







代码链接代码
摘要
在许多道路交通状况不受限制的亚洲国家,不戴头盔和骑三车等违章驾驶是摩托车死亡的重要来源。识别和惩罚此类骑手对于遏制道路交通事故和提高公民安全至关重要。出于这种动机,我们提出了一种方法,用于检测,跟踪和计数从车载仪表板摄像机拍摄的视频中的摩托车骑行违规行为。我们采用基于课程学习的对象检测器来更好地应对诸如遮挡之类的具有挑战性的场景。我们引入了一种新颖的梯形对象边界表示形式,以提高鲁棒性并解决骑手-摩托车的关联。我们还介绍了一种amodal回归器,该回归器为被遮挡的骑手生成边界框。在大规模无约束驱动数据集上的实验结果表明,与现有方法和其他消融变体相比,我们的方法具有优越性。
数据集
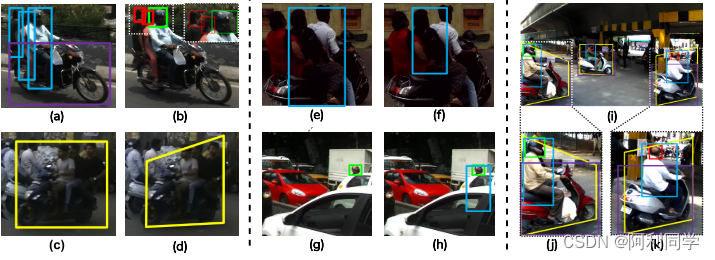
我们训练各种识别摩托车违规的模型。我们使用印度驾驶数据集 (IDD) [26] 的子集,通过选择带有摩托车和骑手的图像,然后基于900平方像素的面积阈值过滤出小边界框,因为低分辨率框将噪声样本添加到训练数据。我们注释了头盔类、无头盔类和梯形驾驶实例类 (参见图2 b-d,i-k)。我们使用常规的矩形框来违反头盔,并提出了梯形边界框来检测三重骑行违规。现在我们讨论如何对数据集进行预处理。
研究重点
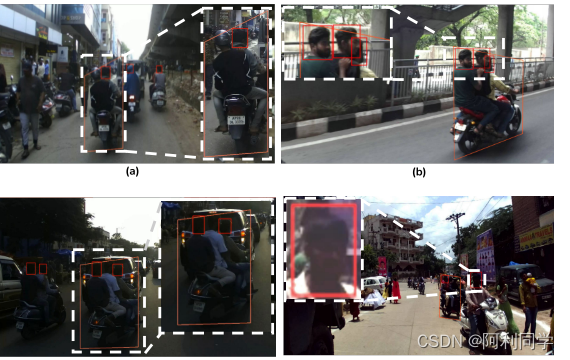
由于摩托车与其骑手之间的重叠区域,通用的两类骑手-摩托车检测器的性能较差。由于一个或多个重叠预测的置信度较低和非最大抑制 (NMS),重叠区域导致类间混淆,进而导致假阴性。如图3 (a) 所示,我们提出了一种基于CL的检测器,以避免此类问题。该模型首先仅在摩托车实例上进行训练,然后在添加rider实例后进行重新训练。正如我们将在第二节看到的。如图5所示,与通用模型相比,召回率显着提高,这是假阳性减少的结果。
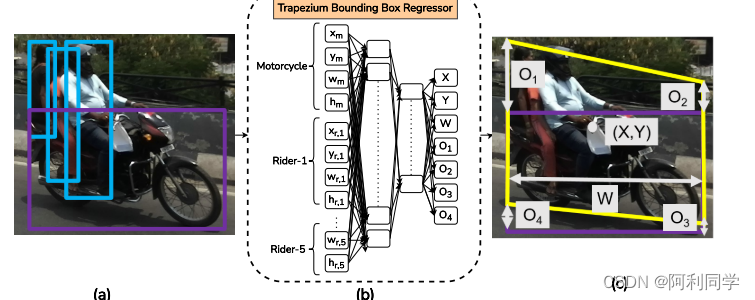
与之相交的每个预测的摩托车框和骑手边界框都形成了梯形回归器的输入。回归器检测驾驶实例,以计算具有最高欠条的骑手箱和获得的梯形; 识别三重骑行违规。由此导致的假阳性骑手对应关系的减少也导致Tab中的三重骑行违规的大量55.44% 精度增益。2. (a) (b) © 图4。不同的基于IOU的相关方法将骑手与他们的摩托车联系起来。
注意 😦 a) 演示了使用摩托车箱 (紫色) 与基于骑手箱的IOU关联 (蓝色),但前者具有低IOU与所有后者,(b) 演示了使用实例箱 (黄色),但是靠近相机的盒子对所有三个骑手都有很高的IOU,© [建议] 方法使用梯形实例盒 (黄色) 具有很高的IOU,其中两个是真正的骑手,而低IOU则来自另一个摩托车。4.2。识别三重骑行违规本节讨论梯形箱回归器 (参见图3 d) 和用于识别三重梯形包围箱回归器的骑手计数步骤: 我们的数据包含高度非结构化和拥挤的场景。
因此,如图4 (a) 所示,依赖于骑手和他们的摩托车之间的基于IOU的导出的相关性对于三骑违例的准确识别变得错误。类似地,在这种相关的骑乘者和摩托车上绘制矩形框也成为问题,因为在许多情况下,这种框的大部分覆盖背景区域并与其他摩托车的骑乘者相交,如图4 (b) 所示。因此,如图4 © 所示,我们利用新颖的梯形边界框,该框比矩形更紧密地限制相关的骑手和摩托车。我们训练在相应的隐藏层中具有512和256节点的两层深度网络 (参见图5 b),并使用具有0.001学习率的tanh激活。

结论
本文提出了一种新颖的体系结构,该体系结构能够使用安装在车辆上的摄像头在拥挤的亚洲街道上检测,跟踪和计数三重骑行和头盔违规行为。我们的方法共同解决了这两种违规行为。拟议的框架优于现有的违规方法,因为它能够在拥挤的情况下处理其他摩托车的骑手遮挡,假阴性和假阳性骑行。我们证明了将课程学习用于摩托车违规和梯形边界框而不是传统的矩形框的有效性。我们的工作为利用此类系统提高道路安全性奠定了基础。它可以在城市的任何角落用于监视,而无需花费静态摄像机网络。将来,我们希望探索将系统部署到分布式GPU设置以进行全市监控的可能性。
重要代码
import os
from operator import index
# comment out below line to enable tensorflow logging outputs
os.environ['TF_CPP_MIN_LOG_LEVEL'] = '3'
import time
import tensorflow as tf
import tensorflow.keras as keras
physical_devices = tf.config.experimental.list_physical_devices('GPU')
if len(physical_devices) > 0:
tf.config.experimental.set_memory_growth(physical_devices[0], True)
from absl import app, flags, logging
from absl.flags import FLAGS
import core.utils as utils
from core.yolov4 import filter_boxes
from core.video import det_to_vid, interpolation
from core.association import *
from tensorflow.python.saved_model import tag_constants
from core.config import cfg
from PIL import Image
import cv2
import numpy as np
