







Normalization作用是通过标准化隐藏层的输出,稳定训练过程,缓解梯度消失或爆炸问题,同时加速收敛并提高模型泛化能力
这里的“Add”就是残差操作,缓解深层网络梯度消失问题
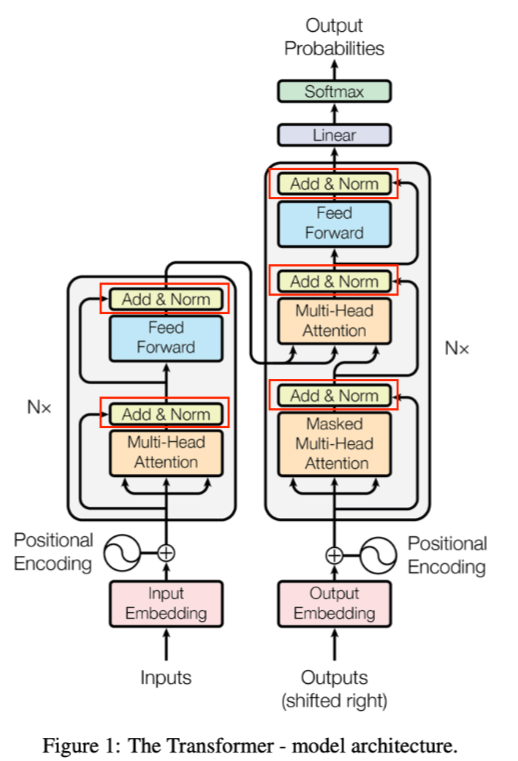
Normalization(归一化):目的是通过对激活值或特征张量进行规范化处理,使得缓解梯度消失、加速模型收敛、增强模型泛化能力.
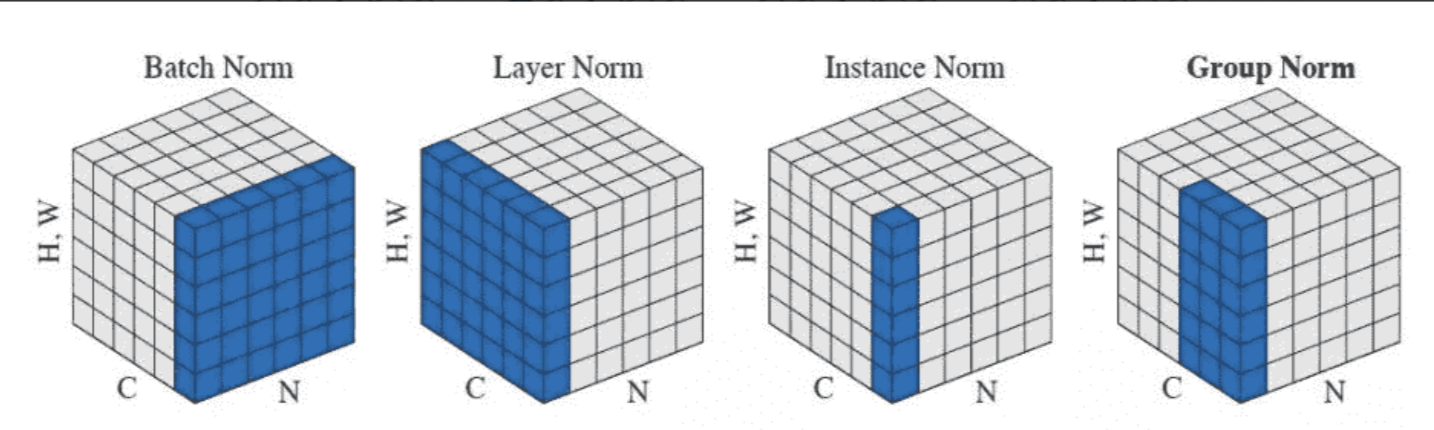
又有其它多种归一化技术,如Batch Normalization(BN)、Layer Normalization(LN)、Instance Normalization(IN)、Group Normalization(GN)、RMS Norm以及 超深层模型有效的Deep Norm等。
BatchNorm
为什么进行BN?
