







一、FANUC机器人寄存器变量
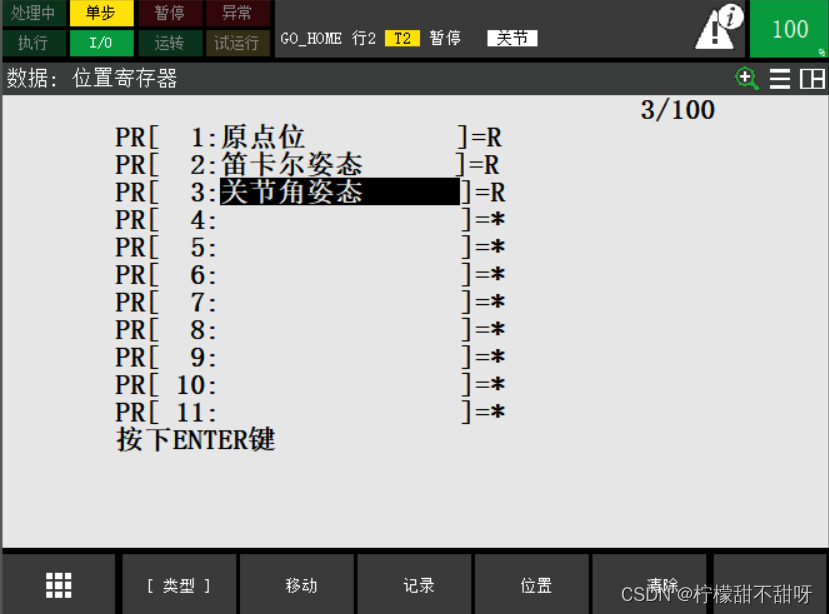
在位置寄存器中存储需要用到的3个位置寄存器变量,分别是原点位、笛卡尔姿态、关节姿态。
二、创建回原点TP程序
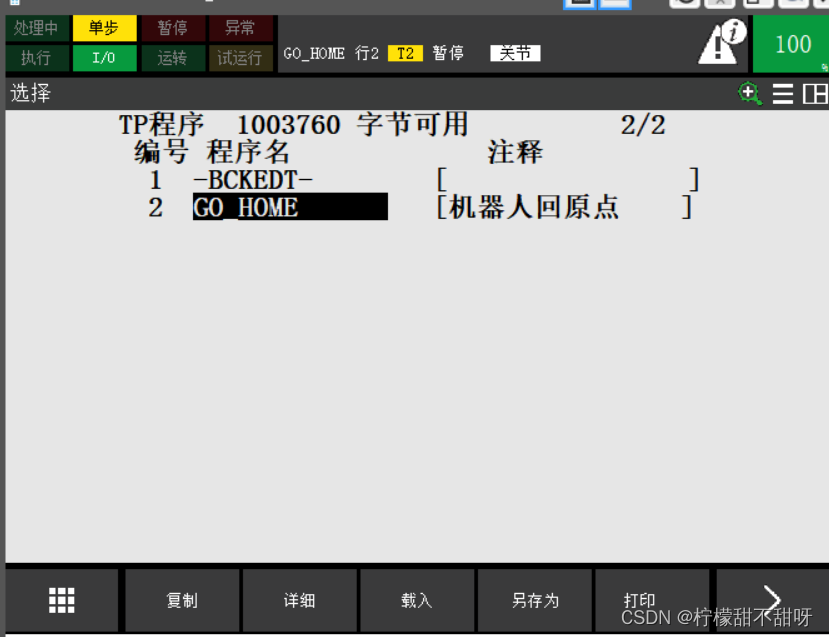
在程序创建页面创建回原点的TP程序go_home,之后进入该程序进行程序的编写。
三、添加对应的编程指令
首先获取机器人当前位置的笛卡尔坐标和关节坐标
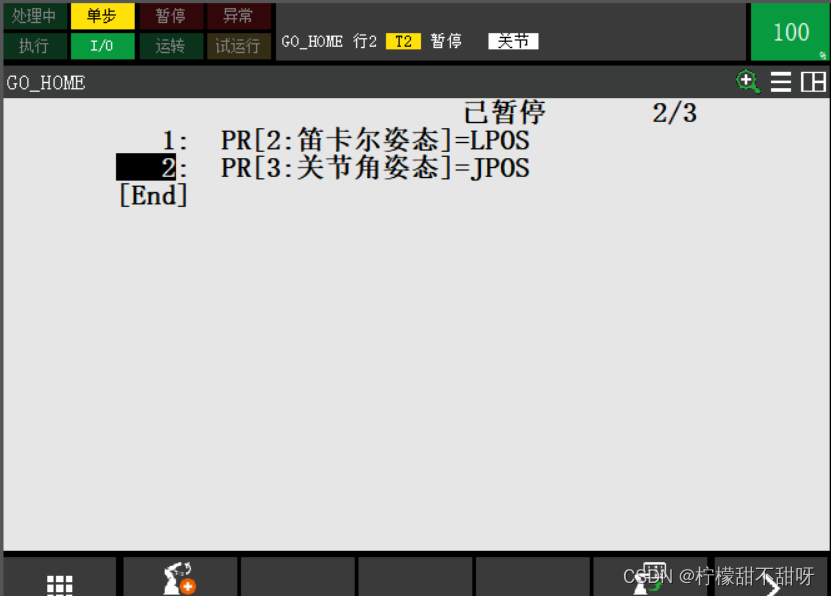
设定一个初始高度,并赋值给位置寄存器PR[2]的Z轴。
在位置寄存器中存储需要用到的3个位置寄存器变量,分别是原点位、笛卡尔姿态、关节姿态。
在程序创建页面创建回原点的TP程序go_home,之后进入该程序进行程序的编写。
首先获取机器人当前位置的笛卡尔坐标和关节坐标
设定一个初始高度,并赋值给位置寄存器PR[2]的Z轴。
 3609
3609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