import pandas as pd
import pickle
from shapely.geometry import Polygon
import matplotlib.pyplot as plt
from tensorflow.compat.v1 import ConfigProto
from tensorflow.compat.v1 import InteractiveSession
# deep sort imports
from deep_sort import preprocessing, nn_matching
from deep_sort.detection import Detection
from deep_sort.tracker import Tracker
from tools import generate_detections as gdet
flags.DEFINE_string('framework', 'tf', '(tf, tflite, trt')
#flags.DEFINE_string('weights', './checkpoints/yolov4-416',
# 'path to weights file')
flags.DEFINE_string('weights_L4', './checkpoints/yolov4-416_L4','path to weights file')
flags.DEFINE_string('weights_RHNH', './checkpoints/yolov4-416-FG','path to weights file')
flags.DEFINE_string('classes', './data/classes/4_class_detector.names','path to manes file')
flags.DEFINE_integer('size', 416, 'resize images to')
flags.DEFINE_float('rider_pred_threshold', 1.5, 'IOU/NIOU area threshold')
flags.DEFINE_boolean('tiny', False, 'yolo or yolo-tiny')
flags.DEFINE_string('model', 'yolov4', 'yolov3 or yolov4')
flags.DEFINE_string('trapezium_pred_model', './data/Trapezium_Prediction_Weights.pickle', 'add the model weights for predicting trapezium bounding box as a post-processing step')
flags.DEFINE_string('video', './data/video/3idiots.mp4', 'path to input video or set to 0 for webcam')
flags.DEFINE_string('output', './outputs/detections/3idiots.mp4', 'path to raw output video')
flags.DEFINE_string('output_format', 'mp4v', 'codec used in VideoWriter when saving video to file')
flags.DEFINE_float('iou', 0.45, 'iou threshold')
flags.DEFINE_float('score', 0.50, 'score threshold')
flags.DEFINE_boolean('dont_show', False, 'dont show video output')
flags.DEFINE_boolean('info', False, 'show detailed info of tracked objects')
flags.DEFINE_boolean('count', False, 'count objects being tracked on screen')
flags.DEFINE_boolean('interpolation', True, 'interpolate the missing bounding boxes based on future frames')
def get_instance(rider, motorcycle, iou_threshold):
"""
args:
rider, motorcycle : pd.DataFrame
output:
rider, motorycle : pd.DataFrame with a column named 'instance_id'
"""
rider['instance_id'] = -1
motorcycle['instance_id'] = -1
for i in range(len(motorcycle)):
motorcycle.iat[i,motorcycle.columns.get_loc('instance_id')] = i
for j in range(len(rider)):
if (motor_rider_iou(motorcycle.iloc[i], rider.iloc[j]) > iou_threshold):
if (rider.iloc[j]['instance_id'] == -1):
rider.iat[j,rider.columns.get_loc('instance_id')] = i