- 深度神经网络训练过程中,采用mini-batch进行梯度下降时,每个batch数据分布不同,使得网络各层的输入分布在训练过程中不断发生漂移(ICS),使得模型训练变得困难,收敛速度变慢。
ICS是指前面batch训练时会影响到后续batch的训练,让模型在这条道路一直训练,起了形象的名字——漂移。
- BN核心思想是在激活函数前,对每个通道在batch维度上计算均值与方差,并将激活值约束到均值为0、方差为1的分布 (再加上可学习的缩放与偏置系数),可减小ICS问题
BN的计算过程
如果某层输出维度为[N,C,H,W],其中N表示batch_size,C为通道数,H和W分别为表示特征图的高和宽。
沿着通道方向计算每个batch的均值和方差,即对同一通道内的所有样本像素进行统计:
1.计算均值\:
2.计算方差:
3.归一化:
是一个非常小的正数,它的作用是防止分母为零或接近零的情况,从而避免计算时出现数值不稳定或错误。
4.缩放和平移:,其中
为可学习参数,初始时
BN的作用
- 减少ICS,避免梯度消失、爆炸
- 允许使用较大的学习率
- 降低对权重初始化的敏感度
- 对隐藏层输出有轻微的正则化效果(类似在隐藏层加入噪声)
BN存在的问题
- 当batch_size太小:统计的均值、方差估计不准确,不足以代表整体数据分布
- 当batch_size太大:消耗显存且训练慢
- 不适用于对序列长度较不固定或batch_size=1的场景,BN效果不佳
Layer Normalization(LN)
在很多任务里,batch_size很小,甚至为1;在RNN里,每一步输入大小各异, BN难以奏效。LN则解决这一问题,不依赖batch维度,在单个样本内对特征进行归一化。
LN计算公式
统计量计算维度:
- 对于每个样本
,在其 所有通道 + 所有空间位置 上计算均值和方差。
- 即:每个样本自己内部做归一化。
数学公式:
对于第 个样本:
然后进行归一化:
最后缩放和平移(对每个样本可以独立设置参数,也可以共享):
(注意:这里 可以是每个通道一个,也可以是整个层共享)
nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True)- normalized_shape 指出在特征张量的哪些维度上做LN;
- eps 为防止分母的方差估计趋近于0
- elementwise_affine 指是否使用可学习的
特点
- 不依赖batch: 适用与batch_size很小的情况,以及在序列建模(RNN、Transformer)的场景
- 对序列建模效果明显:由于不依赖batch_size大小和时间序列长度,在循环网络中能稳定激活分布,加快收敛。
- 在CNN上效果比BN差: LN统计范围相当于每个通道都被参与计算,会损失某些图像特征的局部性。
总结
- BN(BatchNorm):对一个 batch 内的每个通道(channel)单独计算均值和方差。
- LN(LayerNorm):对单个样本的所有通道、空间位置一起计算均值和方差。
BN vs LN 的关键对比
| 特性 | BatchNorm (BN) | LayerNorm (LN) |
|---|---|---|
| 统计维度 | 同一通道下,跨 batch 和空间 | 同一批次下,跨通道和空间 |
| 是否依赖 batch 大小 | 是 | 否 |
| 是否适合 RNN / Transformer | 否 | 是 ✅ |
| 对 batch size 敏感 | 是(小 batch 影响效果) | 否 |
| 是否保留样本差异性 | 否(batch 内共享统计) | 是 ✅ |
| 应用场景 | CNN 图像任务 | NLP、Transformer、小 batch 场景 |
举个例子说明差异
假设你有一个 batch 中有 2 张图片,每张图片有 3 个通道(RGB),尺寸是 :
- BN:对每个通道(如 R 通道)把这 2 张图的所有像素(共
)拿来算均值和方差。
- LN:对每一张图,把它所有的像素(共
)拿来算均值和方差。
实际应用中的选择建议
| 模型类型 | 推荐使用 |
|---|---|
| CNN 图像分类 | BatchNorm ✅ |
