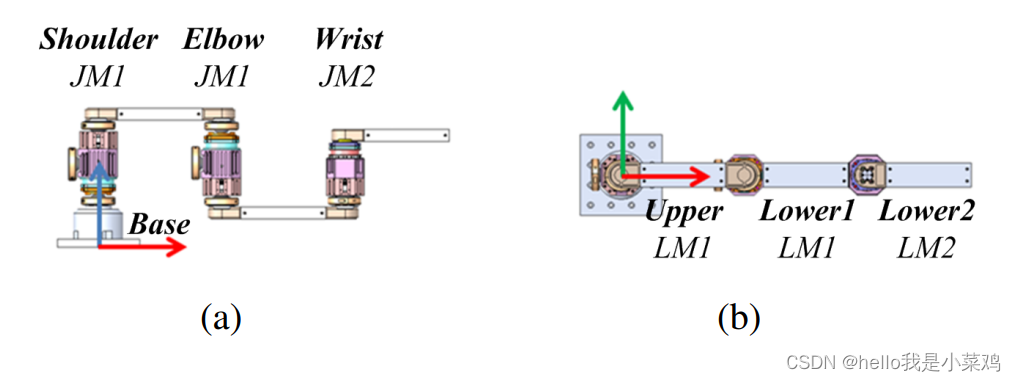
C. 类型3:R:R:R结构(平面臂)
图17显示了具有R:R:R配置的模块化机械手的零配置。在这种情况下,肩关节、肘关节和手腕关节的每个旋转轴在同一方向上平行放置。这种关节结构类似于SCARA机械手。图18是一个具有R:R:R配置的3-DoF刨床机械臂的模块化示例。表4是R:R:R配置的模块化机械手的标准DH参数。

5. 结论
本文为使用R型或T型关节的模块化机械臂的可想象组合提供了运动学直觉。无论机械臂的构型为零,串行链机械臂都可以通过转动关节和相邻连杆的连接拓扑来描述为两种类型的关节。这种运动学模块化为模块化机械手的设计提供了一个简单的新视角。提出了一种新型的双输入一输出连接模块。新开发的关节和链接模块不仅可以在关节和链接模块之间耦合,而且可以直接在两个关节模块之间耦合。机械和电气连接的实用解决方案提供了八种相邻模块之间的相对位置,方便的绑定和释放。因此,即使连杆模块的数量少于机械手的自由度,这些模块和连接也可以描述更多样化的关节构型。
在未来的工作中,模块化机械手系统将提供一个功能,通过电气连接自动识别模块的串行链连接,在装配时方便快捷地夹紧。此外,除了RR配置的链路模块外,本研究还将提出其他类型的链路模块。

















 5534
5534

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









