







水下机器人,AUV,UUV,运动学,动力学建模,控制,仿真。Pid算法,滑膜控制和模糊控制。matlab,simulink。
文章目录
水下机器人(AUV/UUV)的建模、控制和仿真涉及运动学、动力学建模以及多种控制算法的应用,如 PID 控制、滑模控制(Sliding Mode Control, SMC)和模糊控制(Fuzzy Control)。以下是一个完整的框架,包括理论基础、MATLAB/Simulink 实现代码和仿真结果。
1. 水下机器人运动学和动力学建模
(1)运动学模型
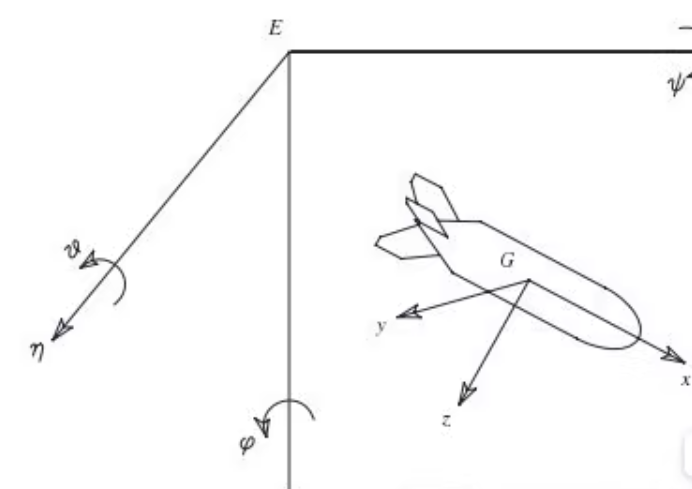
- 位置与姿态:水下机器人的状态通常用六自由度(6-DOF)表示:
- 位置:$ x, y, z $(在惯性坐标系中)。
- 姿态:横滚角 ϕ \phi ϕ、俯仰角 θ \theta θ、偏航角 ψ \psi ψ。
- 速度与角速度:
- 线速度:$ u, v, w $(沿机体坐标系的三个轴)。
- 角速度:$ p, q, r $(绕机体坐标系的三个轴)。
运动学方程:
η ˙ = J ( η ) ⋅ ν , η = [ x , y , z , ϕ , θ , ψ ] T , ν = [ u , v , w , p , q , r ] T , \begin{aligned} \dot{\mathbf{\eta}} &= \mathbf{J}(\mathbf{\eta}) \cdot \mathbf{\nu}, \\ \mathbf{\eta} &= [x, y, z, \phi, \theta, \psi]^T, \\ \mathbf{\nu} &= [u, v, w, p, q, r]^T, \end{aligned} η˙ην=J(η)⋅ν,=[x,y,z,ϕ,θ,ψ]T,=[u,v,w,p,q,r]T,
其中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6051
6051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