else:
instance = int(rider.iloc[j]['instance_id'])
instance_final = motor2_rider_iou(motorcycle.iloc[i], motorcycle.iloc[instance], rider.iloc[j], i, instance)
rider.iat[j,rider.columns.get_loc('instance_id')] = instance_final
return rider, motorcycle
def heuristic_on_pred(a, motor, rider_ins):
no_of_bbox = len(motor) + len(rider_ins)
if (motor['w']==0):
no_of_bbox = no_of_bbox - 1
mean_w = (rider_ins['w'].sum() + motor['w'].sum())/no_of_bbox
mean_x = (rider_ins['x'].sum() + motor['x'].sum())/no_of_bbox
if (a[4]<mean_w):
a[4] = motor['w'].mean()
if (a[0] < mean_x - mean_w/2):
a[0] = rider_ins['x'].mean()
if (a[0] > mean_x + mean_w/2):
a[0] = rider_ins['x'].mean()
return a
def corner_condition(y, xmax, ymax):
if (y[0]<0):
y[0] = 0
if (y[0]>xmax):
y[0] = xmax
if (y[1]<0):
y[1] = 0
if (y[1]>ymax):
y[1] = ymax
if (y[2]<0):
y[2] = 0
if (y[2]>xmax):
y[2] = xmax
if (y[3]<0):
y[3] = 0
if (y[3]>ymax):
y[3] = ymax
if (y[4]<0):
y[4] = 0
if (y[4]>xmax):
y[4] = xmax
if (y[5]<0):
y[5] = 0
if (y[5]>ymax):
y[5] = ymax
if (y[6]<0):
y[6] = 0
if (y[6]>xmax):
y[6] = xmax
if (y[7]<0):
y[7] = 0
if (y[7]>ymax):
y[7] = ymax
return y
def find(bbox, instance, bboxes, classes):
xmin, ymin, xmax, ymax = bbox[0], bbox[1], bbox[2], bbox[3]
flag = 10000
idx = -1
for i in range(len(bboxes)):
if (classes[i]== 'Motorcycle'):
b = bboxes[i]
val = abs(xmin-b[0]) + abs(ymin-b[1]) + abs(xmax-b[0]-b[2]) + abs(ymax-b[1]-b[3])
if (val<flag):
flag = val
idx = i
if (idx != -1):
num, num_riders = instance[idx][0], instance[idx][1]
else:
num, num_riders,val = -1, -1, flag
return num, num_riders, val
def main(_argv):
# Definition of the parameters
max_cosine_distance = 0.4
nn_budget = None
nms_max_overlap = 1.0
# initialize deep sort
model_filename = 'model_data/mars-small128.pb'
encoder = gdet.create_box_encoder(model_filename, batch_size=1)
# calculate cosine distance metric
metric = nn_matching.NearestNeighborDistanceMetric("cosine", max_cosine_distance, nn_budget)
# initialize tracker
tracker = Tracker(metric)
# load configuration for object detector
config = ConfigProto()
config.gpu_options.allow_growth = True
session = InteractiveSession(config=config)
STRIDES, ANCHORS, NUM_CLASS, XYSCALE = utils.load_config(FLAGS)
input_size = FLAGS.size
video_path = FLAGS.video
# load tflite model if flag is set
if FLAGS.framework == 'tflite':
interpreter = tf.lite.Interpreter(model_path=FLAGS.weights)
interpreter.allocate_tensors()
input_details = interpreter.get_input_details()
