







 幻尔科技发布JetMax智能视觉机械臂,该产品基于Jetson Nano主板,融合人工智能与桌面机械臂,实现机器学习应用。JetMax在海外众筹成功,受到好评。其开放的AI创意项目涵盖人脸识别、物品抓取、智能监控等多个领域,适用于学习、研究及工业模拟。
幻尔科技发布JetMax智能视觉机械臂,该产品基于Jetson Nano主板,融合人工智能与桌面机械臂,实现机器学习应用。JetMax在海外众筹成功,受到好评。其开放的AI创意项目涵盖人脸识别、物品抓取、智能监控等多个领域,适用于学习、研究及工业模拟。
作为一家秉承初心的AI教育机器人公司,我们一直为大家提供各种有趣且开源的AI机器人产品。
2020年下半年,我们幻尔的工程师们打算在机器人上注入更多高级的人工智能元素,打造出一个跨时代的、更高级的AI机器人系列,来帮助大家更好地学习机器人技术和人工智能技术,更方便的将AI创意变成现实!

在幻尔工程师小哥哥们的努力下,经过近一年的打磨,这个系列的首款产品—JetMax智能视觉机械臂。
在海外Kickstarter平台上圆满完成众筹,并受到了海外媒体和粉丝的广泛好评!
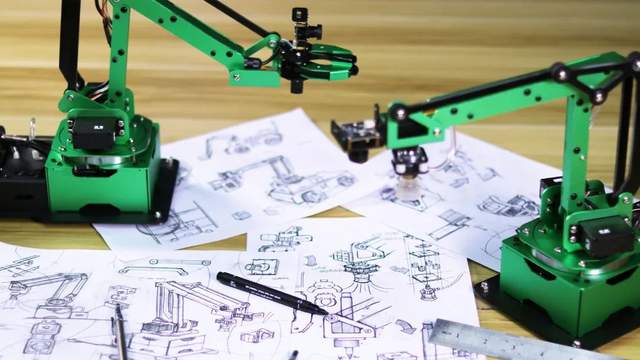
这款AI视觉机械臂-JetMax,是真正做到将人工智能与桌面机械臂完美结合的产品,它基于Jetson Nano主板开发,将其算力方面的优势发挥到了极致!
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2197
2197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