| RNN / LSTM / GRU | LayerNorm ✅ |
| Transformer | LayerNorm ✅ |
| 小 batch size | LayerNorm 更稳定 |
| 分布变化大或 batch 不稳定 | LayerNorm 更鲁棒 |
总结
| 层面 | BatchNorm | LayerNorm |
|---|---|---|
| 统计对象 | 每个通道(C) | 每个样本(N) |
| 统计范围 | batch + 空间 | 通道 + 空间 |
| 是否依赖 batch | 是 | 否 |
| 适用网络 | CNN | RNN、Transformer |
| 数学表达 | 均值 | 均值 |
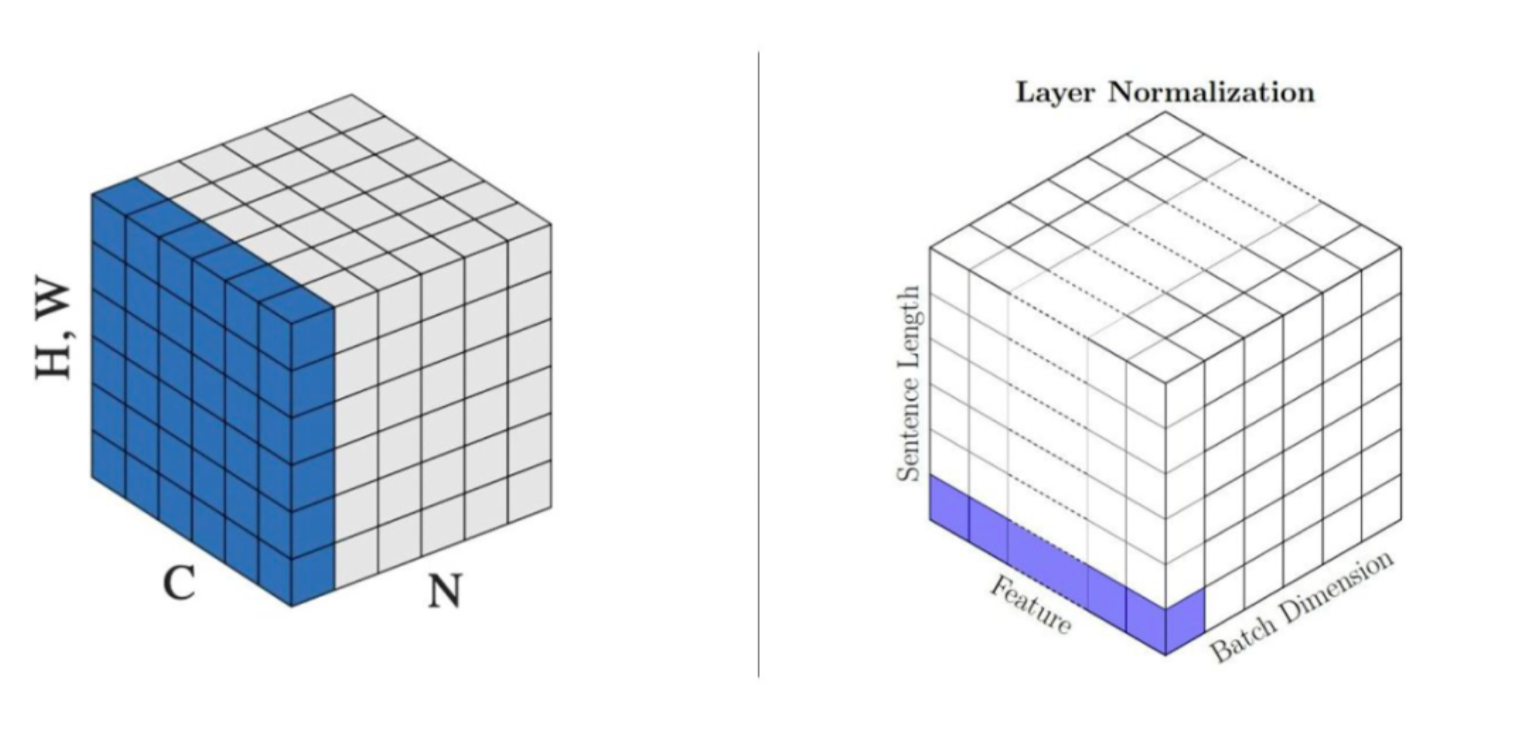
Transformer中的LayerNorm解释
对这张图可能会做出这样的转化:
不过这样转化对BatchNorm是可以的,但对于LayerNorm就不对了。
Examples:
# NLP Example
>>> batch, sentence_length, embedding_dim = 20, 5, 10
>>> embedding = torch.randn(batch, sentence_length, embedding_dim)
>>> layer_norm = nn.LayerNorm(embedding_dim)
>>> # Activate module
>>> layer_norm(embedding)
# Image Example
>>> N, C, H, W = 20, 5, 10, 10
>>> input = torch.randn(N, C, H, W)
>>> # Normalize over the last three dimensions (i.e. the channel and spatial dimensions)
>>> layer_norm = nn.LayerNorm([C, H, W])
>>> output = layer_norm(input)可以看到对于NLP model(Bert之后的)LayerNorm有着不同的用法,可以用下面这张图描述, LayerNorm是对每一个token的hidden_dim做归一化:
torch.nn.LayerNorm( normalized_shape, eps=1e-05, elementwise_affine=True, bias=True,device=None,dtype=None)LN的归一化需要两个trainable参数,以及分母上的eps
- 手撕LayerNorm (deepseek面试题)
import torch
import torch.nn as nn
class LayerNorm(nn.Module):
def __init__(self, featurea, eps=1e-6):
super().__init__()
self.gamma = nn.Parameter(torch.ones(features))
self.beta = nn.Parameter(torch.zero(features))
self.eps = eps
def forward(self, x):
mean = x.mean(-1, keepdim = True)
std = x.std(-1, keepdim = True, unbiased = False)
return self.gamma * (x - mean) / (std + self.eps) + self.beta
fearures = 768
layer_norm = LayerNorm(features)
x = torch.randn(10, 20, features)
normalized_x = layer_norm(x)
print(normalized_x)如果您认为博文还不错,请帮忙点赞、收藏、关注。您的反馈是我的原动力

















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