output_details = interpreter.get_output_details()
print(input_details)
print(output_details)
# otherwise load standard tensorflow saved model
else:
infer_L4 = keras.models.load_model(FLAGS.weights_L4)
infer_RHNH = keras.models.load_model(FLAGS.weights_RHNH)
#saved_model_loaded = tf.saved_model.load(FLAGS.weights_L4, tags=[tag_constants.SERVING])
#infer_L4 = saved_model_loaded.signatures['serving_default']
#saved_model_loaded1 = tf.saved_model.load(FLAGS.weights_RHNH, tags=[tag_constants.SERVING])
#infer_RHNH = saved_model_loaded1.signatures['serving_default']
# begin video capture
try:
vid = cv2.VideoCapture(int(video_path))
except:
vid = cv2.VideoCapture(video_path)
out = None
# get video ready to save locally if flag is set
if FLAGS.output:
# by default VideoCapture returns float instead of int
width = int(vid.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(vid.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(vid.get(cv2.CAP_PROP_FPS))
codec = cv2.VideoWriter_fourcc(*FLAGS.output_format)
out = cv2.VideoWriter(FLAGS.output, codec, fps, (width, height))
frame_num = 0
trapez_model = pickle.load(open(FLAGS.trapezium_pred_model, 'rb'))
triple_rider_violation = {}
triple_rider_violated = []
HNH_violation = {}
HNH_violations = 0
HNH_violated = []
column_names = ["frame_id", "class_name", "track_id", "trapez_0", "trapez_1", "trapez_2", "trapez_3", "trapez_4", "trapez_5", "trapez_6", "trapez_7", "bbox_0", "bbox_1", "bbox_2", "bbox_3"]
detections_tovid = []
# while video is running
while True:
return_value, frame = vid.read()
if return_value:
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
image = Image.fromarray(frame)
else:
detections_tovid = pd.DataFrame(detections_tovid, columns=column_names)
dir_path_ = os.path.dirname(FLAGS.output)
path = os.path.join(dir_path_ ,os.path.basename(FLAGS.output).split(".")[0]+".csv")
detections_tovid.to_csv(path, index=False)
interpolated_detections=interpolation(path)
print('Video has ended or failed, try a different video format!')
print('==================================')
if FLAGS.interpolation:
print('Improving tracking quality by interpolation process....')
dir_path_ = os.path.dirname(FLAGS.output)
path_ = os.path.join(dir_path_, os.path.basename(FLAGS.output).split(".")[0]+"_interpolated."+os.path.basename(FLAGS.output).split(".")[1])
det_to_vid(FLAGS.video, interpolated_detections, path_)
else:
print('Generation of camera ready video in progress....')
