







一、机器人原点位置的定义
一般来说,机器人人原点位置是在不同机器人使用场景下,最适合机器人的初始位置我们把这个点位叫作机器人原点,也可以叫HOME点、起始点等。
二、创建机器人回原点位置的子程序
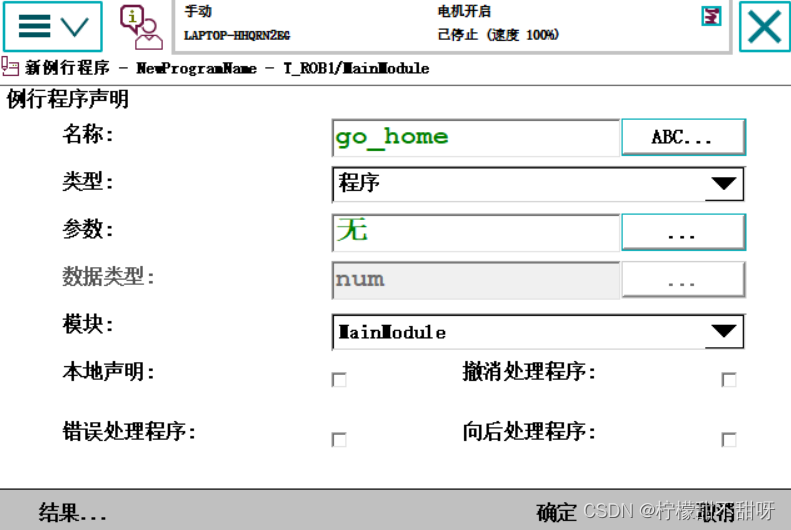
在程序编辑页面创建一个回原点的例行程序名称为:go_home
三、机器人回原点位置的方法
1、设定初始机器人关节角(复杂环境不推荐)
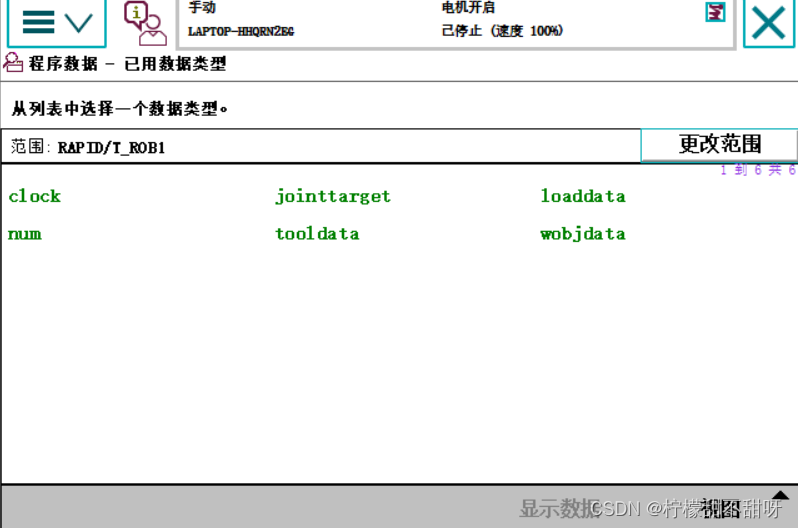
在ABB机器人数据类型界面创建一个类型为jointtarget的点位数据
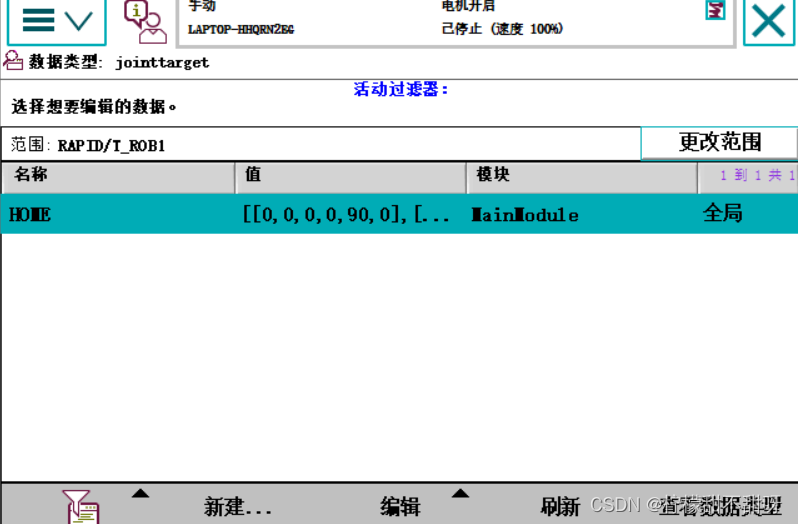
1-6轴关节角的度数分别为0,0&#
一般来说,机器人人原点位置是在不同机器人使用场景下,最适合机器人的初始位置我们把这个点位叫作机器人原点,也可以叫HOME点、起始点等。
在程序编辑页面创建一个回原点的例行程序名称为:go_home
1、设定初始机器人关节角(复杂环境不推荐)
在ABB机器人数据类型界面创建一个类型为jointtarget的点位数据
1-6轴关节角的度数分别为0,0&#
 3982
1508
3982
1508

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























