






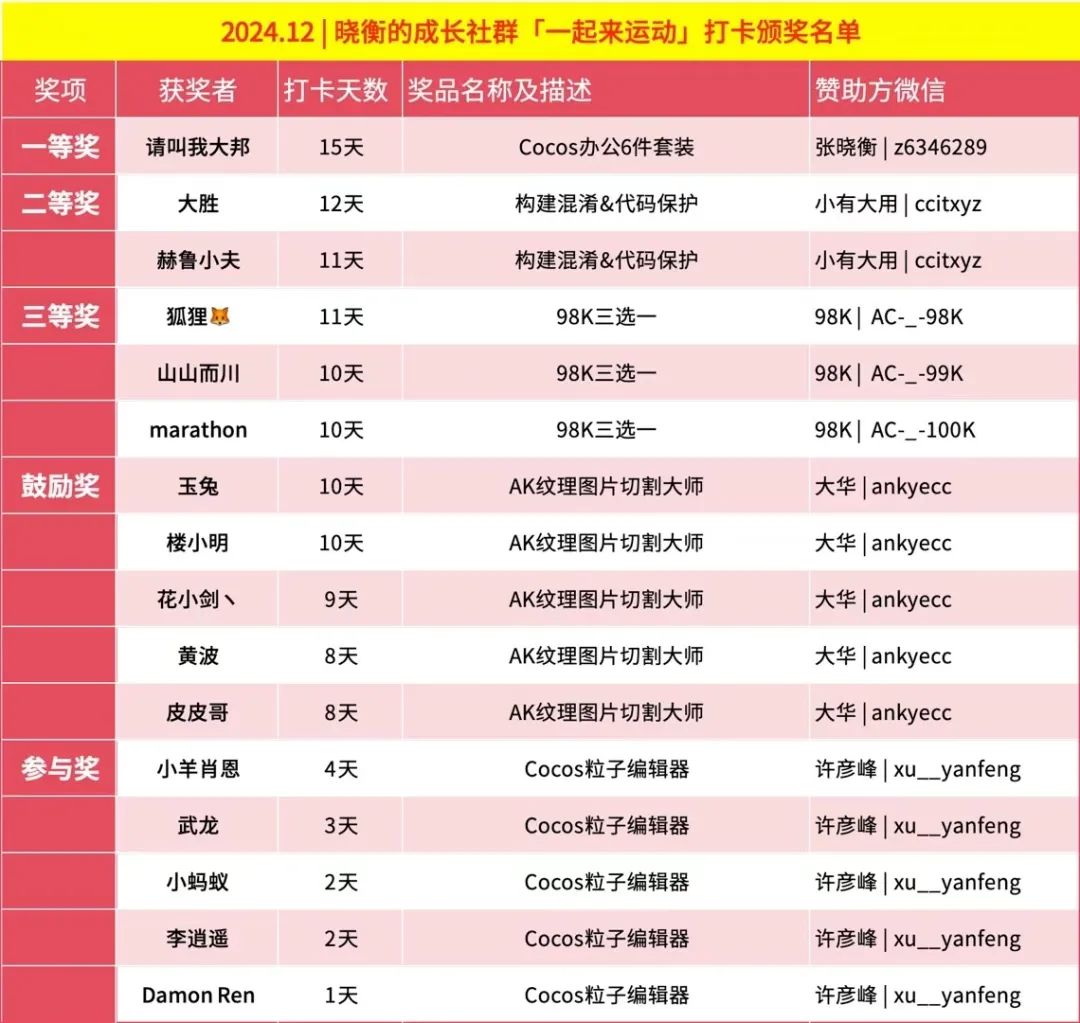
 恭喜大邦同学打卡15天,获得一等大奖!
恭喜大邦同学打卡15天,获得一等大奖!
晓衡的运动夸夸群,大家因一时的兴趣与激情走到了一起,有了伙伴和战友们的夸赞、鼓励加持,很多人都能坚持打10天💪
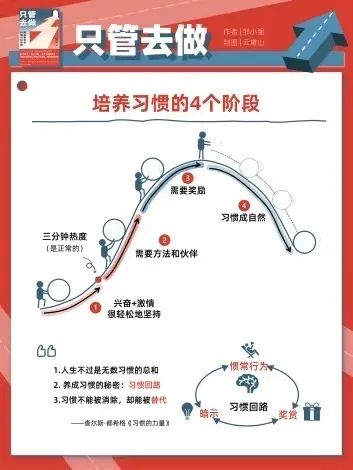
培养习惯的4个阶段:
一是兴趣;二是方法与伙伴,孔子说过「独学而无友,则孤陋而寡闻」;三是,这31天过去,是该收获阶段性果实的时候了,各位不要忘记奖励自己❤️
在此晓衡特别感谢,赞助活动的大佬们!
今天2期开营,邀请有运动习惯或想开启运动的朋友们一起来锻炼💪

🌟人是一快乐就会充满能量的生物!
🌈人是一被夸奖就会成长的生物!
💖人是一旦感受到被爱就会开花的生物!
🏃♀️一起运动打卡,相互夸夸一起成长,热爱生活!💪💕
还没有养成运动习惯的朋友,运动打卡不一定非要30分钟。
这个群能帮助大家养成运动的微习惯就好,你就已经赚到了。
每天只做 1 俯卧撑,不管你再怎么忙,都是能搞得定的吧!
如果你的状态好,就尝试挑战自己的极限;
状态一般争取运动流汗 30 分钟心率,不低于70%;
状态不好的时候就做10 个 20 个也可以;
遇到心情emo的时候,那就做 1 个就行啦!
2025 期待与你链接,利用微习惯,帮助我们一起培养出运动的好习惯!
添加晓衡微信,支付 9.9 元邀请加群一起来锻炼💪


















 5048
5048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