dir_path_ = os.path.dirname(FLAGS.output)
path_ = os.path.join(dir_path, os.path.basename(FLAGS.output).split(".")[0]+"_interpolated"+os.path.basename(FLAGS.output).split(".")[1])
det_to_vid(FLAGS.video, path, path_)
break
frame_num +=1
print('Frame #: ', frame_num)
frame_size = frame.shape[:2]
image_data = cv2.resize(frame, (input_size, input_size))
image_data = image_data / 255.
image_data = image_data[np.newaxis, ...].astype(np.float32)
start_time = time.time()
# run detections on tflite if flag is set
if FLAGS.framework == 'tflite':
interpreter.set_tensor(input_details[0]['index'], image_data)
interpreter.invoke()
pred = [interpreter.get_tensor(output_details[i]['index']) for i in range(len(output_details))]
# run detections using yolov3 if flag is set
if FLAGS.model == 'yolov3' and FLAGS.tiny == True:
boxes, pred_conf = filter_boxes(pred[1], pred[0], score_threshold=0.25,
input_shape=tf.constant([input_size, input_size]))
else:
boxes, pred_conf = filter_boxes(pred[0], pred[1], score_threshold=0.25,
input_shape=tf.constant([input_size, input_size]))
else:
batch_data = tf.constant(image_data)
pred_bbox = infer_L4.predict(batch_data)
pred_bbox1 = infer_RHNH.predict(batch_data)
for value in pred_bbox:
temp_value = np.expand_dims(value, axis=0)
boxes = temp_value[:, :, 0:4]
pred_conf = temp_value[:, :, 4:]
for value1 in pred_bbox1:
temp_value1 = np.expand_dims(value1, axis=0)
boxes1 = temp_value1[:, :, 0:4]
pred_conf1 = temp_value1[:, :, 4:]
boxes, scores, classes, valid_detections = tf.image.combined_non_max_suppression(
boxes=tf.reshape(boxes, (tf.shape(boxes)[0], -1, 1, 4)),
scores=tf.reshape(
pred_conf, (tf.shape(pred_conf)[0], -1, tf.shape(pred_conf)[-1])),
max_output_size_per_class=50,
max_total_size=50,
iou_threshold=FLAGS.iou,
score_threshold=FLAGS.score
)
boxes1, scores1, classes1, valid_detections1 = tf.image.combined_non_max_suppression(
boxes=tf.reshape(boxes1, (tf.shape(boxes1)[0], -1, 1, 4)),
scores=tf.reshape(
pred_conf1, (tf.shape(pred_conf1)[0], -1, tf.shape(pred_conf1)[-1])),
max_output_size_per_class=50,
max_total_size=50,
iou_threshold=FLAGS.iou,
score_threshold=FLAGS.score
)
# convert data to numpy arrays and slice out unused elements
num_objects = valid_detections.numpy()[0]
bboxes = boxes.numpy()[0]
bboxes = bboxes[0:int(num_objects)]
scores = scores.numpy()[0]
scores = scores[0:int(num_objects)]
classes = classes.numpy()[0]
classes = classes[0:int(num_objects)]
deleted_indx = []
allowed_classes = [0,1]
for i in range(num_objects):
class_indx = int(classes[i])
if class_indx not in allowed_classes:
deleted_indx.append(i)
bboxes = np.delete(bboxes, deleted_indx, axis=0)
scores = np.delete(scores, deleted_indx, axis=0)
classes = np.delete(classes, deleted_indx, axis=0)
num_objects = len(classes)
classes[classes == 1] = 3
num_objects1 = valid_detections1.numpy()[0]
bboxes1 = boxes1.numpy()[0]
bboxes1 = bboxes1[0:int(num_objects1)]
scores1 = scores1.numpy()[0]
scores1 = scores1[0:int(num_objects1)]
classes1 = classes1.numpy()[0]
classes1 = classes1[0:int(num_objects1)]
deleted_indx = []
allowed_classes = [0,1]
for i in range(num_objects1):
class_indx = int(classes1[i])
if class_indx not in allowed_classes:
deleted_indx.append(i)
bboxes1 = np.delete(bboxes1, deleted_indx, axis=0)
scores1 = np.delete(scores1, deleted_indx, axis=0)
classes1 = np.delete(classes1, deleted_indx, axis=0)
num_objects1 = len(classes1)
classes1[classes1 == 1] = 2
classes1[classes1 == 0] = 1
bboxes = np.concatenate((bboxes, bboxes1))
scores = np.concatenate((scores, scores1))
classes = np.concatenate((classes, classes1))
num_objects = num_objects1 + num_objects
if FLAGS.count:
#cv2.putText(frame, "Objects being tracked: {}".format(count), (5, 35), cv2.FONT_HERSHEY_COMPLEX_SMALL, 2, (0, 255, 0), 2)
print("Objects being tracked: {}".format(num_objects))
# Bounding boxes are in normalized ymin, xmin, ymax, xmax
original_h, original_w, _ = frame.shape
#getting rider, motorcycle dataframe
df = pd.DataFrame(classes, columns=['class_id'])
ymin = bboxes[:, 0]
xmin = bboxes[:, 1]
ymax = bboxes[:, 2]
xmax = bboxes[:, 3]
df['x'] = pd.DataFrame(xmin + (xmax-xmin)/2, columns=['x'])
df['y'] = pd.DataFrame(ymin + (ymax-ymin)/2, columns=['y'])
df['w'] = pd.DataFrame(xmax-xmin, columns=['w'])
df['h'] = pd.DataFrame(ymax-ymin, columns=['h'])
rider = df.loc[df['class_id']==0]
motorcycle = df.loc[df['class_id']==3]
#predicting trapezium
rider, motorcycle = get_instance(rider, motorcycle, 0.01)
y = np.zeros((len(motorcycle), 8))
num = 0
tracker_instance = []
for i in range(len(motorcycle)):
input = []
motor = motorcycle.iloc[i]
instance = motor['instance_id']
input.extend([float (motor['x']),float (motor['y']),float (motor['w']),float (motor['h'])])
rider_ins = rider.loc[rider['instance_id']==instance]
if (len(rider_ins)==0):
tracker_instance.append([-1, -1])
continue
for j in range(len(rider_ins)):
input.extend([float (rider_ins.iloc[j]['x']),float (rider_ins.iloc[j]['y']),float (rider_ins.iloc[j]['w']),float (rider_ins.iloc[j]['h'])])
tracker_instance.append([num, len(rider_ins)])
x=np.zeros((1,24))
x[0,:len(input)] = np.array(input).reshape((1,-1))
predict = trapez_model.predict(x)
a = predict[0]
a = heuristic_on_pred(a, motor, rider_ins)
y[num][0], y[num][1], y[num][2], y[num][3], y[num][4], y[num][5],y[num][6] ,y[num][7] = (a[0] - a[4]/2)*original_w,(a[5]+x[0][1]-x[0][3]/2)*original_h, (a[0] - a[4]/2)*original_w,(a[2]+x[0][1]+x[0][3]/2)*original_h, (a[0] + a[4]/2)*original_w, (a[3]+x[0][1]+x[0][3]/2)*original_h, (a[0] + a[4]/2)*original_w, (a[6]+x[0][1]-x[0][3]/2)*original_h
y[num] = corner_condition(y[num], original_w, original_h)
num = num+1
trapez_bboxes = y[:num,:]
deleted_indx = []
instance = np.zeros((len(bboxes), 2), dtype = int)
k = 0
for i in range(len(bboxes)):
if (classes[i]==3):
if (int(tracker_instance[k][1]) == -1):
deleted_indx.append(i)
else:
instance[i][:] = int(tracker_instance[k][0]), int(tracker_instance[k][1])
k = k+1
else:
instance[i][:] = -1, -1
bboxes = np.delete(bboxes, deleted_indx, axis=0)
scores = np.delete(scores, deleted_indx, axis=0)
classes = np.delete(classes, deleted_indx, axis=0)
num_objects = len(classes)
# format bounding boxes from normalized ymin, xmin, ymax, xmax ---> xmin, ymin, width, height
original_h, original_w, _ = frame.shape
bboxes = utils.format_boxes(bboxes, original_h, original_w)
# store all predictions in one parameter for simplicity when calling functions
pred_bbox = [bboxes, scores, classes, num_objects]
# read in all class names from config
class_names = utils.read_class_names(cfg.YOLO.CLASSES)
# by default allow all classes in .names file
allowed_classes = list(class_names.values())
# custom allowed classes (uncomment line below to customize tracker for only people)
#allowed_classes = ['person']
# loop through objects and use class index to get class name, allow only classes in allowed_classes list
names = []
deleted_indx = []
for i in range(num_objects):
class_indx = int(classes[i])
class_name = class_names[class_indx]
if class_name not in allowed_classes:
deleted_indx.append(i)
else:
names.append(class_name)
names = np.array(names)
count = len(names)
# delete detections that are not in allowed_classes
bboxes = np.delete(bboxes, deleted_indx, axis=0)
scores = np.delete(scores, deleted_indx, axis=0)
# encode yolo detections and feed to tracker
features = encoder(frame, bboxes)
detections = [Detection(bbox, score, class_name, feature) for bbox, score, class_name, feature in zip(bboxes, scores, names, features)]
#initialize color map
cmap = plt.get_cmap('tab20b')
colors = [cmap(i)[:3] for i in np.linspace(0, 1, 20)]
# run non-maxima supression
boxs = np.array([d.tlwh for d in detections])
scores = np.array([d.confidence for d in detections])
classes = np.array([d.class_name for d in detections])
indices = preprocessing.non_max_suppression(boxs, classes, nms_max_overlap, scores)
detections = [detections[i] for i in indices]
# Call the tracker
tracker.predict()
tracker.update(detections)
# update tracks
num = 0
j=0
track_ids = []
nums = []
riders = []
vals = []
for track in tracker.tracks:
if not track.is_confirmed() or track.time_since_update > 1:
continue
bbox = track.to_tlbr()
class_name = track.get_class()
if (class_name != 'Motorcycle'):
continue
num, num_riders, val = find(bbox, instance, bboxes, classes)
if (num==-1):
continue
if (num not in nums):
track_ids.append(track.track_id)
nums.append(num)
riders.append(num_riders)
vals.append(val)
continue
idx = nums.index(num)
if (val<=vals[idx]):
track_ids[idx] = track.track_id
vals[idx] = val
riders[idx] = num_riders
for track in tracker.tracks:
if not track.is_confirmed() or track.time_since_update > 1:
continue
bbox = track.to_tlbr()
class_name = track.get_class()
color = [255, 0, 0]
if (class_name == 'No-Helmet'):
if track not in HNH_violation:
HNH_violation[track] = 1
if track in HNH_violation:
HNH_violation[track]+=1
if HNH_violation[track]==2:
HNH_violated.append(track)
if track in HNH_violated:
color = [255, 0, 0]
cv2.rectangle(frame, (int(bbox[0]), int(bbox[1])), (int(bbox[2]), int(bbox[3])), color, 2)
cv2.rectangle(frame, (int(bbox[0]), int(bbox[1]-30)), (int(bbox[0])+(5+len(str(track.track_id)))*17, int(bbox[1])),(255,0,0), -1)
cv2.putText(frame, "ID:" + str(track.track_id),(int(bbox[0]), int(bbox[1]-10)),0, 0.75, (255,255,255),2)
detections_tovid.append([str(frame_num), "No-Helmet", str(track.track_id), "0", "0", "0", "0", "0", "0", "0", "0", str(int(bbox[0])), str(int(bbox[1])), str(int(bbox[2])), str(int(bbox[3])) ])
continue
if (class_name == "Helmet"):
color = [0,255, 0]
cv2.rectangle(frame, (int(bbox[0]), int(bbox[1])), (int(bbox[2]), int(bbox[3])), color, 2)
cv2.rectangle(frame, (int(bbox[0]), int(bbox[1]-30)), (int(bbox[0])+(5+len(str(track.track_id)))*17, int(bbox[1])),(0,255,0), -1)
cv2.putText(frame, "ID:" + str(track.track_id),(int(bbox[0]), int(bbox[1]-10)),0, 0.75, (255,255,255),2)
detections_tovid.append([str(frame_num), "Helmet", str(track.track_id), "0", "0", "0", "0", "0", "0", "0", "0", str(int(bbox[0])), str(int(bbox[1])), str(int(bbox[2])), str(int(bbox[3])) ])
continue
if class_name == 'Motorcycle':
if (track.track_id not in track_ids):
continue
idx = track_ids.index(track.track_id)
num = nums[idx]
num_riders = riders[idx]
if (num==-1):
continue
if track not in triple_rider_violation:
triple_rider_violation[track] = 0
if (num_riders>2):
triple_rider_violation[track] += 1
if ( triple_rider_violation[track]>=3):
if (track not in triple_rider_violated):
triple_rider_violated.append(track)
trapez = trapez_bboxes[int(num)]
if (len(trapez)==0):
continue
pts = np.array([[[trapez[0], trapez[1]], [trapez[2], trapez[3]], [trapez[4], trapez[5]], [trapez[6], trapez[7]]]], np.int32)
pts = pts.reshape((-1, 1, 2))
if (track in triple_rider_violated):
color = [255, 0, 0]
cv2.polylines(frame, [pts], True , color, 2)
cv2.putText(frame, "ID:"+ str(track.track_id),(int(bbox[0]), int(bbox[1]-10)),0, 0.75, (255,255,255),2)
detections_tovid.append([str(frame_num), "Triple_Rider", str(track.track_id), str(int(trapez[0])), str(int(trapez[1])), str(int(trapez[2])), str(int(trapez[3])), str(int(trapez[4])), str(int(trapez[5])), str(int(trapez[6])), str(int(trapez[7])), "0", "0", "0", "0"])
elif (num_riders<=2):
color = [0,255, 0]
cv2.polylines(frame, [pts], True , color, 2)
cv2.putText(frame, "ID:"+ str(track.track_id),(int(bbox[0]), int(bbox[1]-10)),0, 0.75, (255,255,255),2)
detections_tovid.append([str(frame_num), "safe_rider", str(track.track_id), str(int(trapez[0])), str(int(trapez[1])), str(int(trapez[2])), str(int(trapez[3])), str(int(trapez[4])), str(int(trapez[5])), str(int(trapez[6])), str(int(trapez[7])), "0", "0", "0", "0"])
if FLAGS.info:
print("Tracker ID: {}, Class: {}, BBox Coords (xmin, ymin, xmax, ymax): {}".format(str(track.track_id), class_name, (int(bbox[0]), int(bbox[1]), int(bbox[2]), int(bbox[3]))))
# calculate frames per second of running detections
fps = 1.0 / (time.time() - start_time)
print("FPS: %.2f" % fps)
cv2.rectangle(frame,(0,0),(425,50),(255,0,0),-1)
cv2.putText(frame, 'Triple Rider Violations:' + str(len(triple_rider_violated)),(30,30),0, 1, (255,255,255),2)
cv2.rectangle(frame,(original_w - 425,0),(original_w,50),(255,0,0),-1)
cv2.putText(frame, 'Helmet-Violations : ' + str(len(HNH_violated)),(original_w - 425 + 30,30),0, 1, (255,255,255),2)
cv2.putText(frame, 'frame_num : ' + str(frame_num),(original_w-850 + 30,30),0, 1, (0,0,0),2)
result = np.asarray(frame)
result = cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)
if not FLAGS.dont_show:
cv2.imshow("Output Video", result)
# if output flag is set, save video file
if FLAGS.output:
out.write(result)
if cv2.waitKey(1) & 0xFF == ord('q'): break
cv2.destroyAllWindows()
if __name__ == '__main__':
try:
app.run(main)
except SystemExit:
pass
需要代码的可以私信本人获取-----------------------------------------------------------------------------------------------------》

















 1204
1204











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











